一、前言
本例展示了如何模拟单基地脉冲雷达的接收信号以估计目标范围。单基地雷达将发射器与接收器并置。发射器产生一个脉冲,该脉冲击中目标并产生接收器接收的回波。通过测量回波在时间上的位置,我们可以估计目标的范围。
本示例重点介绍脉冲雷达系统设计,该系统可以实现一组设计规范。它概述了将设计规范(如探测概率和距离分辨率)转换为雷达系统参数(如发射功率和脉冲宽度)的步骤。它还对环境和目标进行建模,以合成接收的信号。最后,将信号处理技术应用于接收信号以检测目标的范围。
二、设计规格
该脉冲雷达系统的设计目标是在距离雷达最远5000米的距离内检测至少具有50平方米雷达横截面(RCS)的非波动目标,距离分辨率为0米。所需的性能指标是检测概率 (Pd) 为 9.1,误报概率 (Pfa) 低于 6e-<>。由于相干检测需要相位信息,因此计算成本更高,因此我们采用非相干检测方案。此外,此示例假定为可用空间环境。
三、单基地雷达系统设计
我们需要定义雷达系统的几个特征,例如波形、接收器、发射器以及用于辐射和收集信号的天线。
3.1波形
在本例中,我们选择矩形波形。所需的距离分辨率决定了波形的带宽,对于矩形波形,带宽决定了脉冲宽度。
脉冲波形的另一个重要参数是脉冲重复频率(PRF)。PRF 由最大明确范围决定。
请注意,我们将采样率设置为带宽的两倍。
3.2 接收器噪声特性
我们假设接收器中存在的唯一噪声是热噪声,因此此仿真中不涉及杂乱。热噪声的功率与接收器带宽有关。接收器的噪声带宽设置为与波形带宽相同。在实际系统中通常就是这种情况。我们还假设接收器具有20 dB增益和0 dB噪声系数。
3.3 发射机
发射器最关键的参数是峰值发射功率。所需的峰值功率与许多因素有关,包括最大明确范围、接收器所需的SNR以及波形的脉冲宽度。其中,接收器所需的信噪比由Pd和Pfa的设计目标以及接收器实施的检测方案决定。
Pd、Pfa 和 SNR 之间的关系可以用接收器工作特性 (ROC) 曲线来最好地表示。我们可以使用以下命令生成曲线,其中 Pd 是 Pfa 的函数,用于改变 SNR:
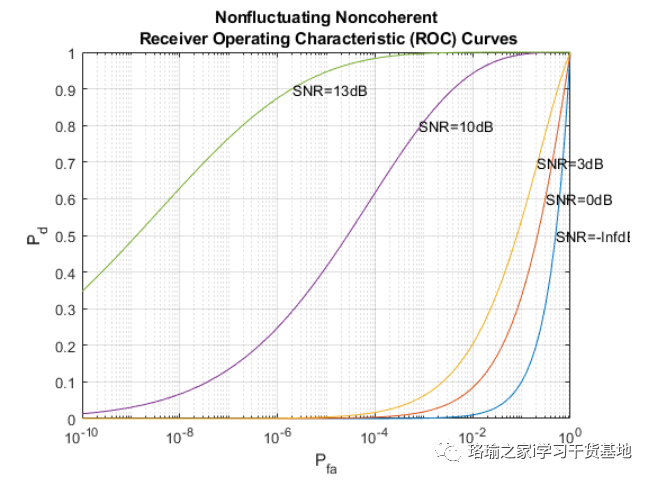
ROC曲线表明,为了满足Pfa = 1e-6和Pd = 0.9的设计目标,接收信号的SNR必须超过13 dB。这是一个相当高的要求,不是很实用。为了使雷达系统更可行,我们可以使用脉冲积分技术来降低所需的SNR。如果我们选择积分 10 个脉冲,曲线可以生成为

我们可以看到所需的功率已降至5 dB左右。可以通过积分更多的脉冲来进一步降低SNR,但由于目标的运动或环境的异质性,可用于积分的脉冲数量通常受到限制。
上述方法从曲线中读出SNR值,但通常只计算所需的值是可取的。对于非相干检测方案,所需信噪比的计算理论上相当复杂。幸运的是,有很好的近似值,例如阿尔伯斯海姆方程。使用阿尔伯斯海姆方程,所需的信噪比可以推导出为
一旦我们在接收器上获得所需的SNR,就可以使用雷达方程计算发射器的峰值功率。这里我们假设发射器的增益为20 dB。
为了使用雷达方程计算峰值功率,我们还需要知道传播信号的波长,这与系统的工作频率有关。在这里,我们将工作频率设置为 10 GHz。
请注意,由此产生的功率约为 5 kW,这是非常合理的。相比之下,如果我们不使用脉冲积分技术,产生的峰值功率将是33 kW,这是巨大的。
有了所有这些信息,我们就可以配置变送器了。
同样,由于此示例对单基地雷达系统进行建模,因此 InUseOutputPort 设置为 true 以输出发射器的状态。然后,该状态信号可用于使能接收器。
3.4 散热器和集电器
在雷达系统中,信号以电磁波的形式传播。因此,信号需要由雷达系统中使用的天线辐射和收集。这就是散热器和收集器进入图片的地方。
在单基地雷达系统中,辐射器和集电极共享同一天线,因此我们将首先定义天线。为了简化设计,我们选择了各向同性天线。请注意,天线需要能够在系统的工作频率(10 GHz)下工作,因此我们将天线的频率范围设置为5-15 GHz。
我们假设天线是静止的。根据天线和工作频率,我们定义了辐射器和集电极。
这样就完成了雷达系统的配置。在以下部分中,我们将定义其他实体,例如模拟所需的目标和环境。然后,我们将模拟信号返回并对模拟信号进行距离检测。
四、系统仿真
4.1 目标
为了测试我们的雷达探测目标的能力,我们必须首先定义目标。让我们假设太空中有 3 个静止的、非波动的目标。它们的位置和雷达横截面如下。
4.2 传播环境
为了模拟信号,我们还需要定义雷达系统和每个目标之间的传播信道。
由于此示例使用单基地雷达系统,因此通道设置为模拟双向传播延迟。
4.3 信号合成
现在,我们已准备好模拟整个系统。
合成的信号是一个数据矩阵,每列都有快速时间(每个脉冲内的时间),每行都有慢时间(脉冲之间的时间)。为了可视化信号,定义快速时间网格和慢时间网格很有帮助。
以下循环模拟接收信号的 10 个脉冲。
我们为接收器中的噪声生成设置种子,以便我们可以重现相同的结果。
五、距离检测
5.1 检测阈值
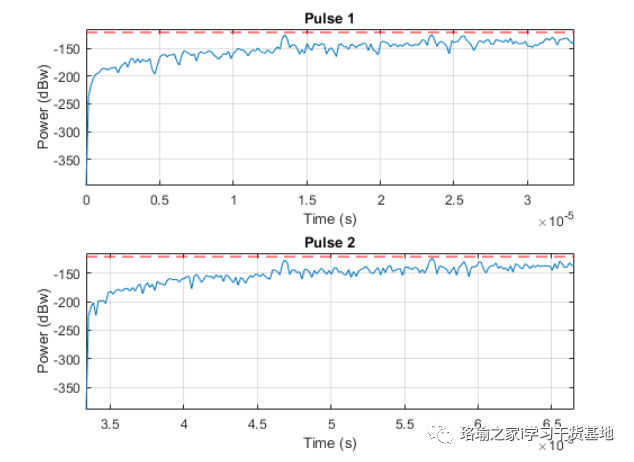
检波器将信号功率与给定阈值进行比较。在雷达应用中,通常选择阈值以使 Pfa 低于某个水平。在这种情况下,我们假设噪声是白色高斯噪声,检测是非相干的。由于我们也使用 10 个脉冲进行脉冲积分,因此信号功率阈值由下式给出。我们用阈值绘制前两个接收到的脉冲

这些图中的阈值仅用于显示目的。请注意,第二个和第三个目标回波比第一个回波弱得多,因为它们离雷达更远。因此,接收到的信号功率与范围有关,阈值对位于不同范围的目标不公平。
5.2 匹配过滤器
匹配滤波器提供处理增益,从而提高检测阈值。它将接收到的信号与发射波形的局部、时间反转和共轭副本进行卷积。因此,我们必须在创建匹配滤波器时指定传输的波形。接收到的脉冲首先通过匹配滤波器以提高SNR,然后再进行脉冲积分、阈值检测等。
匹配滤波器引入固有滤波器延迟,使峰值位置(最大SNR输出样本)不再与真实目标位置对齐。为了补偿这种延迟,在本例中,我们将匹配滤波器的输出向前移动,并在末尾填充零。请注意,在实际系统中,由于数据是连续收集的,因此实际上没有尽头。
然后,阈值通过匹配的滤波器处理增益增加。下图显示了相同的两个脉冲通过匹配滤波器后的情况。

在匹配滤波器级之后,SNR得到改善。但是,由于接收信号功率取决于范围,因此近距离目标的返回仍然比远处目标的返回要强得多。因此,如上图所示,来自近距离箱的噪声也有很大的机会超过阈值并遮蔽更远的目标。为了确保阈值对可检测范围内的所有目标都是公平的,我们可以使用时变增益来补偿接收回波中的距离相关损耗。
为了补偿与距离相关的损耗,我们首先计算对应于每个信号样本的范围门,然后计算对应于每个范围门的自由空间路径损耗。获得该信息后,我们对接收到的脉冲施加时变增益,以便返回值好像来自相同的参考范围(最大可检测范围)。
现在让我们在范围归一化后绘制相同的两个脉冲
时变增益操作导致本底噪声斜坡上升。但是,目标回报现在与范围无关。现在可以使用恒定阈值在整个可检测范围内进行检测。
请注意,在此阶段,阈值高于每个脉冲中包含的最大功率电平。因此,现阶段还无法检测到任何内容。我们需要执行脉冲积分,以确保来自目标的返回回波的功率可以超过阈值,同时使本底噪声低于条。这是意料之中的,因为它是脉冲积分,允许我们使用较低功率的脉冲序列。
5.3 非相干积分
我们可以通过非相干积分(视频积分)接收到的脉冲来进一步提高信噪比。
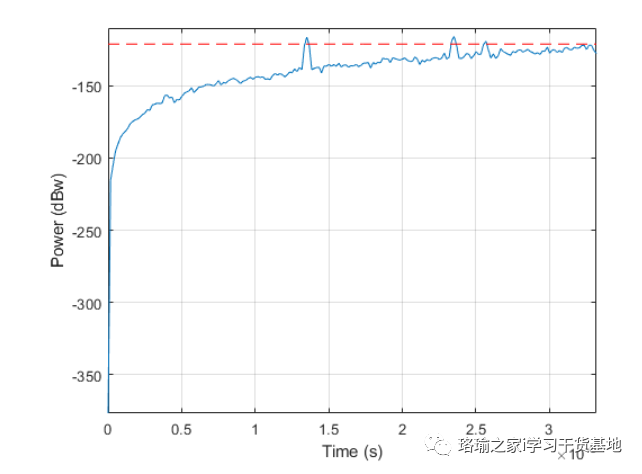
在视频集成阶段之后,数据已准备好进入最终检测阶段。从图中可以看出,来自目标的所有三个回波都高于阈值,因此可以检测到。
5.4 距离检测
最后,对积分脉冲进行阈值检测。检测方案识别峰值,然后将其位置转换为目标范围。
请注意,这些距离估计值仅在雷达系统可以实现的距离分辨率(50 m)下准确。
六、总结
在本例中,我们根据一组给定的性能目标设计了一个雷达系统。根据这些性能目标,计算了雷达系统的许多设计参数。该示例还展示了如何使用设计的雷达来执行距离检测任务。
七、程序
使用Matlab R2022b版本,点击打开。(版本过低,运行该程序可能会报错)
打开下面的“XXX.m”文件,点击运行,就可以看到上述效果。
程序下载:https://download.csdn.net/download/weixin_45770896/87666452