名义模型干扰观测器
理论推导

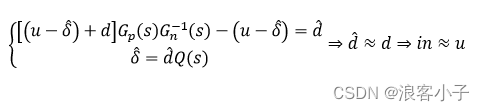
所谓被控对象的名义模型,就是说,实际被控对象无论是通过系统建模还是系统辨识,都无法获得十分精确的参数,名义模型就是与实际系统模型相近的模型,可近似二者相同,即
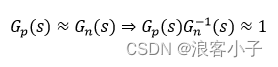
则
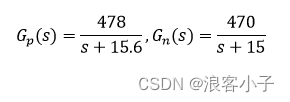
连续系统
令
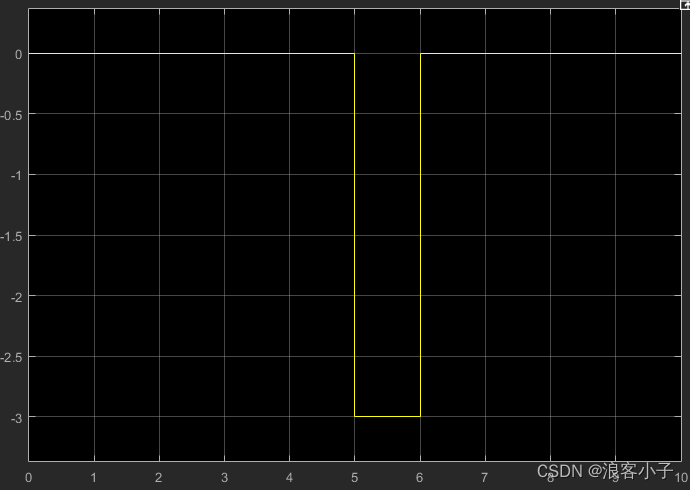
干扰信号为在
5
−
6
s
5-6s
5−6s内将输入信号幅值减小3个单位,如下所示:
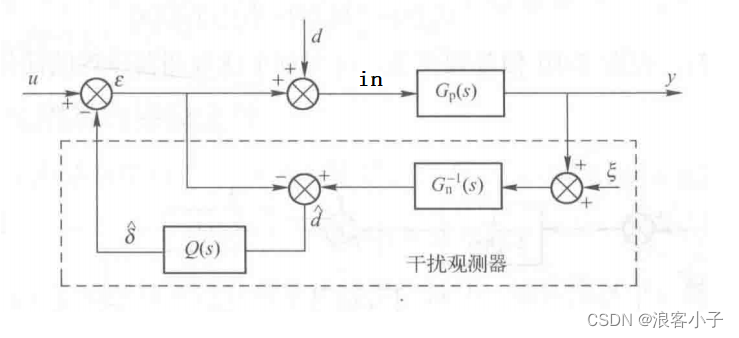
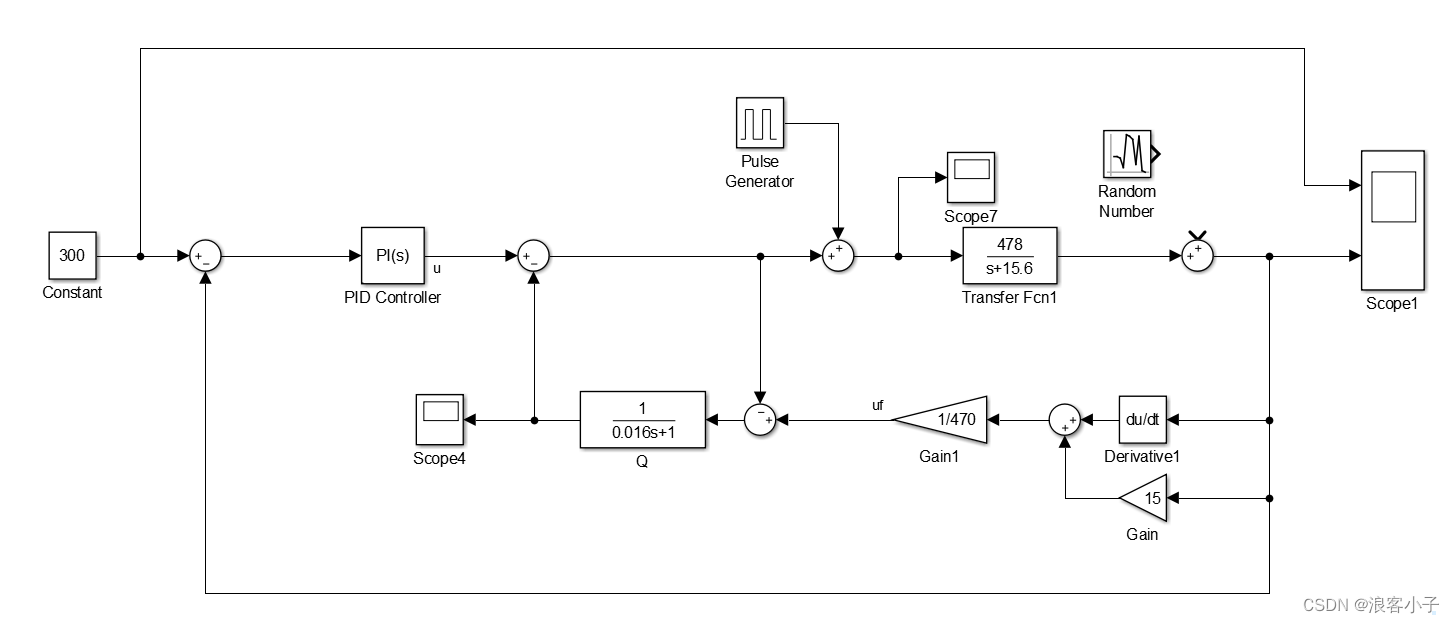
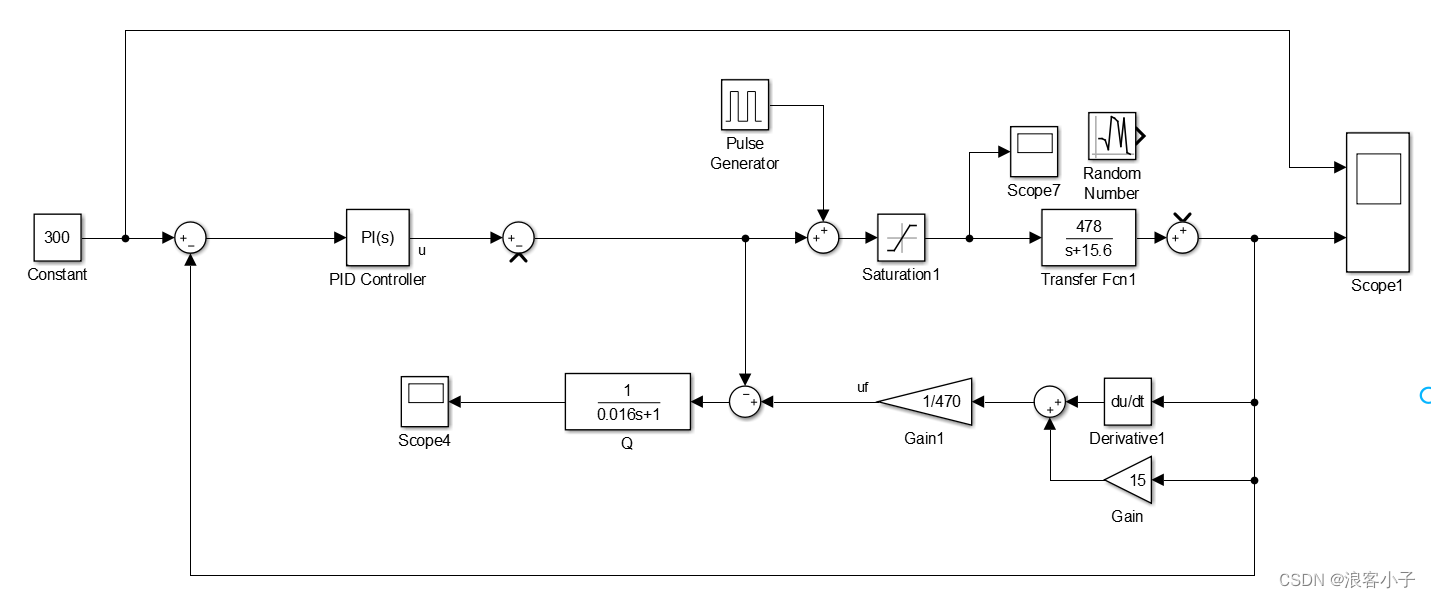
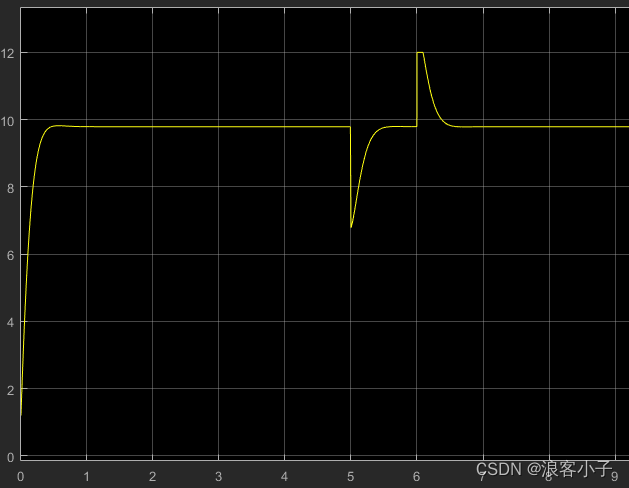
添加扰动补偿
系统框图如下:
输出响应:
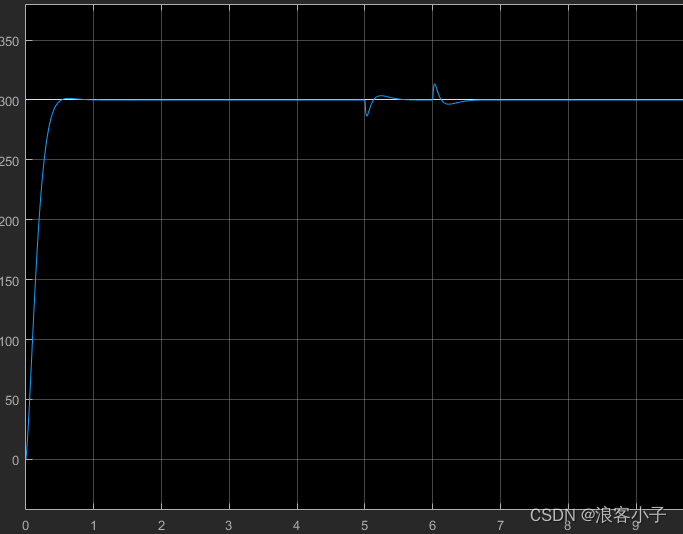
由上图可以看出,系统响应在
5
−
6
s
5-6s
5−6s内出现波动,但幅度不大。
系统实际输入信号
i
n
in
in如下所示:
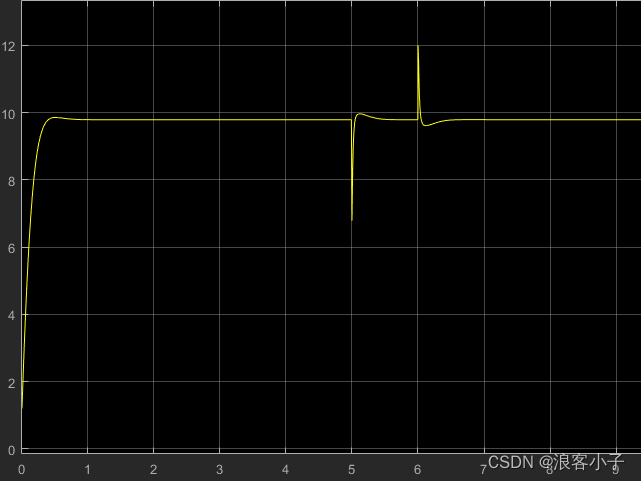
可见,信号
i
n
in
in很快将干扰信号衰减掉。
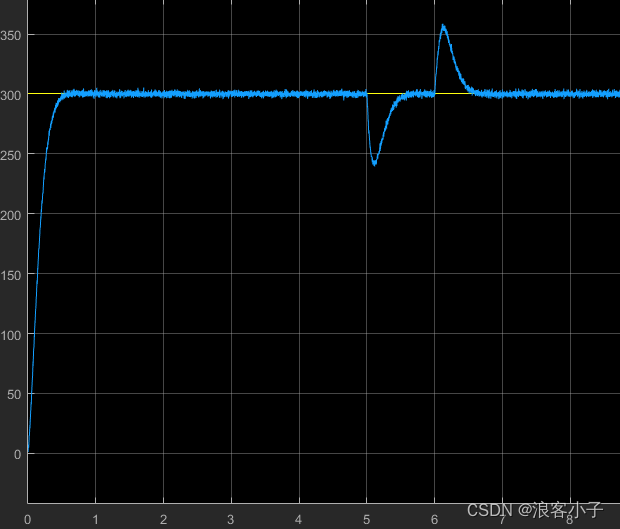
不添加扰动补偿
系统框图如下:
输出响应:
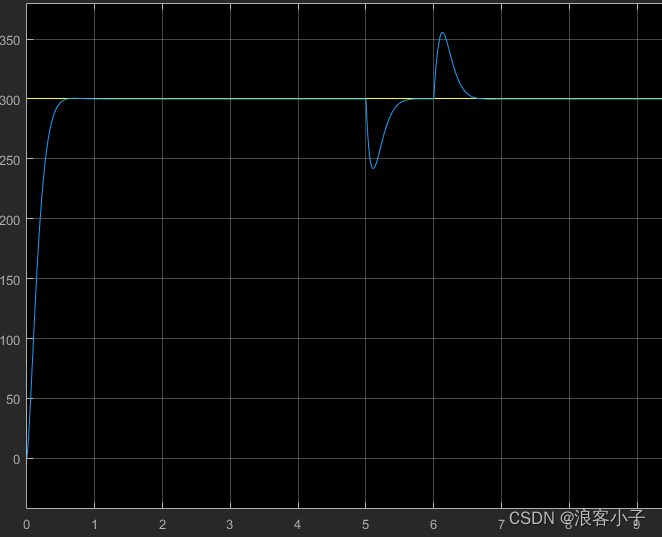
由上图可见,不添加扰动补偿时,系统输出响应在
5
−
6
s
5-6s
5−6s内波动幅度较大。
系统实际输入信号
i
n
in
in如下所示:
信号
i
n
in
in对干扰信号衰的衰减速度就比较慢了。
通过对比可见,加入扰动补偿后,系统的响应更加平稳,抗干扰能力明显增强,但也有明显的缺点,就是估计扰动信号时引入了微分,其将会放大噪声的影响,而低通滤波器
Q
(
s
)
Q(s)
Q(s)又不能将截止频率设置的很低,否则系统将会降低干扰信号的衰减速度,最终不能达到预期效果。添加测量噪声后,系统响应如下:
这就很糟糕了。
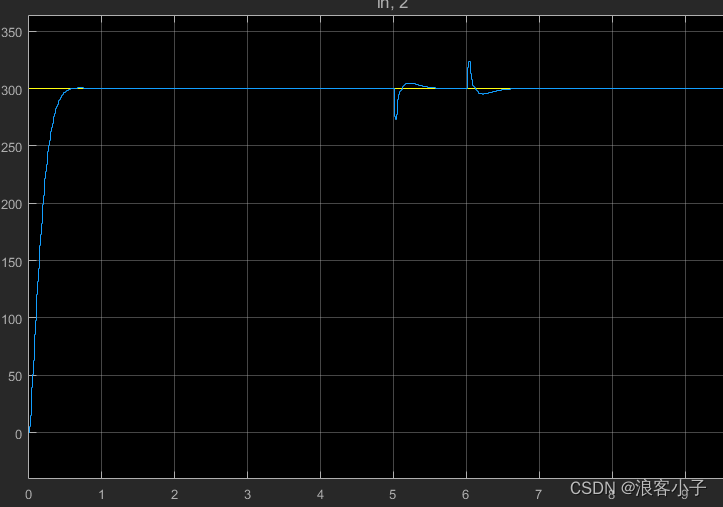
离散系统

系统框图如下:
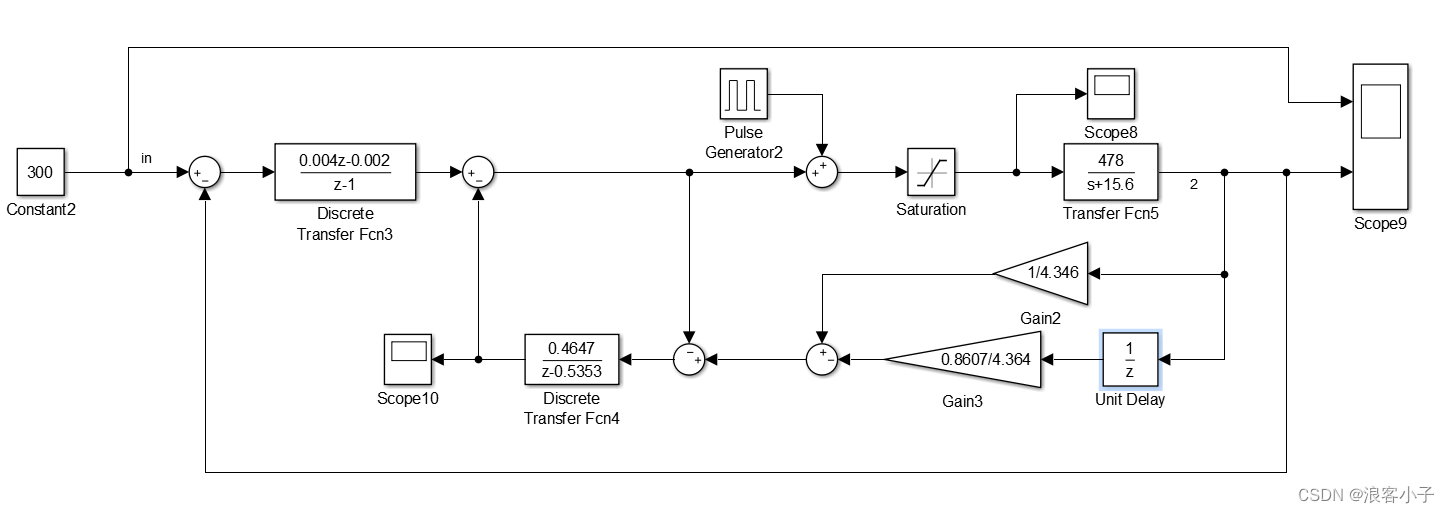
系统响应如下:
指数收敛干扰观测器
理论分析
假设某一阶系统如下:
可得
设计观测器的思想就是,利用估计值与实际值的差值来修正估计值,可将观测器设计为
干扰
d
d
d的变化是缓慢的,即
令观测误差为
则

该微分方程的解为
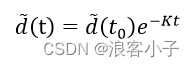
由上式可知,观测误差是呈指数收敛的,收敛速度由
K
K
K决定。我们再看看设计的观测器
这个观测器并不是完美的,因为有系统输出的微分,这与名义模型干扰观测器有相同的不足,故而还需要对观测器进行改善。将上式变形
令
则
于是有

那么新的观测器设计为
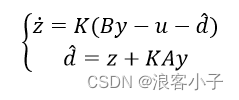
可以看出,新的观测器不在有系统输出的微分,利用辅助变量
z
z
z相当于对模型降阶,再来对这个干扰观测器进行分析
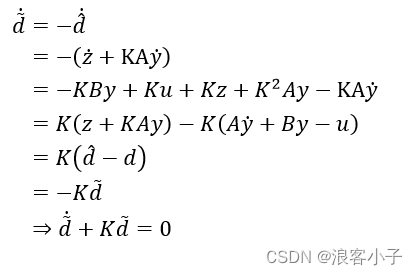
该微分方程的解为
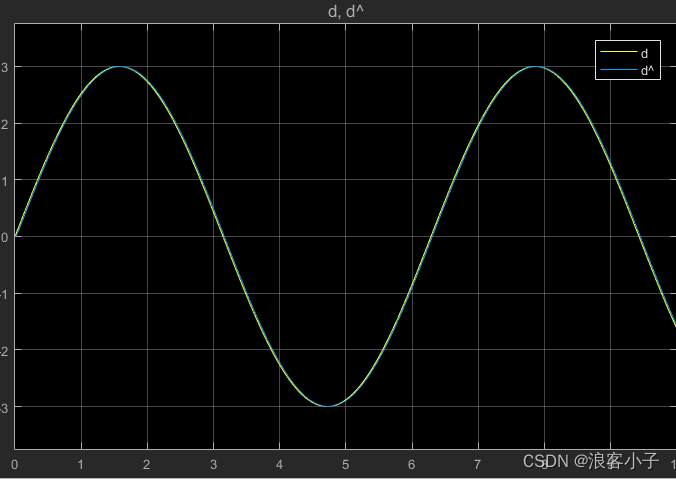
仿真
仍以上述系统为例:

系统框图如下:
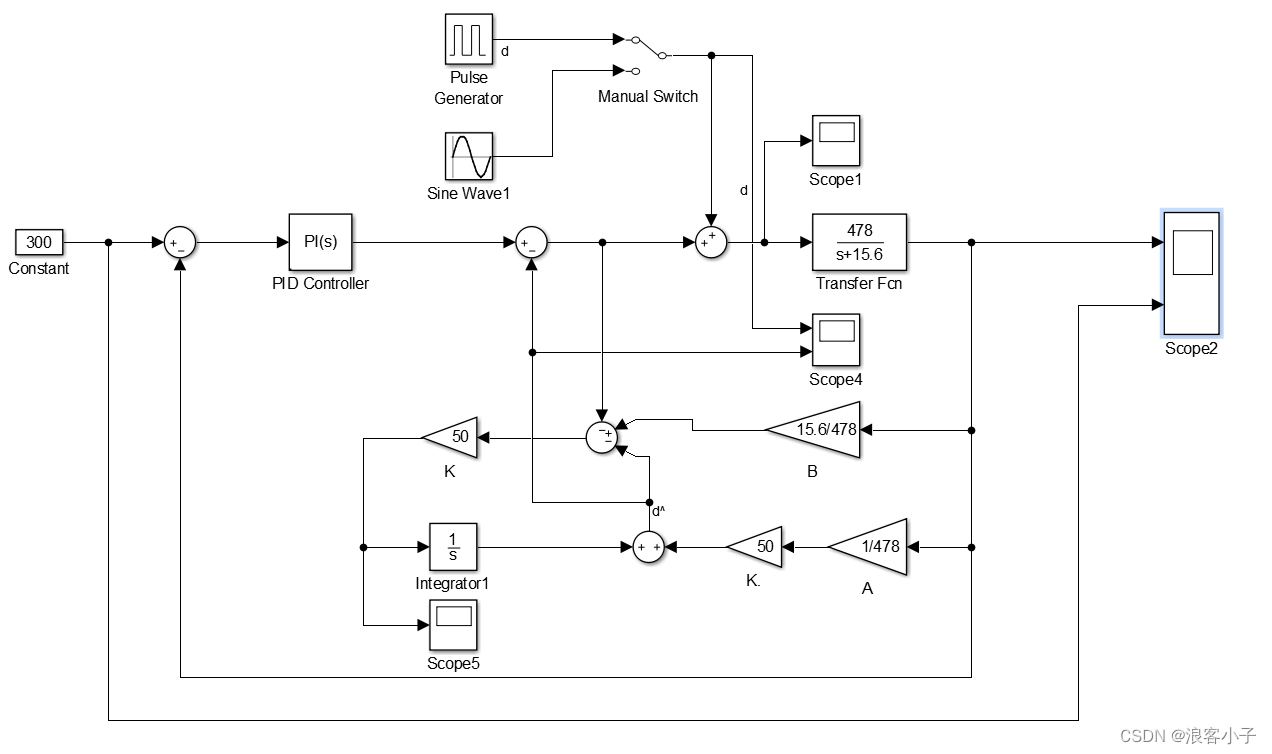
系统响应:
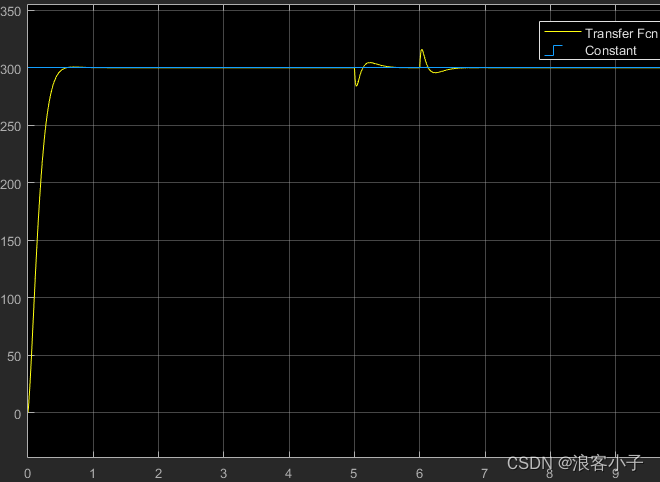
可见系统受干扰的影响较小,再看看估计的干扰值
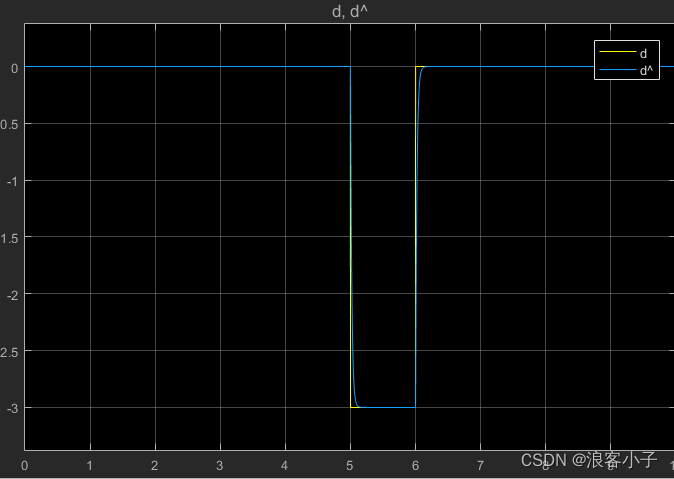
可见,对干扰的观测效果较好,我们在看看正弦干扰信号的观测
可见对正弦干扰信号的观测效果也较为理想。