一、前言
本示例模拟定期扫描预定义监视区域的相控阵雷达。该单基地雷达使用900元件矩形阵列。介绍了根据规范推导雷达参数的步骤。合成接收到的脉冲后,进行检测和距离估计。最后,利用多普勒估计得到每个目标的速度。
二、雷达定义
首先,我们创建一个相控阵雷达。现有的雷达设计符合以下规格。
加载雷达系统并检索系统参数。接下来,我们定义一个 30 x 30 的统一矩形数组。
将阵列与散热器和收集器关联。现在我们需要重新计算发射功率。原始发射功率是根据单个天线计算的。对于 900 个元素的阵列,每个元素所需的功率要小得多。
新的峰值功率为 0.0065 瓦。
我们还需要设计相控阵的扫描时间表。为了简化示例,我们只在方位角维度进行搜索。我们要求雷达在方位角上从 45 度搜索到 -45 度。重访时间应小于1秒,这意味着雷达应在1秒内重访相同的方位角。
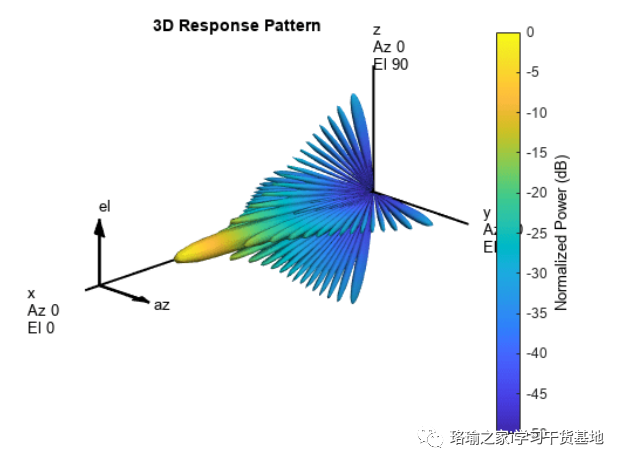
为了确定所需的扫描次数,我们需要知道阵列响应的波束宽度。我们使用经验公式来估计 3 dB 波束宽度。
dB 波束宽度为 6.77 度。为了允许空间中的一些光束重叠,我们选择扫描步长为6度。
由此产生的重访时间为 0.005 秒,远低于规定的 1 秒上限。
三、目标定义
我们想要模拟来自两个非波动目标的脉冲返回,这两个目标都在0度仰角。第一个目标正在接近雷达,而第二个目标正在远离雷达。
四、脉冲合成
现在所有子系统都已定义,我们可以继续模拟接收到的信号。总模拟时间相当于一次通过监控区域。由于反射信号由阵列接收,因此我们使用指向转向方向的波束成形器来获得组合信号。
五、匹配过滤器
为了处理接收到的信号,我们首先将其通过匹配的滤波器,然后对每个扫描角度的所有脉冲进行积分。
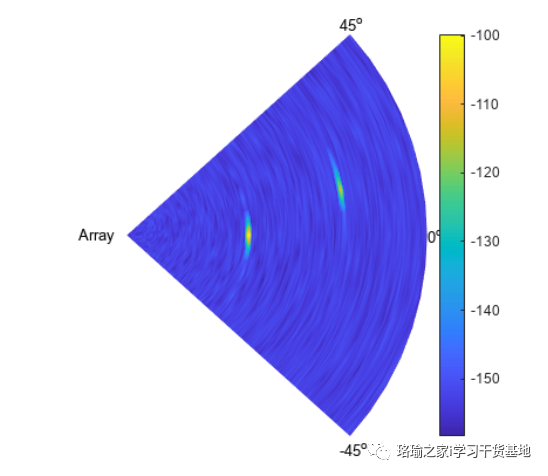
从扫描图中,我们可以清楚地看到两个山峰。近距离的方位角约为 0 度,远处的方位角约为 10 度。
六、检测和距离估计
为了获得目标参数的准确估计,我们在扫描图上应用阈值检测。首先,我们需要通过对接收到的信号施加时变增益来补偿由于范围引起的信号功率损耗。
我们现在可视化检测过程。为了更好地表示数据,我们只绘制超过 50 的范围样本。
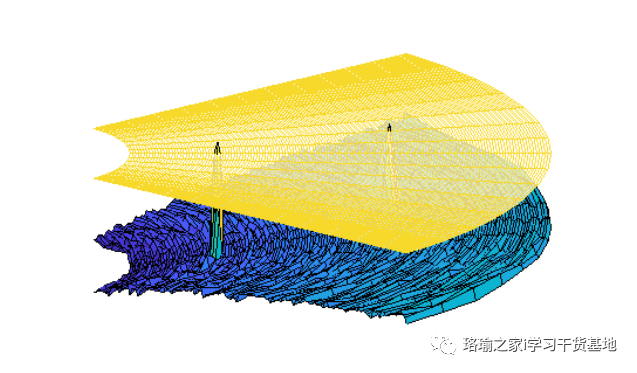
检测阈值上方有两个可见的峰值,对应于我们之前定义的两个目标。我们可以找到这些峰的位置,并估计每个目标的范围和角度。
七、多普勒估计
接下来,我们要估计每个目标的多普勒速度。
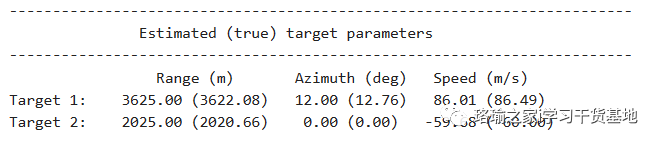
最后,我们估计了两个检测到的目标的所有参数。以下是估计参数值和真实参数值的比较。
八、总结
在本例中,我们展示了如何仿真相控阵雷达以扫描预定义的监视区域。我们说明了如何设计扫描计划。传统的波束成形器用于处理接收到的多通道信号。从反射脉冲中提取每个目标的距离、角度和多普勒信息。此信息可用于进一步的任务,例如高分辨率到达方向估计或目标跟踪。
九、程序
使用Matlab R2022b版本,点击打开。(版本过低,运行该程序可能会报错)
打开下面的“XXX.mlx”文件,点击运行,就可以看到上述效果。
程序下载:https://download.csdn.net/download/weixin_45770896/87666448