在深度学习领域中,图像分类,目标检测和目标分割是三个相对来说较为基础的任务了。再加上图像生成(GAN,VAE,扩散模型),keypoints关键点检测等等,基本上涵盖了图像领域大部分场景了。
尤其是在目标检测,一直是各大比赛(Pascal VOC, COCO, ImageNet)的主要任务。与此同时,检测任务中的两大流派:one-stage、two-stage一直是热议的话题。同时,也是面试官最喜欢问的话题。
针对本文的这个问题,我也帮你们提前问了chatGPT,也给出了一个较为总结性的回答,如下所示。你们觉得它回答的如何呢?
chatGPT已经对本节的内容,给出了一个大体的概括,总结下,包括
算法模型呢:
- one stage的算法包括SSD、yolo、Retina Net等等
- two stage的算法包括fast RCNN系列,和用于分割的Mask RCNN系列
优点呢:
- one stage的算法速度非常快,适合做实时检测的任务,比如视频
- two stage的算法速度慢,
缺点呢?
- one stage的算法通常相比于two stage的算法,效果不太好
- two stage的算法经过了一步初筛,通常效果会更好,更准确
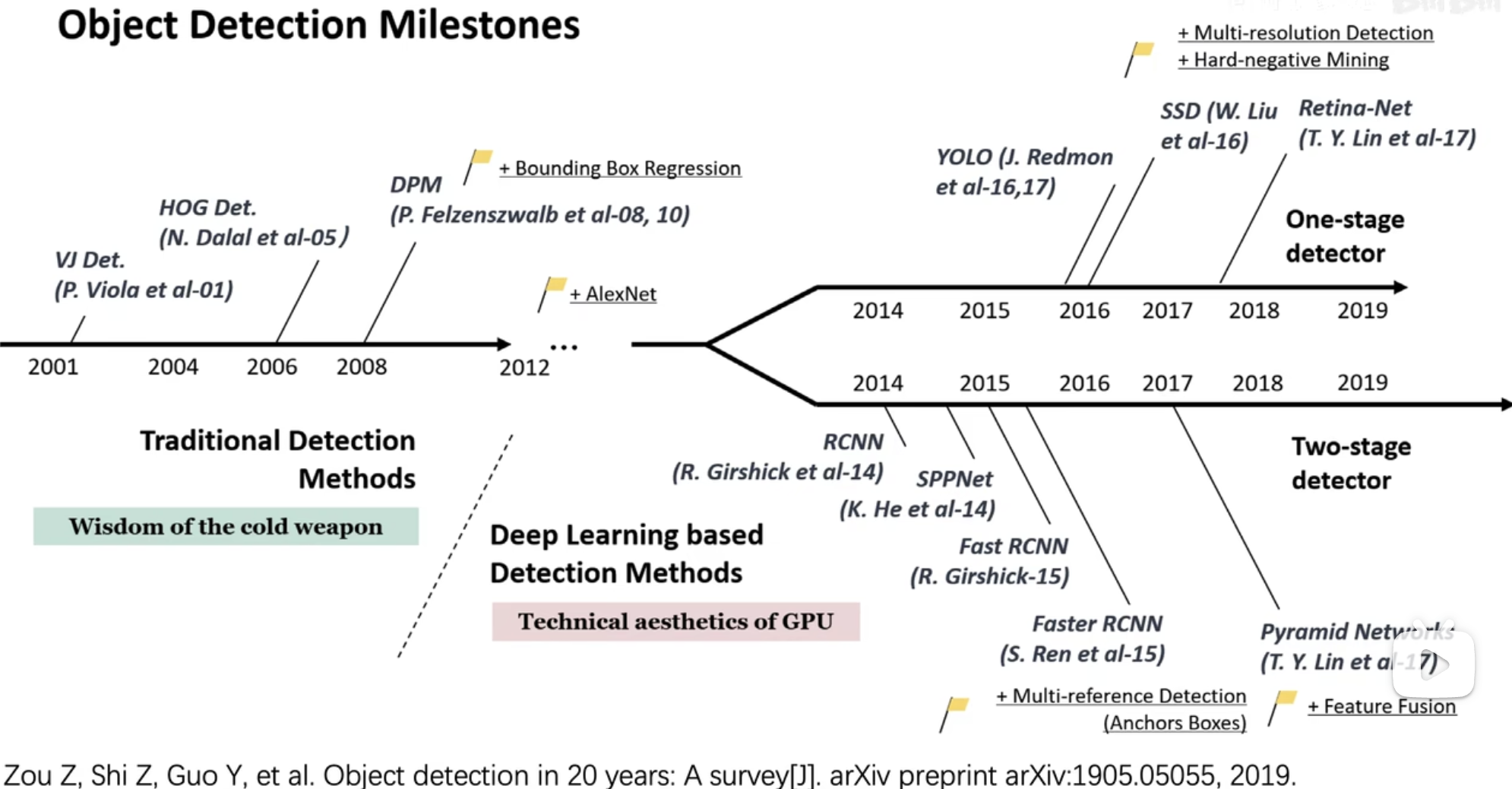
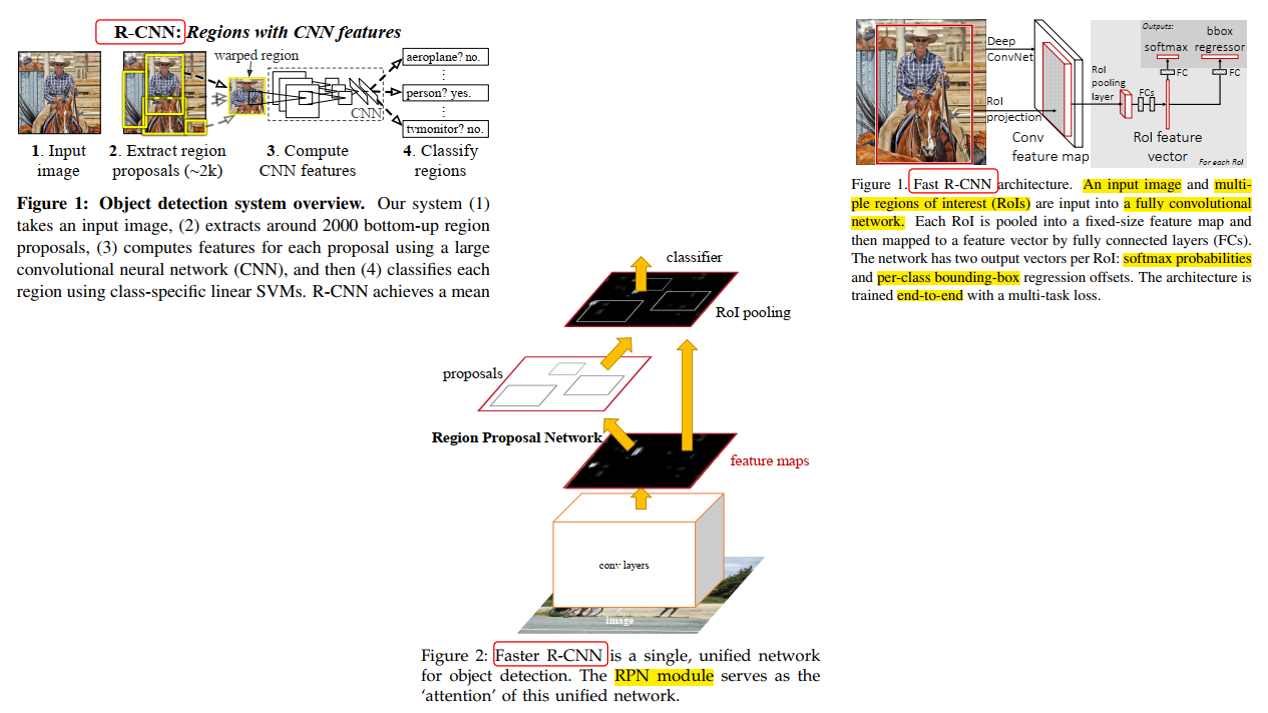
目标检测算法综述截图,展示了随时间发展,one- stage和two- stage的发展分枝。从2014年RCNN开始,再到后来SSD和YOLO的横空出世,基本上奠定了两条路的主基调。
一、two stage
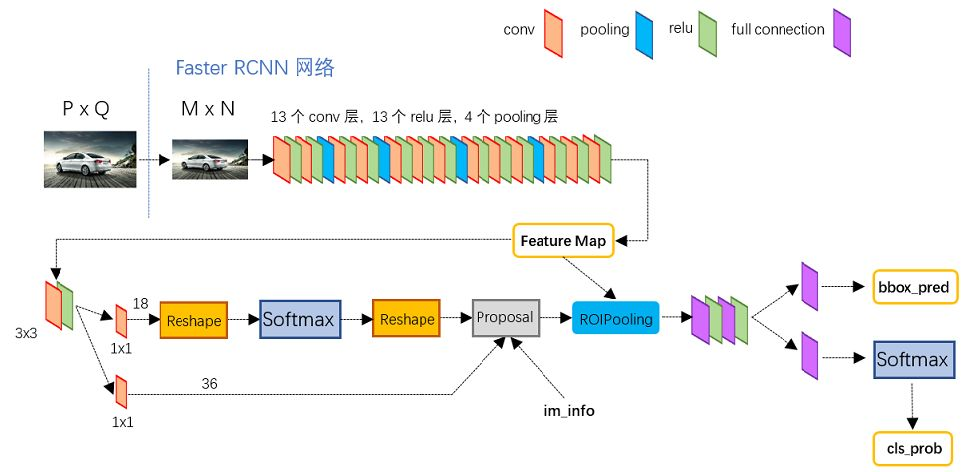
two stage的代表faster RCNN的模型结构图。稍微简述下:
- 特征提取模块
backbone,主要用于对输入图像进行特征抽取,输出特征图Feature Map,一般会采用resnet、VGG,GoogLeNet的主干部分(去掉全连接层)作为backbone. - 第一阶段的
RPN(region proposal network)区域推荐网络,主要就是基于backbone输出的Feature Map,筛选目标候选框,给出进一步判断的Proposal - 在
RPN完成后,得到的候选框还只是区分出它是前景positive和背景negative,还不能区分是猫,还是狗 - 于是,就有了第二阶段,对第一阶段提议的
阳性positive候选框Proposal,与backbone输出的Feature Map,裁剪出区域,经过ROI Pooling,统一到一致的尺寸,进入到ROI Head阶段。 - 经过卷积和全连接层,区分出具体的
类别cls和bbox coor(cx, cy, pw, ph)的偏移量(tx, ty, tw, th),进一步修正目标框,得到最终的位置(bx=σ(tx)+cx, by=σ(ty)+cy, bw=pw*tw, bh=ph*th)。
如下图所示,这样看,是不是真的把预测目标检测的任务,给拆分成两个阶段分段的来进行预测的呢?更多内容推荐阅读这里:一文读懂Faster RCNN
1.2、训练和验证阶段
其实,要理解faster RCNN的整理工作方式,需要区分成训练阶段train 和推理阶段inference,区别对待。
先说简单的推理阶段inference。
推理阶段与训练阶段最大的不同,就是推理阶段没有金标准target, 也就没有计算损失,更没有办法更新网络模型:
backbone的特征提取阶段,接触不到target,所以这个阶段没有损失值,两个阶段都是一样的,就是负责把输入图像,转成特征图;- RPN阶段就不同了,因为这个阶段是要为最后的分类,提供proposal的。这个proposal需要引入anchor box,所有的proposal都会被传入ROI Pooling层进行分类和回归;
- 在ROI Head阶段,RPN推荐的proposal会经过ROI Pooling层,调整到统一大小,例如7x7。经过两个fc层,输出具体的类别+背景,和坐标框。
- RPN阶段返回的proposal相互之间是高度重叠的,采用了NMS降低数量。
然后是训练阶段train。
训练阶段就要计算损失了,就要更新模型了,这块都是与推理阶段不一样的:
- backbone的特征提取阶段,一样;
- RPN阶段就不同了,因为这个阶段,需要区分
positive还是negative。咋知道这个anchor是阳性,还是阴性呢?那就需要使用标记target进行区分。在这个阶段,有了IOU,就是PD与GT计算IOU。如何区分阳性还是阴性呢?
IOU值大于0.7的是阳性,IOU值小于0.3的是阴性,其他丢弃掉;
we randomly sample 256 anchors in an image to compute the loss function of a mini-batch, where the sampled positive and negative anchors have a ratio of up to 1:1. If there are fewer than 128 positive samples in an image, we pad the mini-batch with negative ones.
上段部分来自于论文:Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks 的Training RPNs部分。
翻译过来的意思就是:在RPN阶段计算一个mini batch的loss function时候,我们随机的在一张图片中选择256个anchor,阳性和阴性的样本比例1:1。如果一种图片中的阳性anchor少于128个,就用negative补上。
- 此时,RPN阶段的损失,也是由
2分之一(0.5)的positive和2分之1的negative组成的,参与损失计算,包括阳性or阴性类别损失和位置偏移损失; - 最后,在
ROI Head阶段,输出具体的类别,和坐标框,这两块都要参与到损失的计算,比较的好理解。 - NMS在训练阶段,不参与。(我理解是因为在训练阶段,NMS会去除掉很多的正样本,使得正负样本就更加的不均衡了)
在训练阶段,会有哪些损失值?
-
RPN 损失函数:在 RPN 阶段,会使用 RPN 模型生成一系列 anchor,并根据这些 anchor 来进行目标检测。RPN 损失函数一般包括两个部分:分类损失(交叉熵损失)和回归损失(Smooth L1 )。分类损失用于判断 anchor 是否为前景(即是否包含目标),回归损失用于精确预测目标的位置。 -
Fast R-CNN (ROI Head)损失函数:在 Fast R-CNN 阶段,会使用 RoI Pooling 对 RPN 生成的 proposal 进行特征提取,并对提取的特征进行分类和回归。Fast R-CNN 损失函数同样包括分类损失和回归损失。 -
总损失函数:在训练过程中,RPN 和 Fast R-CNN 的损失函数需要同时进行优化。因此,一般会将 RPN 和 Fast R-CNN 的损失函数合并为一个总损失函数(当然,也可以分别进行回归调整),并使用反向传播算法来进行优化。
两个阶段的位置损失都是 Smooth L1,同样一个位置,为啥需要计算两次损失呢?然后回归两次位置呢?
-
RPN 阶段和 Fast R-CNN 阶段中的位置都是反映在原图上的同一块像素区域,都是表示物体的位置偏移量。
-
对于RPN阶段,先对anchor进行一次位置回归,得到一组粗略的预测框,再利用这些预测框去RoI pooling得到RoI,最后对RoI进行第二次位置回归,得到最终的目标框位置。
-
在 RPN 阶段中,每个 anchor 与其对应的 ground-truth bbox 之间的位置偏移量会被计算,并通过 Smooth L1 损失函数来度量它们之间的差异。这个损失函数的计算仅涉及到对 anchor 的位置回归。
-
在 Fast R-CNN 阶段中,由于每个 RoI 的形状都是不同的,所以每个 RoI 与其对应的 ground-truth bbox 之间的位置偏移量也需要被计算,并通过 Smooth L1 损失函数来度量它们之间的差异。这个损失函数的计算涉及到对 RoI 的位置回归。
-
因此,Faster R-CNN 中需要计算两次位置损失,是因为两个阶段都需要对物体的位置进行回归。需要注意的是,这两个阶段的位置回归所针对的对象是不同的:
- RPN 阶段中的位置回归是针对 anchor 的;
- 而 Fast R-CNN 阶段中的位置回归是针对 RoI 的。
-
两次位置回归的目的都是为了使目标框的位置预测更加准确。
1.2、RCNN、fast RCNN、faster RCNN横评
1. RCNN(Region-based Convolutional Neutal Network)
- 目标框的获取方式:select search(选择性搜索算法)来生成候选区域,从原图裁剪出ROIs
- 分类方式:SVM
- 目标位置:bounding-box regressor
缺点:
- 训练是多阶段的:先fine tunes目标proposal;再训练SVM分类器;再训练bounding box回归器
- 训练再内存空间和时间上开销大:分阶段训练,不同阶段的输出需要写入内存
- 目标检测很慢
2. fast RCNN
- 目标框的获取方式:input image和region of interest(ROIs)在特征层阶段相遇、裁剪,经过RoI max pooling,调整成一致尺寸(学习了SPP Net,例如7x7大小),送入fully convolutional network.
- 分类方式:分类分支,经过softmax输出类别,
- 目标位置:Bbox regressor输出位置偏移
缺点:候选区域的生成仍然采用选择性搜索算法,速度仍有提升空间
3. faster RCNN
- 目标框的获取方式:基于anchor base的RPN阶段,用于输出候选的proposal,和特征层相遇、经过
RoI max pooling,调整成一致尺寸,送入fully convolutional network. - 分类方式:分类分支,经过
softmax输出类别, - 目标位置:
Bbox regressor输出位置偏移
二、one stage
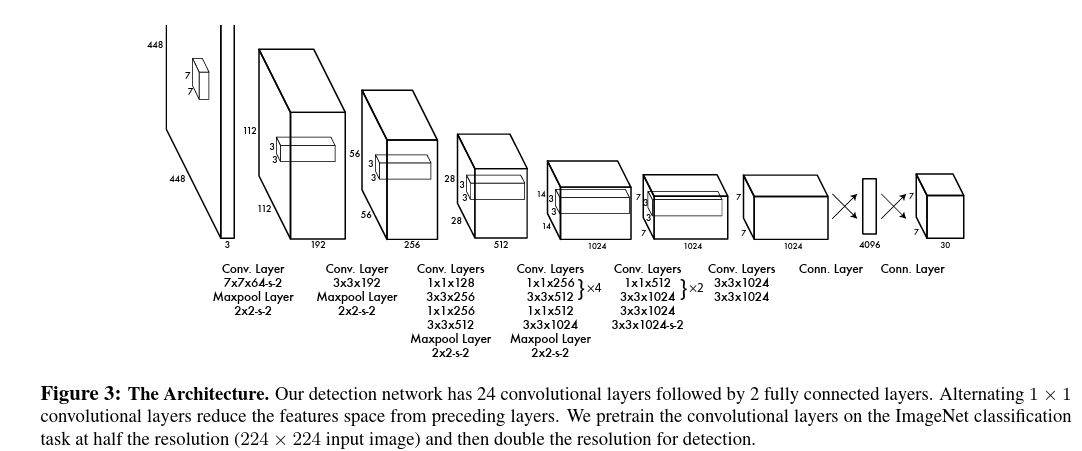
one stage的开山之作yolo v1(论文地址:you only look once)。其中下面是一张网络模型的简图,可以看到:
- 输入图像,经过一连串的卷积层操作
(24 convolutional layers),得到了一个channel=1024维的向量; - 得到下采样特征图后,连接
2个 fully connected layers。 - 直接得到预测输出的
output,大小是:7x7x30,S ×S×(B∗5+C) tensor。For evaluating YOLO on PASCAL VOC, we use S = 7, B =2. PASCAL VOC has 20 labelled classes so C = 20. Our final prediction is a 7 × 7 × 30 tensor.
可以看出来,yolo v1将目标检测问题,转化为了回归问题。把中间网络模型学习做的事情,都当做了一个黑箱,就是输入图像,输出目标。具体中间网络是如何办到的?这个不管,全部交由网络模型的监督信号,自己拟合。
2.1、训练和验证阶段
要理解单阶段YOLO V1的整体工作方式,需要区分成训练阶段train 和推理阶段inference,区别对待。
训练阶段train:
损失函数定义如下:
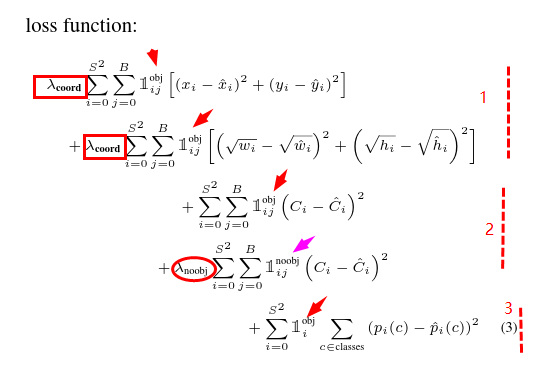
要想要看到上面的损失函数公式,首先要了解这些字母,都表示是什么?其中:
- S, grid cell size,论文里面是7
- B, bounding box个数,论文里面是2
- x, y, w, h, 分别表示bounding box的中心点坐标,和宽、高
- C, Confidence,是否有目标的概率
- p, Pr(Classi|Object),有目标下类别的条件概率
- obj,noobj,表示有物体的权重和没有物体
- λcoord = 5 ,λnoobj = .5,有物体的权重和没有物体的权重
每两项之间,都是算距离的,都是按照回归的方式进行求损失的。其他的建议参考这里:YOLO(You Only Look Once)算法详解
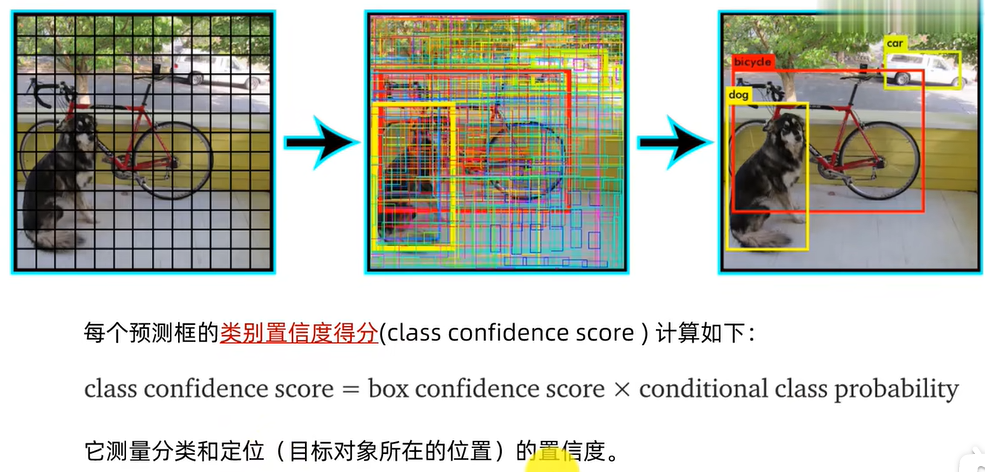
在inference阶段,步骤如下:
- 对于输入图像,
resize为一个正方形(416x416) - split the image into grid,大小为7x7
- 每一个grid cell 都预测B各bounding box框,论文里面B=2
- 每一个grid cell 只预测一个类。B=2两个网格,那一个grid cell就是2个网格,两个类
- 每一个bounding box框,有
4个位置参数(x_c,y_c,w,h)和1个置信度P(Object),表示有物体的概率,用于区分存在目标物体,还是背景 - 到这里,就有了
7x7x2=98个bounding box框,每一个框都包含5个参数(x_c,y_c,w,h,confidence) - 每个bounding box框的中心点,都在对应的grid cell像素内。一个grid cell预测2个bounding box,就是10个参数,再加上目标条件概率20个类,每一个类都有一个
条件概率P(Car|Object)。在该阶段,最后对应类的概率=P(Car|Object) x P(Object)。 - 这样一个grid cell对应的输出向量就是
2x5+20=30个。再加上一张输入图像被划分为7x7个grid cell,最后的输出就是7x7x30个张量大小。 - 至此,我们就预测得到了一堆框框,个数是7x7x2=98。最后经过NMS,去掉用于的框,得到最终的预测结果。
(在没有理解清楚这段之前,我一直在疑惑:
为什么2个bounding box已经有了一个概率,这个概率是什么?后面20个类,是可以区分具体这个bounding
box属于哪个类的,他们之间又是什么关系。不知道你到这里,是否理解清楚了)
这块视频详解,参考这里:【精读AI论文】YOLO V1目标检测,看我就够了-同济子豪兄
一步到位,没有two stage的先预测出前景还是背景,然后在预测具体类别的过程,简化了很多,端到端的过程。
YOLO v1算法的缺点:
1、位置精确性差,对于小目标物体以及物体比较密集的也检测不好(grid cell的原因,因为只能预测98个框),比如一群小鸟。
2、YOLO虽然可以降低将背景检测为物体的概率,但同时导致召回率较低。
2.2、YOLOv1、 YOLOv2、 YOLOv3、横评
YOLOv2 进行了许多改进,包括以下几个方面:
- 使用 batch normalization:YOLOv2 在卷积层后加入 Batch Normalization,可以加速训练,提高模型的精度和鲁棒性。
- 改进网络结构:YOLOv2 采用了更深的网络结构,引入了残差网络(ResNet)的结构,和NIN结构,增加了网络层数
- anchor boxes: 替代了之前的固定网格grid cell来提高物体检测的精度,kmean聚类确定anchor尺寸。
- passthrough layer 细粒度特征
- 采用了多尺度训练和预测: 引入了多尺度训练方法,可以提高模型对不同尺度物体的检测能力。(不同于FPN,他是在训练阶段每10个batch,会重新选择一个新的图像尺寸,包括{320,352,…,608}等等32倍数的尺寸)
YOLOv3 的改进主要集中在以下几个方面:
- 使用了更深的 Darknet-53 网络:YOLOv3 使用了一个名为 Darknet-53 的更深的卷积神经网络,相较于之前的 Darknet-19 网络,它具有更强的特征提取能力,可以提高目标检测的准确性。
- 引入了 FPN 特征金字塔:YOLOv3 引入了 FPN(Feature Pyramid Network)特征金字塔,可以利用不同层级的特征信息进行目标检测(predicts boxes at 3 different scales. predict 3 boxes at each scale),从而提高检测的准确性。
3.使用更多的 Anchor Boxes:YOLOv3 使用了更多的 Anchor Boxes,可以更好地适应不同大小和形状的目标物体,依旧使用 k-means clustering。 - 首次binary cross-entropy loss 用于分类
yolo v3之后,作者就不在更新YOLO系列了,再之后的改版,都是其他人或者团队继续更新的。YOLOv5再YOLOv4更新的没多久就出来了,且是pytorch的开源代码,所以相比于YOLOv4的C版本,受众更多。
YOLOv5 (没有论文)的改进主要集中在以下几个方面:
- 自适应anchor:在训练模型时,YOLOv5 会自己学习数据集中的最佳 anchor boxes,而不再需要先离线运行 K-means 算法聚类得到 k 个 anchor box 并修改 head 网络参数。总的来说,YOLOv5 流程简单且自动化了。
- 自适应图片缩放(letterBox)
- Focus结构
结构图:
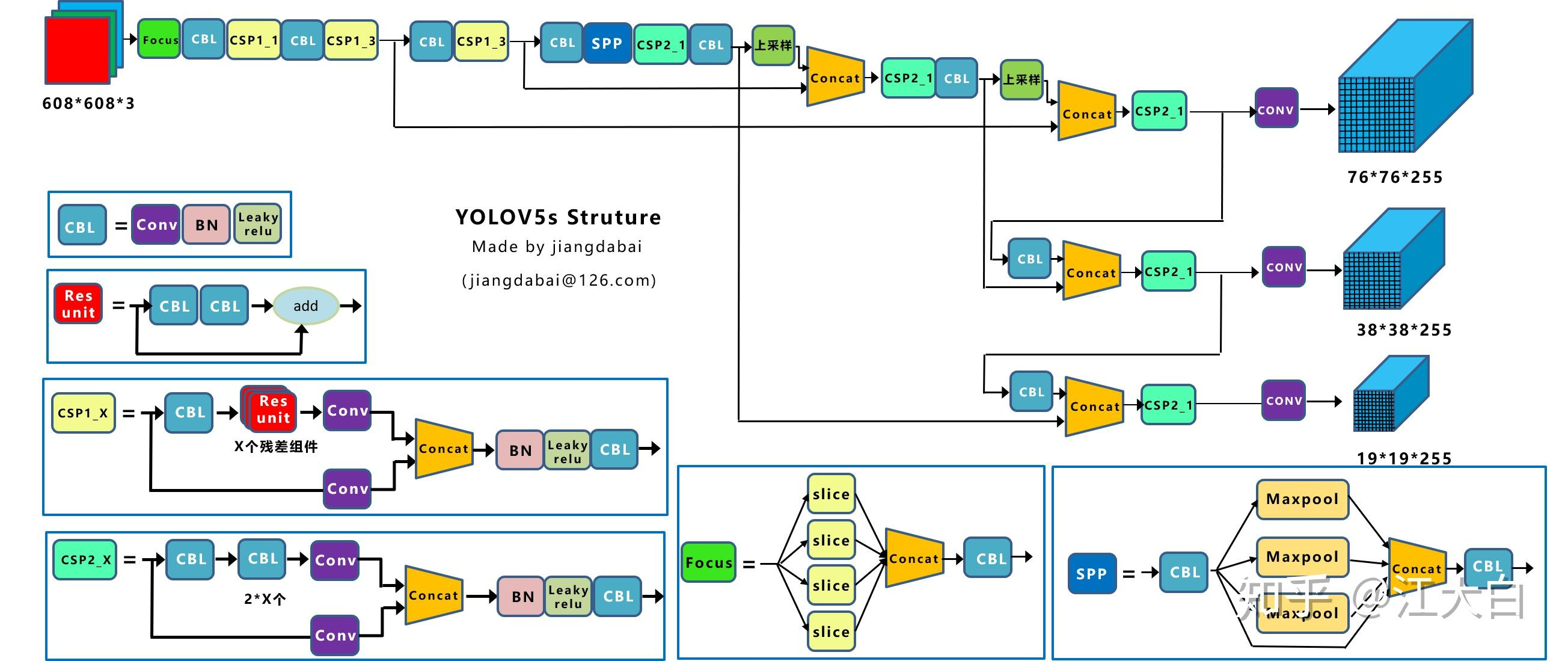
Focus结构中:
- 原始的640 × 640 × 3的图像输入Focus结构,采用切片操作。
- 具体操作是在一张图片中每隔一个像素拿到一个值,类似于邻近下采样。
- 将一个channel上,W、H信息就集中到了通道空间,输入通道扩充了4倍;RGB 3个通道,就变成了12个channel。
- 先变成320 × 320 × 12的特征图,再经过一次卷积操作,最终变成320 × 320 × 32的特征图。
- 最终得到了没有信息丢失情况下的二倍下采样特征图。
- 目的是:减少传统下采样带来的信息损失。
- 切片操作如下:
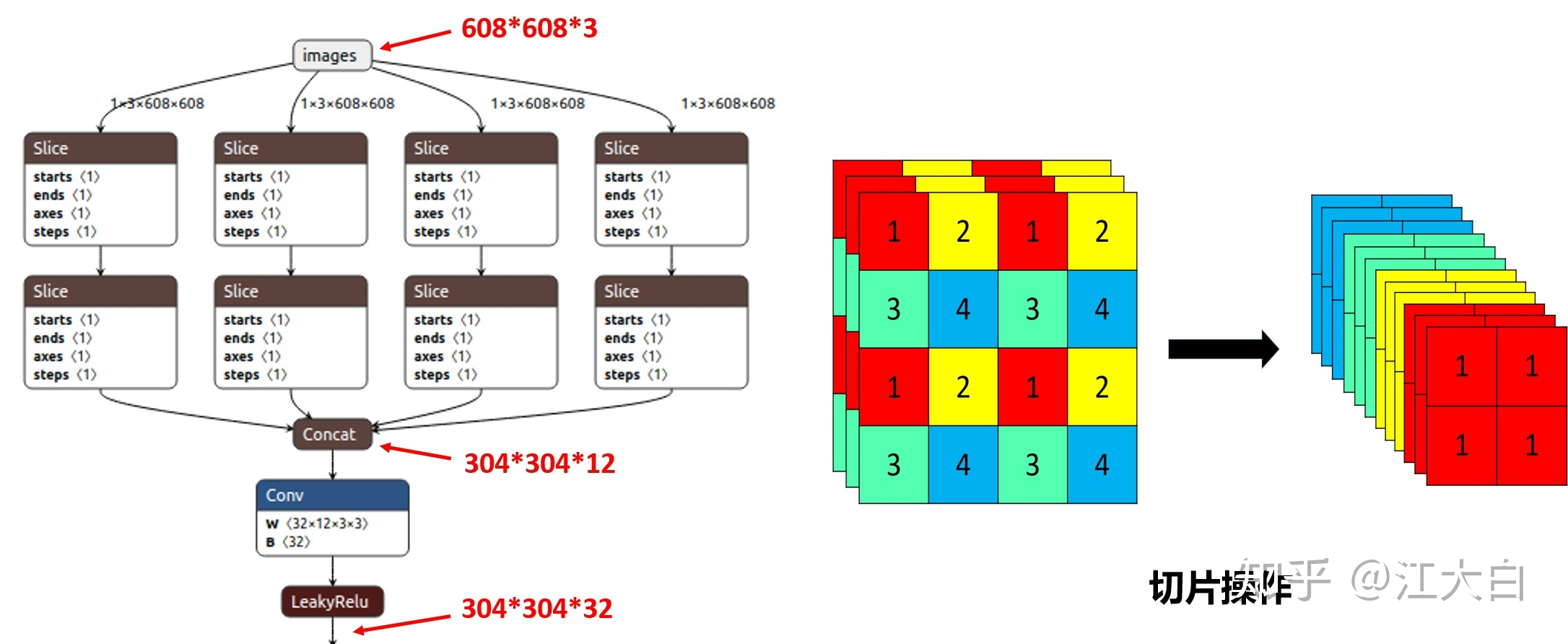
详尽内容建议参考这里:yolov5中的Focus模块的理解
YOLOv5 4个大结构,分别是:
8. 输入端:Mosaic数据增强(对于小目标的检测效果好)、cutMix、MixUP。自适应锚框计算、自适应图片缩放
9. Backbone:Focus结构(slice切片操作,把高分辨率的图片(特征图)拆分成多个低分辨率的图片/特征图,即隔列采样+拼接,可以减少下采样带来的信息损失),CSP结构
10. Neck:FPN+PAN结构
11. Prediction:GIOU_Loss
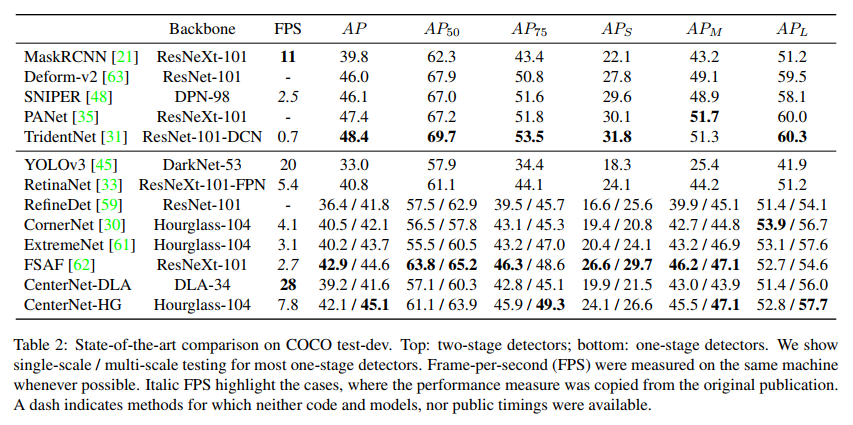
三、性能对比
下面是在论文centerNet中,作者对普遍常用的目标检测、分割模型做了次系统的测试。其中,上部分是two stage的主要算法,下部分是one stage的主要算法。可以发现:
FPS帧率这块,one stage都是相对比较快的,尤其是yolo系列。two stage就慢了很多。- two stage的
AP就比较的高,最高能到48.4,低的也有46,而one stage的就比较低,最高才45。尤其是TridentNet,几乎是这些里面,各个领域都是最佳的。
四、总结
到这里,目标检测中one-stage、two-stage算法的内容基本上就结束了。但是,面试官是不会罢休的,他会沿着目标检测算法,继续深入展开,比如:
anchor base(anchor boxes)和anchor free分别是什么?有什么区别和优缺点?faster RCNN的ROI Pooling和mask RCNN的ROI Align分别是什么?有什么有缺点?yolo的损失函数式什么?faster RCNN的损失函数又是什么?- 等等
所以说,目标检测是深度学习领域的一个重点,能够考察的内容很多,主要还是因为在各个企业里面,这块的内容,是真实可以落地的。所以,这块内容是真要吃透。
(上文内容,比较的丰富,和比较的杂。是根据论文和一些网络资料综合记录的。如果你对其中的内容,存在异议或需要纠正的地方,欢迎评论区留言,一起进步,谢谢)