如果点集之间不存在缩放关系时(即尺度相同时), 可以用经典ICP( Iterative Closest Point )方法求解得到旋转矩阵R和平移向量t来进行点集对齐。
如果存在缩放关系时,首先估计出点集S1和S2之间的缩放倍数s, 我们就可以利用ICP算法求解。
一、尺度因子s是两个点集中线段长度的比值
配准两组三维点集合步骤[参考]:
1.1 求解尺度因子s
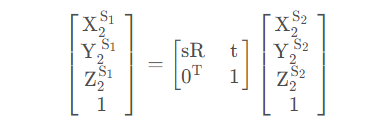
①找到一个相似变换矩阵:

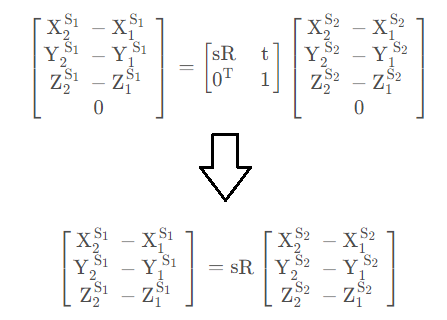
②找到点集S1和S2匹配好的一对点,做变换:

③再找另外一对3D-3D匹配点,做变换:
④让以上两个公式相减:
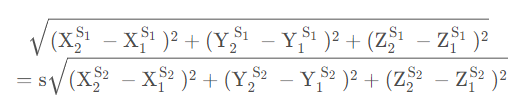
⑤对上式两边取模值(因为旋转矩阵R不影响向量长度):
⑥计算得到 尺度因子s:
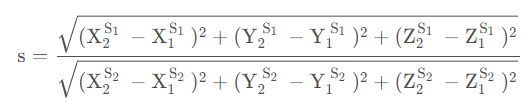
物理含义是: 两个点集的"形状"相同, 在两个点集中分别找到一条对应的线段, 线段长度的比值就是这两个点集的缩放倍数。(该方法对于要配准的两个点云形状要求比较严格)
1.2 ICP求解
尺度放缩后的点云进行配准,就相当于刚体变换,可以直接适用ICP算法。