文章目录
- 0. 前言
- 0.1 读本文前的必备知识
- 1. LSTM架构
- 2. LSTM正向传播代码实现
- 2.1 隐藏层正向传播
- 2.2 输出层正向传播
- 3. LSTM反向传播代码实现
- 3.1 输出层反向传播
- 3.2 隐藏层反向传播
- 4. 实例应用说明
- 5. 运行结果
- 6. 后记
- 6 完整代码
0. 前言
按照国际惯例,首先声明:本文只是我自己学习的理解,虽然参考了他人的宝贵见解,但是内容可能存在不准确的地方。如果发现文中错误,希望批评指正,共同进步。
本篇文章的宗旨是:通过从零构建LSTM模块,并且应用于实例问题中来加深对LSTM(长短期记忆)神经元网络模型的学习及理解。
RNN与其他常见的神经元网络模型(FNN、CNN、GAN)相比,其数学算法底层是最为复杂的,而LSTM作为RNN的改进变体之一,把这个算法的复杂程度又提升了一个层次。因此有必要仔细学习下LSTM的算法及代码实现过程,以便能加强对LSTM的掌握程度以及做出更底层的算法创新。
0.1 读本文前的必备知识
- 本篇文章是 基于Numpy构建RNN模块并进行实例应用(附代码)的姊妹篇。如果对RNN的底层算法实现不太了解,非常建议先学习下RNN的内容,否则很难看懂本篇文章;
- LSTM(长短期记忆)网络的算法介绍及数学推导 介绍了LSTM的底层数学算法(如果对于其数学推导过程难以理解,那只要知道其推导结果也可以),本文侧重是基于NumPy来从零构建LSTM,对于LSTM正向反向传播的数学公式会稍微带过。
1. LSTM架构
其实这一块CSDN上有很多的介绍文章,以及colah的著名博客 Understanding LSTM Networks 都已经把LSTM的架构说的很明白了。但是我在编码的时候遇到了一些实际问题,所以还是把这块认真梳理一遍:
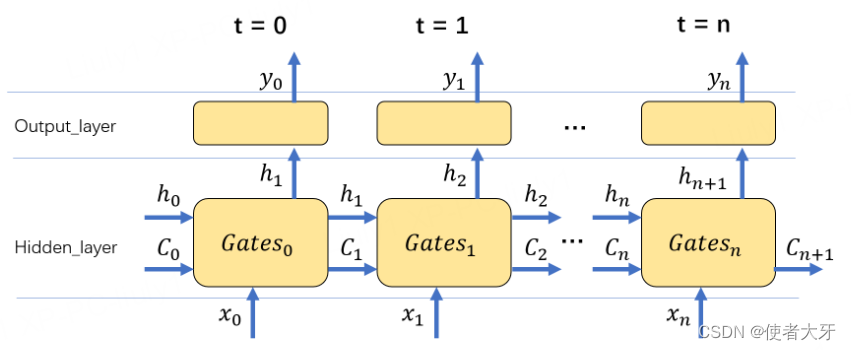
上面这个原理图说明了从0时刻到n时刻LSTM网络正向传播的过程,需要注意各个变量在每个时刻的序列,后面编码要严格按照这个序列进行。
细心的你或许已经发现这里把最后一个时刻输出的细胞状态 C n + 1 C_{n+1} Cn+1也标了出来,后面也会说明这是因为在反向传播计算损失E对 C n C_{n} Cn的偏导数时,需要使用到损失E对 C n + 1 C_{n+1} Cn+1的偏导数进行反向迭代传播。
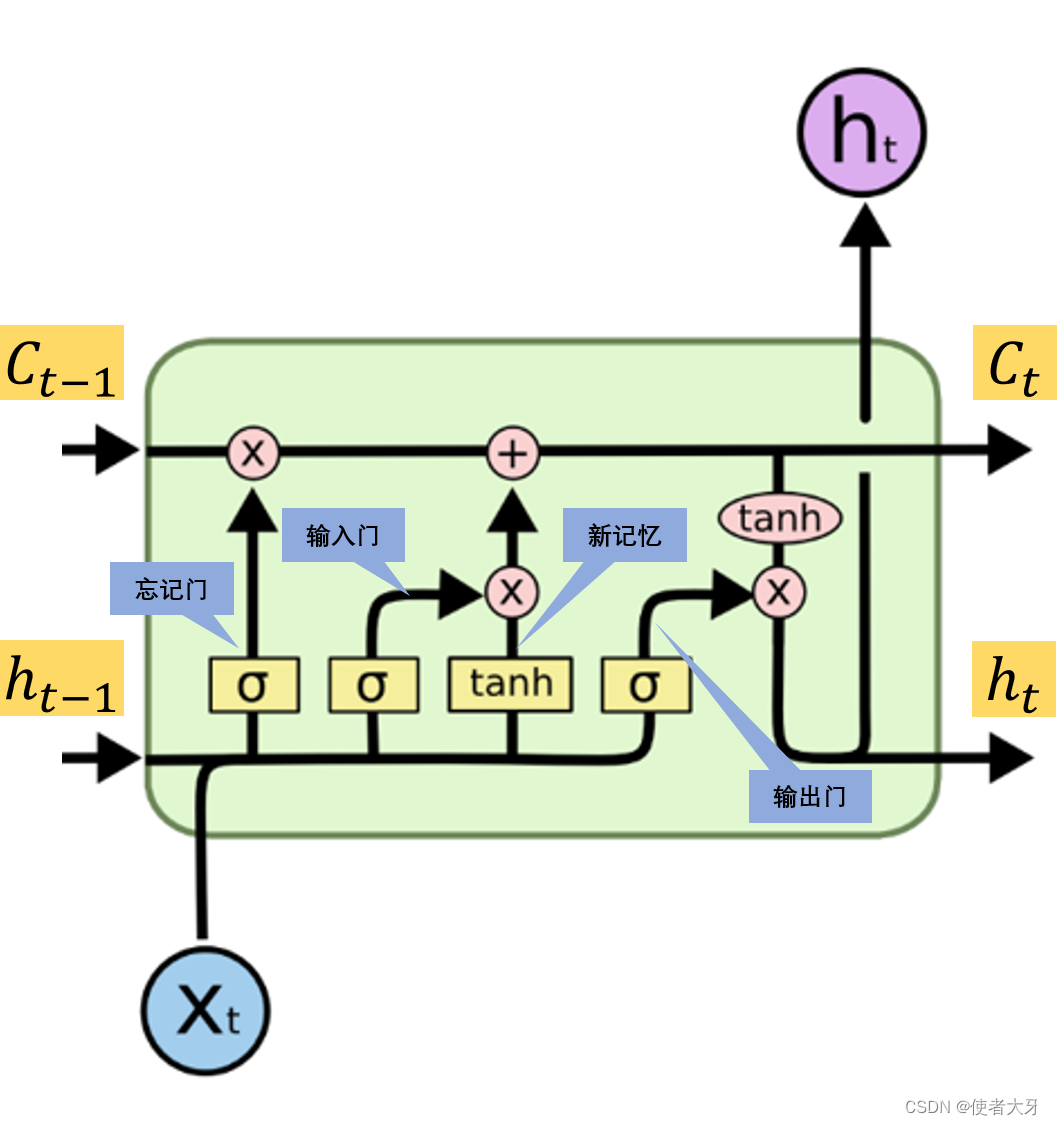
在LSTM内部的参数传递,仍然参照下面的原理图。
2. LSTM正向传播代码实现
正向传播都没有什么难度,只要严格按照上面的原理图进行即可
2.1 隐藏层正向传播
t t t时刻各个门为:
- 忘记门: f t = σ ( w f ⋅ x t + v f ⋅ h t − 1 + b f ) f_t = \sigma(w_f·x_t+v_f·h_{t-1}+b_f) ft=σ(wf⋅xt+vf⋅ht−1+bf)
- 输入门: i t = σ ( w i ⋅ x t + v i ⋅ h t − 1 + b i ) i_t = \sigma(w_i·x_t+v_i·h_{t-1}+b_i) it=σ(wi⋅xt+vi⋅ht−1+bi)
- 新记忆门: g t = t a n h ( w g ⋅ x t + v g ⋅ h t − 1 + b g ) g_t = tanh(w_g·x_t+v_g·h_{t-1}+b_g) gt=tanh(wg⋅xt+vg⋅ht−1+bg)
- 输出门: o t = σ ( w o ⋅ x t + v o ⋅ h t − 1 + b o ) o_t = \sigma(w_o·x_t+v_o·h_{t-1}+b_o) ot=σ(wo⋅xt+vo⋅ht−1+bo)
t t t时刻的细胞状态 C t C_t Ct为:
C t = f t ⨀ C t − 1 + i t ⨀ g t C_t = f_t \bigodot C_{t-1} + i_t \bigodot g_t Ct=ft⨀Ct−1+it⨀gt
t t t时刻的隐层输出 h t h_t ht为:
h t = o t ⨀ t a n h ( C t ) h_t = o_t \bigodot tanh(C_t) ht=ot⨀tanh(Ct)
代码实现:
def forward(self, x, h_pre, c_pre): #h_pre为h_t-1, c_pre为c_t-1
self.Fgate = sigmoid(np.dot(self.w_f, x) + np.dot(self.v_f, h_pre) + self.b_f)
self.Igate = sigmoid(np.dot(self.w_i, x) + np.dot(self.v_i, h_pre) + self.b_i)
self.Ggate = np.tanh(np.dot(self.w_g, x) + np.dot(self.v_g, h_pre) + self.b_g)
self.Ogate = sigmoid(np.dot(self.w_o, x) + np.dot(self.v_o, h_pre) + self.b_o)
c_cur = self.Fgate * c_pre + self.Igate * self.Ggate #c_cur为c_t
h_cur = self.Ogate * np.tanh(c_cur)
return h_cur, c_cur
这里可以通过多维列表节省一些代码行数,这里为了更清晰表明各个门,全部拆开来写。
2.2 输出层正向传播
t t t时刻的最终输出为:
y t = w h ⋅ h t + b h y_t = w_h·h_t + b_h yt=wh⋅ht+bh
输出层的正向传播公式一般写为 y t = s o f t m a x ( w h ⋅ h t + b h ) y_t = softmax(w_h·h_t + b_h) yt=softmax(wh⋅ht+bh),这里能把softmax去掉就相当于把要学习的数据进行了一次逆softmax操作。
代码实现:
def forward(self, h_cur): #h_cur为 h_t
return np.dot(self.w_h, h_cur) + self.b_h
3. LSTM反向传播代码实现
整个代码的难度都在反向传播这里。
3.1 输出层反向传播
这里损失的计算方式选用MSE(均方误差)来用代码实现,即 E = 0.5 ∗ ( y − y t r a i n ) 2 E = 0.5*(y - y_{train})^2 E=0.5∗(y−ytrain)2。
这里前面增加一个0.5的系数是为了求导数时和平方项“2”抵消。
代码实现:
def backward(self,y,h_cur, train_data):
delta = y - train_data
self.grad_wh = np.dot(delta, h_cur.T)
self.grad_hcur = np.dot(self.w_h.T, delta)
self.grad_bh = delta
在这段代码中,除了计算了损失 E E E对权重 w h w_h wh和 b h b_h bh的偏导,也对 h h h的偏导做了计算,这个会用于后面隐藏层权重偏导的计算。
3.2 隐藏层反向传播
这是整个LSTM算法中最核心、最难的部分。
在隐藏层的反向传播中,最关键的中间变量即是损失
E
E
E对细胞状态
C
t
C_t
Ct的偏导:

推导过程请见: LSTM(长短期记忆)网络的算法介绍及数学推导
式中 ∂ E ∂ C t \frac{\partial E}{\partial C_t} ∂Ct∂E通过下一时刻的 ∂ E ∂ C t + 1 \frac{\partial E}{\partial C_{t+1}} ∂Ct+1∂E迭代计算得出,这就要求在实际编码的时候增加一个变量存储每个时刻的 ∂ E ∂ C t \frac{\partial E}{\partial C_t} ∂Ct∂E。
而 ∂ E ∂ h t \frac{\partial E}{\partial h_t} ∂ht∂E也是要通过迭代得出的,在 t t t时刻可以计算出 ∂ E ∂ h t − 1 \frac{\partial E}{\partial h_{t-1}} ∂ht−1∂E,这个值也要存储起来,用于 t − 1 t-1 t−1时刻的反向传播计算用。
代码实现:
def backward(self, Fgate, Igate, Ggate, Ogate, x, grad_cnext, Fgate_next, grad_hcur, c_cur,c_pre, h_pre):
self.grad_ccur = grad_cnext * Fgate_next + grad_hcur * Ogate * (1 - np.tanh(c_cur) * np.tanh(c_cur))
self.grad_hpre = self.grad_ccur*(np.dot(self.v_f.T, c_pre*Fgate*(1-Fgate)) + np.dot(self.v_g.T,Igate*(1-Ggate*Ggate)) + np.dot(self.v_i.T,Ggate*Igate*(1-Igate)))
self.grad_wf = np.dot(self.grad_ccur * c_pre * Fgate * (1 - Fgate), x.T) #这里要注意矩阵的转置!!!
self.grad_wi = np.dot(self.grad_ccur * Ggate * Igate * (1 - Igate), x.T)
self.grad_wg = np.dot(self.grad_ccur * Igate * (1 - Ggate * Ggate), x.T)
self.grad_wo = np.dot(grad_hcur*np.tanh(c_cur)*Ogate*(1-Ogate),x.T)
self.grad_vf = np.dot(self.grad_ccur * c_pre * Fgate * (1 - Fgate), h_pre.T)
self.grad_vi = np.dot(self.grad_ccur * Ggate * Igate * (1 - Igate), h_pre.T)
self.grad_vg = np.dot(self.grad_ccur * Igate * (1 - Ggate * Ggate), h_pre.T)
self.grad_vo = np.dot(grad_hcur * np.tanh(c_cur) * Ogate * (1 - Ogate), h_pre.T)
self.grad_bf = self.grad_ccur * c_pre * Fgate * (1 - Fgate)
self.grad_bi = self.grad_ccur * Ggate * Igate * (1 - Igate)
self.grad_bg = self.grad_ccur * Igate * (1 - Ggate * Ggate)
self.grad_bo = grad_hcur * np.tanh(c_cur) * Ogate * (1 - Ogate)
4. 实例应用说明
本实例应用是拟合
y
=
x
2
y = x^2
y=x2曲线,训练组输入数据train_x为0~1等间距取600个数据,每6个数据为1组,即100组数据。输出数据train_y为train_x的平方再加上一个随机噪声数据。
代码实现:
train_x = np.linspace(0.01,1,600).reshape(100,6,1)
train_y = train_x * train_x + np.random.randn(100,6,1)/200
5. 运行结果
设定迭代次数epoch都为5000,选取不同的学习速率learning rate的模型学习过程如下(其中蓝色点为训练组数据,黄色点为网络模型输出数据):

6. 后记
首先感谢能看到这里,整篇文章我陆陆续续编码+debug写了一个月,主要是隐藏层的反向传播部分确实不太好计算。在之前做LSTM数学推导时,我立了一个flag要用Python实现LSTM,也算是填了之前挖的坑,但是万万没想到LSTM的代码实现比RNN还要复杂的多。
而且在代码运行的时候非常容易发生计算溢出的问题: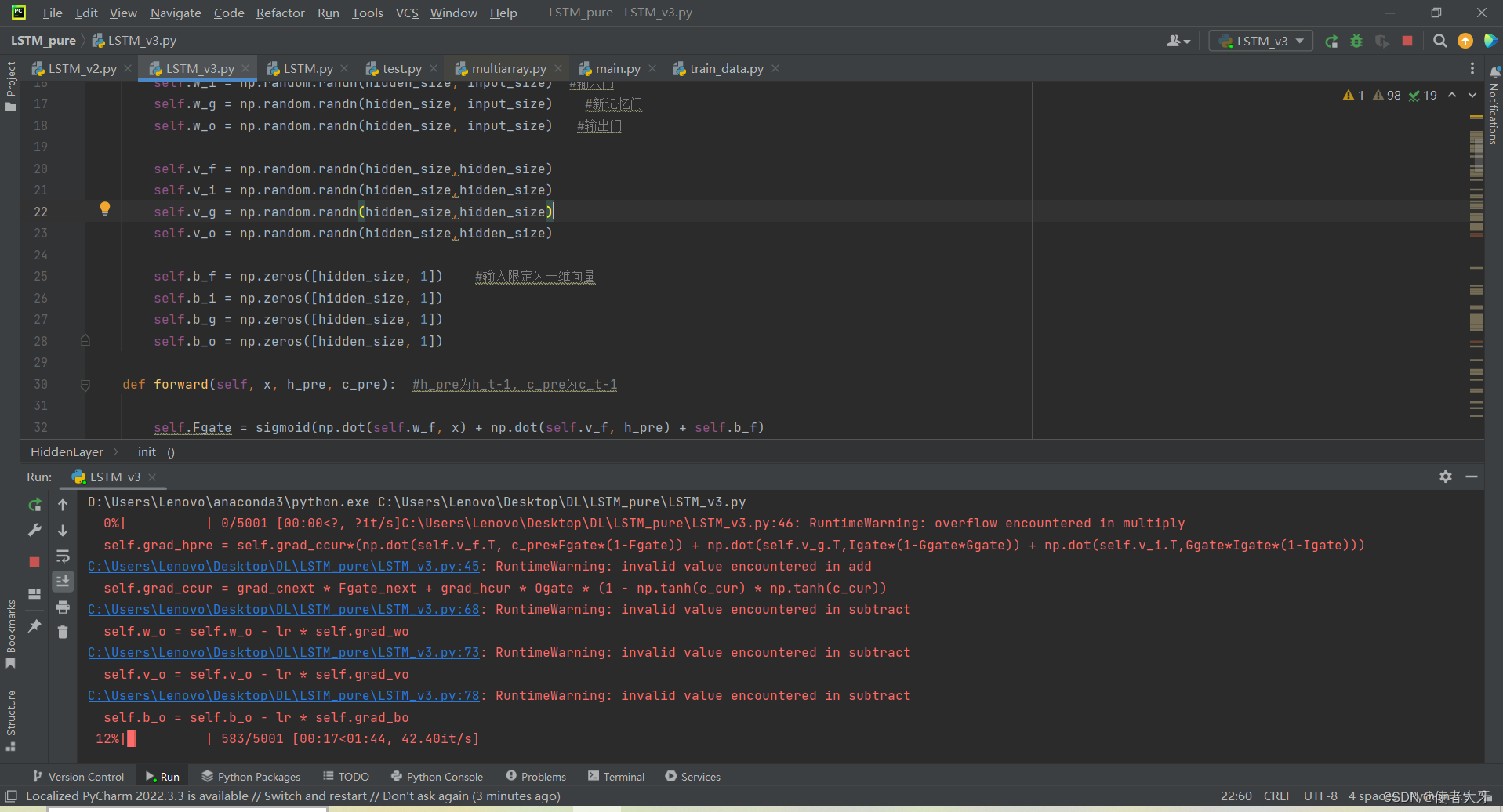
这种情况的输出肯定都是NaN,为此我尝试了很多解决方法都不灵,只能重新运行,期待下次计算不会溢出。
计算溢出的原因是梯度爆炸,梯度爆炸的原因我猜测是LSTM对权重的初始值有所“挑剔”,这个猜测的理由是代码运行只要顺利通过第一个epoch,后面便没问题了。
6 完整代码
import numpy as np
from tqdm import tqdm
import matplotlib.pyplot as plt
train_x = np.linspace(0.01,1,600).reshape(100,6,1)
train_y = train_x * train_x + np.random.randn(100,6,1)/200
def sigmoid(x):
return 1/(1+np.exp(-x))
class HiddenLayer():
def __init__(self,input_size, hidden_size):
self.w_f = np.random.randn(hidden_size, input_size) #定义各个门的权重, 忘记门
self.w_i = np.random.randn(hidden_size, input_size) #输入门
self.w_g = np.random.randn(hidden_size, input_size) #新记忆门
self.w_o = np.random.randn(hidden_size, input_size) #输出门
self.v_f = np.random.randn(hidden_size,hidden_size)
self.v_i = np.random.randn(hidden_size,hidden_size)
self.v_g = np.random.randn(hidden_size,hidden_size)
self.v_o = np.random.randn(hidden_size,hidden_size)
self.b_f = np.zeros([hidden_size, 1]) #输入限定为一维向量
self.b_i = np.zeros([hidden_size, 1])
self.b_g = np.zeros([hidden_size, 1])
self.b_o = np.zeros([hidden_size, 1])
def forward(self, x, h_pre, c_pre): #h_pre为h_t-1, c_pre为c_t-1
self.Fgate = sigmoid(np.dot(self.w_f, x) + np.dot(self.v_f, h_pre) + self.b_f)
self.Igate = sigmoid(np.dot(self.w_i, x) + np.dot(self.v_i, h_pre) + self.b_i)
self.Ggate = np.tanh(np.dot(self.w_g, x) + np.dot(self.v_g, h_pre) + self.b_g)
self.Ogate = sigmoid(np.dot(self.w_o, x) + np.dot(self.v_o, h_pre) + self.b_o)
c_cur = self.Fgate * c_pre + self.Igate * self.Ggate #c_cur为c_t
h_cur = self.Ogate * np.tanh(c_cur)
return h_cur, c_cur
def backward(self, Fgate, Igate, Ggate, Ogate, x, grad_cnext, Fgate_next, grad_hcur, c_cur,c_pre, h_pre):
self.grad_ccur = grad_cnext * Fgate_next + grad_hcur * Ogate * (1 - np.tanh(c_cur) * np.tanh(c_cur))
self.grad_hpre = self.grad_ccur*(np.dot(self.v_f.T, c_pre*Fgate*(1-Fgate)) + np.dot(self.v_g.T,Igate*(1-Ggate*Ggate)) + np.dot(self.v_i.T,Ggate*Igate*(1-Igate)))
self.grad_wf = np.dot(self.grad_ccur * c_pre * Fgate * (1 - Fgate), x.T) #这里要注意矩阵的转置!!!
self.grad_wi = np.dot(self.grad_ccur * Ggate * Igate * (1 - Igate), x.T)
self.grad_wg = np.dot(self.grad_ccur * Igate * (1 - Ggate * Ggate), x.T)
self.grad_wo = np.dot(grad_hcur*np.tanh(c_cur)*Ogate*(1-Ogate),x.T)
self.grad_vf = np.dot(self.grad_ccur * c_pre * Fgate * (1 - Fgate), h_pre.T)
self.grad_vi = np.dot(self.grad_ccur * Ggate * Igate * (1 - Igate), h_pre.T)
self.grad_vg = np.dot(self.grad_ccur * Igate * (1 - Ggate * Ggate), h_pre.T)
self.grad_vo = np.dot(grad_hcur * np.tanh(c_cur) * Ogate * (1 - Ogate), h_pre.T)
self.grad_bf = self.grad_ccur * c_pre * Fgate * (1 - Fgate)
self.grad_bi = self.grad_ccur * Ggate * Igate * (1 - Igate)
self.grad_bg = self.grad_ccur * Igate * (1 - Ggate * Ggate)
self.grad_bo = grad_hcur * np.tanh(c_cur) * Ogate * (1 - Ogate)
def step(self, lr=0.01):
self.w_f = self.w_f - lr * self.grad_wf
self.w_i = self.w_i - lr * self.grad_wi
self.w_g = self.w_g - lr * self.grad_wg
self.w_o = self.w_o - lr * self.grad_wo
self.v_f = self.v_f - lr*self.grad_vf
self.v_i = self.v_i - lr * self.grad_vi
self.v_g = self.v_g - lr * self.grad_vg
self.v_o = self.v_o - lr * self.grad_vo
self.b_f = self.b_f - lr*self.grad_bf
self.b_i = self.b_i - lr * self.grad_bi
self.b_g = self.b_g - lr * self.grad_bg
self.b_o = self.b_o - lr * self.grad_bo
class OutputLayer():
def __init__(self, hidden_size, output_size):
self.w_h = np.ones([output_size, hidden_size])
self.b_h = np.zeros([output_size, 1])
def forward(self, h_cur):
return np.dot(self.w_h, h_cur) + self.b_h
def backward(self,y,h_cur, train_data):
delta = y - train_data
self.grad_wh = np.dot(delta, h_cur.T)
self.grad_hcur = np.dot(self.w_h.T, delta)
self.grad_bh = delta
def step(self, lr=0.001):
self.w_h = self.w_h - lr * self.grad_wh
self.b_h = self.b_h - lr * self.grad_bh
#---------------------------------------------------
LstmHidden = HiddenLayer(6, 10)
LstmOut = OutputLayer(10, 6)
Fgate_data = np.zeros([101,10,1]) #这些都是要存储的数据
Igate_data = np.zeros([100,10,1])
Ggate_data = np.zeros([100,10,1])
Ogate_data = np.zeros([100,10,1])
gradc_data = np.zeros([101,10,1]) #这里是101是因为c和h都多一个第0时刻的数据
gradh_data = np.zeros([101,10,1])
c_data = np.zeros([101,10,1])
h_data = np.zeros([101,10,1])
y = np.zeros([100,6,1])
epoch = 5001
total_time = len(train_x)
for e in tqdm(range(epoch)):
for t in range(total_time):
h_data[t + 1],c_data[t + 1] = LstmHidden.forward(train_x[t], h_data[t], c_data[t])
Fgate_data[t] = LstmHidden.Fgate
Igate_data[t] = LstmHidden.Igate
Ggate_data[t] = LstmHidden.Ggate
Ogate_data[t] = LstmHidden.Ogate
y[t] = LstmOut.forward(h_data[t + 1])
LstmOut.backward(y[total_time-1], h_data[total_time], train_y[total_time-1])
gradh_data[total_time]=LstmOut.grad_hcur
gradc_data[total_time] =gradh_data[total_time] * Ogate_data[total_time-1]* (1 - c_data[total_time] * c_data[total_time])
LstmOut.backward(y[total_time-2], h_data[total_time-1], train_y[total_time-2])
gradh_data[total_time-1]=LstmOut.grad_hcur
for t in reversed(range(total_time-1)):
LstmOut.backward(y[t], h_data[t + 1], train_y[t])
LstmHidden.backward(Fgate_data[t],Igate_data[t],Ggate_data[t],Ogate_data[t],train_x[t],
gradc_data[t+2],Fgate_data[t+1], gradh_data[t+1], c_data[t+1], c_data[t], h_data[t])
gradc_data[t+1] = LstmHidden.grad_ccur
gradh_data[t] = LstmHidden.grad_hpre
LstmHidden.step(lr=0.00037)
LstmOut.step(lr=0.00037)
if e%200 == 0 :
plt.clf()
plt.scatter(train_x, train_y, c="blue", s=15) # 蓝色线为真实值
plt.scatter(train_x, y, c="orange", s=15) # 黄色线为预测值
plt.savefig('x^2_epoch5000_lr00037_%s'%e)
loss = (y-train_y)**2
print(loss)




![[Linux]网络连接、资源共享](https://img-blog.csdnimg.cn/125fdc25a0fe40dc85b8be8f28db4266.png)