项目场景:
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具有快速数据传输、低功耗、易于集成以及高度可扩展性等特点。
Baumer相机系列中偏振相机的特殊功能有助于在一些特殊应用场合使用。
技术背景
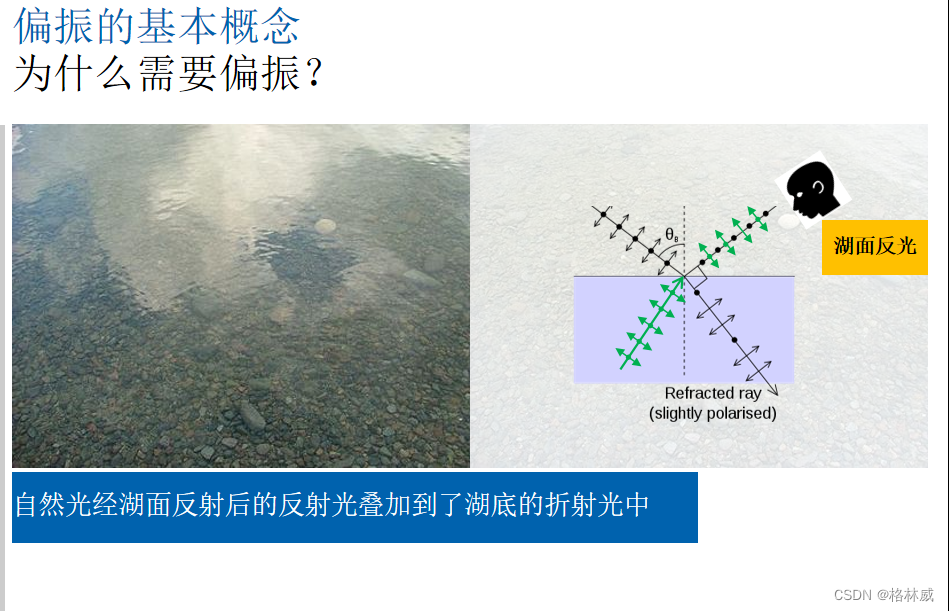
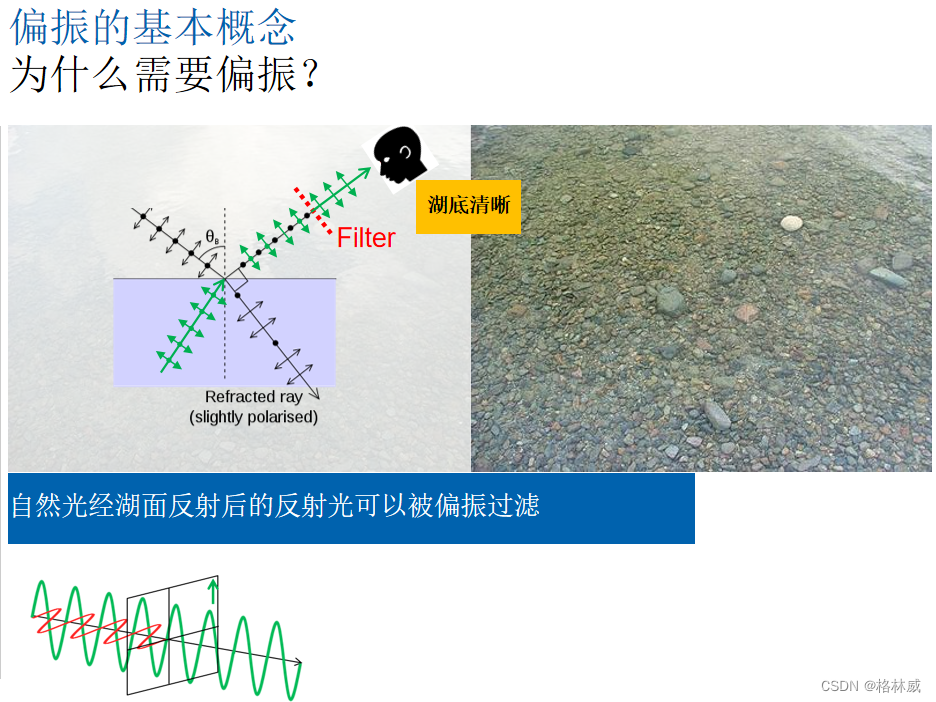
偏光工业相机相机旨在捕捉偏光,以提高图像质量,减少各种工业应用中的眩光。
这些相机的镜头中集成了偏振滤光片,可以帮助改善图像对比度,提高色彩饱和度,并减少闪亮表面的反射。
偏光工业相机的一些关键特征可能包括高分辨率、快速帧率、适用于工业环境的坚固设计,以及与不同照明条件的兼容性。
此外,它们可能具有触发、曝光控制和图像处理能力等功能,有助于为检查和分析目的捕获清晰和详细的图像。

代码分析
Baumer工业相机堡盟相机SDK示例中020_Polarized.cpp详细介绍了如何配置相机偏振功能。
软件SDK示例地址如下所示:Baumer_GAPI_SDK_2.9.2_win_x86_64_cpp\examples\src\0_Common\020_Polarized_SinglePart\020_Polarized_SinglePart.cpp
Baumer工业相机系列中VCXU-50MP和VCXG-50MP为偏振工业相机。
| Model | Resolution | Sensor | Frame rate GigE USB3 | ||
| VCXG-50MP | 5 MP | 2448 × 2048 | Sony IMX250MZR (2/3″, 3.45 µm) | 35|24 | - |
| VCXU-50MP | 5 MP | 2448 × 2048 | Sony IMX250MZR (2/3″, 3.45 µm) | - | 77 |
该示例描述了如何使用所提供的堡盟GAPI API功能来配置相机并计算所需的偏振数据(AOL、DOP、ADOLP、Intensity)
下面的例子描述了如何从VCXU-50MP 和 VCXG-50MP 获得偏振数据。
描述了所有如何使用提供的 Baumer GAPI API 功能来配置相机和计算所需的偏振数据(AOL,DOP,ADOLP,亮度)如果需要多于一种可用的偏振数据格式,使用多部分图像进行计算会更有效。
这在示例021 _ Polalization _ MultiPart 中进行了描述
代码整体结构相对简单,在相机初始化后进行相机的偏振功能使用,下面主要描述部分核心代码如下:
/*
This example describes how to obtain polarisation data from the Baumer VCXU-50MP and VCXG-50MP.
The example describes all how to use the provided Baumer GAPI API functionality to configure
the camera and calculate the required polarisation data (AOL, DOP, ADOLP, Intensity)
If more than one of the available polarisation data format is needed it is more efficient to use
a multi-part image for the calculation. This is described in the example 021_Polarized_MultiPart.cpp
*/
#include <stdio.h>
#include <iostream>
#include <iomanip>
#include <string>
#include <sstream>
#include "bgapi2_genicam/bgapi2_genicam.hpp"
// handles the command line argument parsing
#include "Arguments.h"
using namespace BGAPI2;
//------------------------------------------------------------------------------
static double g_aopOffset = 0.0;
static bool g_bAopOffset = false;
struct DeviceMatch {
BGAPI2::System* pSystem;
BGAPI2::Interface* pInterface;
BGAPI2::Device* pDevice;
};
//------------------------------------------------------------------------------
/* Read the polarization calibration matrix and angle of polarization offset from the camera
used to calculated the required polarisation data in the Baumer GAPI image processor */
static void SetDeviceCalibrationToImageProcessor(BGAPI2::Device* const pDevice, BGAPI2::ImageProcessor* const pImageProcessor);
/* Setup the Baumer GAPI to calculate the requested polarization component from the raw
polarized image */
static void EnableSingleComponent(BGAPI2::Image* const pImage, const std::string sComponent);
/* Get the Angle Offset from the command line parameter (if provided) and use it for the calculation */
static void argumentAopOffset(const Argument& argument, const ArgumentMode mode, const char* const pParam);
/* connect to the first polarisation camera found on the system */
static int GetFirstDevice(DeviceMatch* const pMatch
, bool(*pSystemFilter)(BGAPI2::System* pSystem)
, bool(*pInterfaceFilter)(BGAPI2::Interface* pInterface)
, bool(*pDeviceFilter)(BGAPI2::Device* pDevice)
, std::ostream& log);
/* Helper to Display various information of the camera */
static void GetDeviceInfo(std::ostream& log, BGAPI2::Device* const pDevice, const bool bOpen);
/* Helper to filter found cameras devices and select only polarization camera for this example */
static bool PolarizationDeviceFilter(BGAPI2::Device* const pDevice);
/* Release all allocated resources */
static int ReleaseAllResources(BGAPI2::System* pSystem, BGAPI2::Interface* pInterface, BGAPI2::Device* pDevice
, BGAPI2::DataStream* pDataStream, BGAPI2::ImageProcessor* pImageProcessor);
//------------------------------------------------------------------------------
int main(int argc, char* argv[])
{
// Declaration of variables
BGAPI2::System* pSystem = NULL;
BGAPI2::Interface* pInterface = NULL;
BGAPI2::Device* pDevice = NULL;
BGAPI2::ImageProcessor* pImageProcessor = NULL;
BGAPI2::DataStreamList *datastreamList = NULL;
BGAPI2::DataStream * pDataStream = NULL;
BGAPI2::String sDataStreamID;
BGAPI2::BufferList *bufferList = NULL;
BGAPI2::Buffer * pBuffer = NULL;
BGAPI2::String sBufferID;
int returncode = 0;
std::string sComponent = "ADOLP";
bool bBufferedLog = true;
std::cout << std::endl;
std::cout << "###########################################################" << std::endl;
std::cout << "# PROGRAMMER'S GUIDE Example 020_Polarized_SinglePart.cpp #" << std::endl;
std::cout << "###########################################################" << std::endl;
std::cout << std::endl << std::endl;
static const Argument argumentList[] = {
{ &sComponent, "c", "component", false, argumentString, 0, "<component>", "enable component (Intensity/AOP/DOLP/ADOLP)" },
{ NULL, "o", "offsetAOP", false, argumentAopOffset, 0, "<aop offset>", "angle of polarization offset" },
};
parseArguments(argumentList, sizeof(argumentList) / sizeof(argumentList[0]), argc, argv);
// Check if the polarisation format provided as command line parameter is a valid polarisation format
try
{
pImageProcessor = new BGAPI2::ImageProcessor();
// Create dummy image to check if requested component is available
char dummyBuffer[1];
BGAPI2::Image* pImage = pImageProcessor->CreateImage(1, 1, "BaumerPolarized8", dummyBuffer, sizeof(dummyBuffer));
BGAPI2::Node* pComponentSelector = pImage->GetNode("ComponentSelector");
pComponentSelector->SetValue(sComponent.c_str());
pImage->Release();
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
std::cout << std::endl << "Component '" << sComponent << "' not supported" << std::endl;
std::cout << std::endl << "Supported Formats are Intensity, AOP, DOP and ADOLP" << std::endl;
std::cout << std::endl << "End" << std::endl << "Input any number to close the program:";
int endKey = 0;
std::cin >> endKey;
ReleaseAllResources(pSystem, pInterface, pDevice, pDataStream, pImageProcessor);
return returncode;
}
// Find and open the first polarisation camera
DeviceMatch match = { NULL, NULL, NULL };
std::stringstream bufferedLog;
const int code = GetFirstDevice(&match, NULL, NULL, PolarizationDeviceFilter, bBufferedLog ? bufferedLog : std::cout);
pSystem = match.pSystem;
pInterface = match.pInterface;
pDevice = match.pDevice;
if ((code != 0) || (pDevice == NULL))
{
// Error or no device found
if (bBufferedLog != false)
{
// Display full device search
std::cout << bufferedLog.str();
}
returncode = (returncode == 0) ? code : returncode;
if (returncode == 0)
{
std::cout << " No Polarized Device found " << sDataStreamID << std::endl;
}
std::cout << std::endl << "End" << std::endl << "Input any number to close the program:";
int endKey = 0;
std::cin >> endKey;
ReleaseAllResources(pSystem, pInterface, pDevice, pDataStream, pImageProcessor);
return returncode;
}
GetDeviceInfo(std::cout, pDevice, false);
/* Determine the polarized pixel format for processing
As the camera sends the raw polarized data as a Mono8/10/12 pixelformat we need to pick the
corresponding Baumer polarized pixelformat depending on the camera setting for the
calculation of the polarized image.
*/
std::string sPixelFormatRaw = "";
try {
BGAPI2::String sPixelFormat = pDevice->GetRemoteNode("PixelFormat")->GetValue();
if (sPixelFormat == "Mono8")
{
sPixelFormatRaw = "BaumerPolarized8";
}
else if (sPixelFormat == "Mono10")
{
sPixelFormatRaw = "BaumerPolarized10";
}
else if (sPixelFormat == "Mono12")
{
sPixelFormatRaw = "BaumerPolarized12";
}
else if (sPixelFormat == "Mono12p")
{
sPixelFormatRaw = "BaumerPolarized12p";
}
else
{
std::cout << " Pixel format not supported" << sDataStreamID << std::endl;
}
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
if (sPixelFormatRaw == "")
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << std::endl << "End" << std::endl << "Input any number to close the program:";
int endKey = 0;
std::cin >> endKey;
ReleaseAllResources(pSystem, pInterface, pDevice, pDataStream, pImageProcessor);
return returncode;
}
std::cout << "DEVICE PARAMETER SETUP" << std::endl;
std::cout << "######################" << std::endl << std::endl;
// Set angle of polarization offset to device, if command line parameter passed
if (g_bAopOffset)
{
try
{
BGAPI2::Node* const pAngleOfPolarizationOffset = pDevice->GetRemoteNode("CalibrationAngleOfPolarizationOffset");
pAngleOfPolarizationOffset->SetDouble(g_aopOffset);
std::cout << " AngleOfPolarizationOffset: " << pAngleOfPolarizationOffset->GetValue() << std::endl;
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
}
try
{
// Set trigger mode to off (FreeRun)
pDevice->GetRemoteNode("TriggerMode")->SetString("Off");
std::cout << " TriggerMode: " << pDevice->GetRemoteNode("TriggerMode")->GetValue() << std::endl;
std::cout << std::endl;
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
std::cout << "IMAGE PROCESSOR SETUP" << std::endl;
std::cout << "#####################" << std::endl << std::endl;
// Configure the Image Processor to use the calibration values from the camera device
try
{
SetDeviceCalibrationToImageProcessor(pDevice, pImageProcessor);
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
std::cout << std::endl << std::endl;
std::cout << "DATA STREAM LIST" << std::endl;
std::cout << "################" << std::endl << std::endl;
try
{
// Get information for all available data streams
datastreamList = pDevice->GetDataStreams();
datastreamList->Refresh();
std::cout << "5.1.8 Detected datastreams: " << datastreamList->size() << std::endl;
for (DataStreamList::iterator dstIterator = datastreamList->begin(); dstIterator != datastreamList->end(); dstIterator++)
{
std::cout << " 5.2.4 DataStream ID: " << dstIterator->first << std::endl << std::endl;
}
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
std::cout << "DATA STREAM" << std::endl;
std::cout << "###########" << std::endl << std::endl;
// Open the first datastream
try
{
for (DataStreamList::iterator dstIterator = datastreamList->begin(); dstIterator != datastreamList->end(); dstIterator++)
{
std::cout << "5.1.9 Open first datastream " << std::endl;
std::cout << " DataStream ID: " << dstIterator->first << std::endl << std::endl;
dstIterator->second->Open();
sDataStreamID = dstIterator->first;
std::cout << " Opened datastream - NodeList Information " << std::endl;
std::cout << " StreamAnnounceBufferMinimum: " << dstIterator->second->GetNode("StreamAnnounceBufferMinimum")->GetValue() << std::endl;
if( dstIterator->second->GetTLType() == "GEV" )
{
std::cout << " StreamDriverModel: " << dstIterator->second->GetNode("StreamDriverModel")->GetValue() << std::endl;
}
std::cout << " " << std::endl;
break;
}
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
if (sDataStreamID == "")
{
std::cout << " No DataStream found " << sDataStreamID << std::endl;
std::cout << std::endl << "End" << std::endl << "Input any number to close the program:";
int endKey = 0;
std::cin >> endKey;
ReleaseAllResources(pSystem, pInterface, pDevice, pDataStream, pImageProcessor);
return returncode;
}
else
{
pDataStream = (*datastreamList)[sDataStreamID];
}
std::cout << "BUFFER LIST" << std::endl;
std::cout << "###########" << std::endl << std::endl;
try
{
// get the BufferList
bufferList = pDataStream->GetBufferList();
// allocate 4 buffers using internal buffer mode
for(int i = 0; i < 4; i++)
{
pBuffer = new BGAPI2::Buffer();
bufferList->Add(pBuffer);
}
std::cout << "5.1.10 Announced buffers: " << bufferList->GetAnnouncedCount() << " using " << pBuffer->GetMemSize() * bufferList->GetAnnouncedCount() << " [bytes]" << std::endl;
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
try
{
for (BufferList::iterator bufIterator = bufferList->begin(); bufIterator != bufferList->end(); bufIterator++)
{
bufIterator->second->QueueBuffer();
}
std::cout << "5.1.11 Queued buffers: " << bufferList->GetQueuedCount() << std::endl;
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
std::cout << " " << std::endl;
std::cout << "CAMERA START" << std::endl;
std::cout << "############" << std::endl << std::endl;
// Start DataStream acquisition
try
{
pDataStream->StartAcquisitionContinuous();
std::cout << "5.1.12 DataStream started " << std::endl;
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
// Start aquisition from camera device
try
{
std::cout << "5.1.12 " << pDevice->GetModel() << " started " << std::endl;
pDevice->GetRemoteNode("AcquisitionStart")->Execute();
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
// Capture 12 images
std::cout << " " << std::endl;
std::cout << "CAPTURE 12 IMAGES BY IMAGE POLLING" << std::endl;
std::cout << "##################################" << std::endl << std::endl;
// Create the image object to store the calculated polarisation data
BGAPI2::Image* pImagePolarized = NULL;
try
{
// Set to true to save result of the first captured image as a Baumer RAW image
bool bSaveBrw = true;
for (int i = 0; i < 12; i++)
{
BGAPI2::Buffer* pBufferFilled = pDataStream->GetFilledBuffer(1000); // timeout 1000 msec
if (pBufferFilled == NULL)
{
std::cout << "Error: Buffer Timeout after 1000 msec" << std::endl;
}
else
{
try
{
if (pBufferFilled->GetIsIncomplete() == true)
{
std::cout << "Error: Image is incomplete" << std::endl;
}
else if (pBufferFilled->GetImagePresent() != true)
{
std::cout << "Error: Image not present" << std::endl;
}
else
{
// get information about the image from the buffer object
bo_uint width = static_cast<bo_uint>(pBufferFilled->GetWidth());
bo_uint height = static_cast<bo_uint>(pBufferFilled->GetHeight());
void* pBufferData = pBufferFilled->GetMemPtr();
bo_uint64 bufferDataSize = pBufferFilled->GetMemSize();
bo_uint64 imageOffset = pBufferFilled->GetImageOffset();
bo_uint64 imageDataSize = (bufferDataSize > imageOffset) ? (bufferDataSize - imageOffset) : 0;
void* pImageData = reinterpret_cast<char*>(pBufferData) + imageOffset;
std::cout << " Image " << std::setw(5) << pBufferFilled->GetFrameID() << " received in memory address " << std::hex << pBufferData << std::dec << std::endl;
/* For the first image, a new image object is created, all further images reuse the object and
therefore just initialize it with new data */
if (pImagePolarized == NULL)
{
pImagePolarized = pImageProcessor->CreateImage(width, height, sPixelFormatRaw.c_str(), pImageData, imageDataSize);
// Enable the component to be calculated, disable all others
EnableSingleComponent(pImagePolarized, sComponent);
}
else
{
pImagePolarized->Init(width, height, sPixelFormatRaw.c_str(), pImageData, imageDataSize);
/* As the pixel format is the same for all images captured, the enabled components and the active component selector
are preserved, so you don't need to enable components on every image. */
}
// Calculate the required Polarisation format using a direct transformation from raw polarized image.
BGAPI2::Image* pComponent = pImageProcessor->CreateTransformedImage(pImagePolarized
, (sComponent != "ADOLP") ? "Mono8" : "RGB8");
std::cout << " component image: " << pComponent->GetNode("ComponentSelector")->GetValue().get() << std::endl;
if (bSaveBrw) {
std::string sFilename = sComponent + ".brw";
pComponent->GetNode("SaveBrw")->SetValue(sFilename.c_str());
}
pComponent->Release();
bSaveBrw = false;
}
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
}
if (pBufferFilled)
{
// Queue buffer again
pBufferFilled->QueueBuffer();
}
}
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
std::cout << " " << std::endl;
if (pImagePolarized)
{
try
{
pImagePolarized->Release();
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
}
std::cout << "CAMERA STOP" << std::endl;
std::cout << "###########" << std::endl << std::endl;
// Stop the camera
try
{
if (pDevice->GetRemoteNodeList()->GetNodePresent("AcquisitionAbort"))
{
pDevice->GetRemoteNode("AcquisitionAbort")->Execute();
std::cout << "5.1.12 " << pDevice->GetModel() << " aborted " << std::endl;
}
pDevice->GetRemoteNode("AcquisitionStop")->Execute();
std::cout << "5.1.12 " << pDevice->GetModel() << " stopped " << std::endl;
std::cout << std::endl;
BGAPI2::String sExposureNodeName = "";
if (pDevice->GetRemoteNodeList()->GetNodePresent("ExposureTime"))
{
sExposureNodeName = "ExposureTime";
}
else if (pDevice->GetRemoteNodeList()->GetNodePresent("ExposureTimeAbs"))
{
sExposureNodeName = "ExposureTimeAbs";
}
std::cout << " ExposureTime: " << std::fixed << std::setprecision(0) << pDevice->GetRemoteNode(sExposureNodeName)->GetDouble() << " [" << pDevice->GetRemoteNode(sExposureNodeName)->GetUnit() << "]" << std::endl;
if (pDevice->GetTLType() == "GEV")
{
if(pDevice->GetRemoteNodeList()->GetNodePresent("DeviceStreamChannelPacketSize"))
std::cout << " DeviceStreamChannelPacketSize: " << pDevice->GetRemoteNode("DeviceStreamChannelPacketSize")->GetInt() << " [bytes]" << std::endl;
else
std::cout << " GevSCPSPacketSize: " << pDevice->GetRemoteNode("GevSCPSPacketSize")->GetInt() << " [bytes]" << std::endl;
std::cout << " GevSCPD (PacketDelay): " << pDevice->GetRemoteNode("GevSCPD")->GetInt() << " [tics]" << std::endl;
}
std::cout << std::endl;
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
// Stop DataStream acquisition
try
{
if (pDataStream->GetTLType() == "GEV")
{
// DataStream Statistic
std::cout << " DataStream Statistics " << std::endl;
std::cout << " DataBlockComplete: " << pDataStream->GetNodeList()->GetNode("DataBlockComplete")->GetInt() << std::endl;
std::cout << " DataBlockInComplete: " << pDataStream->GetNodeList()->GetNode("DataBlockInComplete")->GetInt() << std::endl;
std::cout << " DataBlockMissing: " << pDataStream->GetNodeList()->GetNode("DataBlockMissing")->GetInt() << std::endl;
std::cout << " PacketResendRequestSingle: " << pDataStream->GetNodeList()->GetNode("PacketResendRequestSingle")->GetInt() << std::endl;
std::cout << " PacketResendRequestRange: " << pDataStream->GetNodeList()->GetNode("PacketResendRequestRange")->GetInt() << std::endl;
std::cout << " PacketResendReceive: " << pDataStream->GetNodeList()->GetNode("PacketResendReceive")->GetInt() << std::endl;
std::cout << " DataBlockDroppedBufferUnderrun: " << pDataStream->GetNodeList()->GetNode("DataBlockDroppedBufferUnderrun")->GetInt() << std::endl;
std::cout << " Bitrate: " << pDataStream->GetNodeList()->GetNode("Bitrate")->GetDouble() << std::endl;
std::cout << " Throughput: " << pDataStream->GetNodeList()->GetNode("Throughput")->GetDouble() << std::endl;
std::cout << std::endl;
}
if (pDataStream->GetTLType() == "U3V")
{
// DataStream Statistic
std::cout << " DataStream Statistics " << std::endl;
std::cout << " GoodFrames: " << pDataStream->GetNodeList()->GetNode("GoodFrames")->GetInt() << std::endl;
std::cout << " CorruptedFrames: " << pDataStream->GetNodeList()->GetNode("CorruptedFrames")->GetInt() << std::endl;
std::cout << " LostFrames: " << pDataStream->GetNodeList()->GetNode("LostFrames")->GetInt() << std::endl;
std::cout << std::endl;
}
// BufferList Information
std::cout << " BufferList Information " << std::endl;
std::cout << " DeliveredCount: " << bufferList->GetDeliveredCount() << std::endl;
std::cout << " UnderrunCount: " << bufferList->GetUnderrunCount() << std::endl;
std::cout << std::endl;
pDataStream->StopAcquisition();
std::cout << "5.1.12 DataStream stopped " << std::endl;
bufferList->DiscardAllBuffers();
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
std::cout << std::endl;
std::cout << "RELEASE" << std::endl;
std::cout << "#######" << std::endl << std::endl;
// Release buffers
std::cout << "5.1.13 Releasing the resources " << std::endl;
try
{
while (bufferList->size() > 0)
{
pBuffer = bufferList->begin()->second;
bufferList->RevokeBuffer(pBuffer);
delete pBuffer;
}
std::cout << " buffers after revoke: " << bufferList->size() << std::endl;
ReleaseAllResources(pSystem, pInterface, pDevice, pDataStream, pImageProcessor);
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
}
std::cout << std::endl;
std::cout << "End" << std::endl << std::endl;
std::cout << "Input any number to close the program:";
int endKey = 0;
std::cin >> endKey;
return returncode;
}
//------------------------------------------------------------------------------
/* Setup the Baumer GAPI to calculate the requested polarization component from the raw
polarized image */
void EnableSingleComponent(BGAPI2::Image* const pImage, const std::string sComponent)
{
BGAPI2::Node* pComponentSelector = pImage->GetNode("ComponentSelector");
BGAPI2::Node* pComponentEnable = pImage->GetNode("ComponentEnable");
BGAPI2::NodeMap*pComponents = pComponentSelector->GetEnumNodeList();
const bo_uint64 componentsAvailable = pComponents->GetNodeCount();
for (bo_uint64 i = 0; i < componentsAvailable; i++) {
pComponentSelector->SetInt(i);
pComponentEnable->SetBool(sComponent == pComponentSelector->GetValue().get());
}
}
//------------------------------------------------------------------------------
/* Read the polarization calibration matrix and angle of polarization offset from the camera
used to calculated the required polarisation data in the Baumer GAPI image processor */
void SetDeviceCalibrationToImageProcessor(BGAPI2::Device* const pDevice, BGAPI2::ImageProcessor* const pImageProcessor)
{
struct CalibrationEntry {
const char* pSelector;
unsigned int row;
unsigned int col;
};
static const CalibrationEntry calibrationEntry[] = {
{ "Gain00", 0, 0 },
{ "Gain01", 0, 1 },
{ "Gain02", 0, 2 },
{ "Gain03", 0, 3 },
{ "Gain10", 1, 0 },
{ "Gain11", 1, 1 },
{ "Gain12", 1, 2 },
{ "Gain13", 1, 3 },
{ "Gain20", 2, 0 },
{ "Gain21", 2, 1 },
{ "Gain22", 2, 2 },
{ "Gain23", 2, 3 },
};
BGAPI2::NodeMap* const pDeviceMap = pDevice->GetRemoteNodeList();
BGAPI2::Node* pDeviceCalibrationMatrixValueSelector = pDeviceMap->GetNode("CalibrationMatrixValueSelector");
BGAPI2::Node* pDeviceCalibrationMatrixValue = pDeviceMap->GetNode("CalibrationMatrixValue");
BGAPI2::Node* pCalibrationMatrixRowSelector = pImageProcessor->GetNode("CalibrationMatrixRowSelector");
BGAPI2::Node* pCalibrationMatrixColSelector = pImageProcessor->GetNode("CalibrationMatrixColumnSelector");
BGAPI2::Node* pCalibrationMatrixValue = pImageProcessor->GetNode("CalibrationMatrixValue");
const std::streamsize precision = std::cout.precision(5);
const std::ios_base::fmtflags flags = std::cout.flags();
std::cout.setf(std::ios_base::fixed | std::ios_base::right);
// Set calibration matrix from device to image processor
for (unsigned int i = 0; i < sizeof(calibrationEntry) / sizeof(calibrationEntry[0]); i++)
{
pDeviceCalibrationMatrixValueSelector->SetValue(calibrationEntry[i].pSelector);
double value = pDeviceCalibrationMatrixValue->GetDouble();
std::cout << " CalibrationMatrix " << calibrationEntry[i].pSelector << ": "
<< std::setw(8) << value << std::endl;
pCalibrationMatrixRowSelector->SetInt(calibrationEntry[i].row);
pCalibrationMatrixColSelector->SetInt(calibrationEntry[i].col);
pCalibrationMatrixValue->SetDouble(value);
}
std::cout.precision(2);
// Set angle of polarisation offset from device to image processor
const double aopOffset = pDeviceMap->GetNode("CalibrationAngleOfPolarizationOffset")->GetDouble();
std::cout << " CalibrationAngleOfPolarizationOffset: " << std::setw(6) << aopOffset << std::endl << std::endl;
pImageProcessor->GetNode("CalibrationAngleOfPolarizationOffset")->SetDouble(aopOffset);
std::cout.precision(precision);
std::cout.flags(flags);
}
//------------------------------------------------------------------------------
/* Get the Angle Offset from the command line parameter (if provided) and use it for the calculation */
void argumentAopOffset(const Argument& argument, const ArgumentMode mode, const char* const pParam)
{
if (mode == eArgumentInit)
{
g_aopOffset = 0.0;
g_bAopOffset = false;
}
else
{
double value = 0.0;
#if _WIN32
if ((pParam != NULL) && (sscanf_s(pParam, "%lf", &value) == 1))
#else
if ((pParam != NULL) && (sscanf(pParam, "%lf", &value) == 1))
#endif
{
g_aopOffset = value;
g_bAopOffset = true;
}
}
}
//------------------------------------------------------------------------------
/* Helper to filter found cameras devices and select only polarization camera for this example */
bool PolarizationDeviceFilter(BGAPI2::Device* const pDevice)
{
if (pDevice->GetRemoteNodeList()->GetNodePresent("ComponentSelector"))
{
if (pDevice->GetRemoteNode("ComponentSelector")->GetValue() == "PolarizedRaw")
{
return true;
}
}
return false;
}
//------------------------------------------------------------------------------
int GetFirstDevice(DeviceMatch* const pMatch
, bool(*pSystemFilter)(BGAPI2::System* pSystem)
, bool(*pInterfaceFilter)(BGAPI2::Interface* pInterface)
, bool(*pDeviceFilter)(BGAPI2::Device* pDevice)
, std::ostream& log)
{
int returncode = 0;
log << "SYSTEM LIST" << std::endl;
log << "###########" << std::endl << std::endl;
try {
BGAPI2::SystemList* pSystemList = SystemList::GetInstance();
// Counting available systems (TL producers)
pSystemList->Refresh();
log << "5.1.2 Detected systems: " << pSystemList->size() << std::endl;
// System device information
for (SystemList::iterator sysIterator = pSystemList->begin(); sysIterator != pSystemList->end(); sysIterator++)
{
BGAPI2::System* const pSystem = sysIterator->second;
log << " 5.2.1 System Name: " << pSystem->GetFileName() << std::endl;
log << " System Type: " << pSystem->GetTLType() << std::endl;
log << " System Version: " << pSystem->GetVersion() << std::endl;
log << " System PathName: " << pSystem->GetPathName() << std::endl << std::endl;
}
for (SystemList::iterator sysIterator = pSystemList->begin(); sysIterator != pSystemList->end(); sysIterator++)
{
log << "SYSTEM" << std::endl;
log << "######" << std::endl << std::endl;
BGAPI2::System* const pSystem = sysIterator->second;
pMatch->pSystem = pSystem;
try
{
pSystem->Open();
log << "5.1.3 Open next system " << std::endl;
log << " 5.2.1 System Name: " << pSystem->GetFileName() << std::endl;
log << " System Type: " << pSystem->GetTLType() << std::endl;
log << " System Version: " << pSystem->GetVersion() << std::endl;
log << " System PathName: " << pSystem->GetPathName() << std::endl << std::endl;
log << " Opened system - NodeList Information " << std::endl;
log << " GenTL Version: " << pSystem->GetNode("GenTLVersionMajor")->GetValue() << "." << pSystem->GetNode("GenTLVersionMinor")->GetValue() << std::endl << std::endl;
const char* pCloseSystemReason = "???";
if ((pSystemFilter != NULL) && (pSystemFilter(pSystem) == false))
{
pCloseSystemReason = "skipped";
}
else
{
log << "INTERFACE LIST" << std::endl;
log << "##############" << std::endl << std::endl;
try
{
BGAPI2::InterfaceList* pInterfaceList = pSystem->GetInterfaces();
// Count available interfaces
pInterfaceList->Refresh(100); // timeout of 100 msec
log << "5.1.4 Detected interfaces: " << pInterfaceList->size() << std::endl;
// Interface information
for (InterfaceList::iterator ifIterator = pInterfaceList->begin(); ifIterator != pInterfaceList->end(); ifIterator++)
{
BGAPI2::Interface* const pInterface = ifIterator->second;
log << " 5.2.2 Interface ID: " << ifIterator->first << std::endl;
log << " Interface Type: " << pInterface->GetTLType() << std::endl;
log << " Interface Name: " << pInterface->GetDisplayName() << std::endl << std::endl;
}
log << "INTERFACE" << std::endl;
log << "#########" << std::endl << std::endl;
for (InterfaceList::iterator ifIterator = pInterfaceList->begin(); ifIterator != pInterfaceList->end(); ifIterator++)
{
try
{
// Open the next interface in the list
BGAPI2::Interface* const pInterface = ifIterator->second;
pMatch->pInterface = pInterface;
log << "5.1.5 Open interface " << std::endl;
log << " 5.2.2 Interface ID: " << ifIterator->first << std::endl;
log << " Interface Type: " << pInterface->GetTLType() << std::endl;
log << " Interface Name: " << pInterface->GetDisplayName() << std::endl;
pInterface->Open();
const char* pReason = "???";
if ((pInterfaceFilter != NULL) && (pInterfaceFilter(pInterface) == false))
{
pReason = "skipped";
}
else
{
// Search for any camera is connected to this interface
BGAPI2::DeviceList* const pDeviceList = pInterface->GetDevices();
pDeviceList->Refresh(100);
if (pDeviceList->size() == 0)
{
pReason = "no camera found";
}
else
{
log << " " << std::endl;
log << " Opened interface - NodeList Information " << std::endl;
if (pInterface->GetTLType() == "GEV")
{
log << " GevInterfaceSubnetIPAddress: " << pInterface->GetNode("GevInterfaceSubnetIPAddress")->GetValue() << std::endl;
log << " GevInterfaceSubnetMask: " << pInterface->GetNode("GevInterfaceSubnetMask")->GetValue() << std::endl;
}
if (pInterface->GetTLType() == "U3V")
{
// log << " NodeListCount: " << pInterface->GetNodeList()->GetNodeCount() << std::endl;
}
// Open the first matching camera in the list
try
{
// Counting available cameras
log << "5.1.6 Detected devices: " << pDeviceList->size() << std::endl;
// Device information before opening
for (DeviceList::iterator devIterator = pDeviceList->begin(); devIterator != pDeviceList->end(); devIterator++)
{
BGAPI2::Device* const pDevice = devIterator->second;
log << " 5.2.3 Device DeviceID: " << pDevice->GetID() << std::endl;
log << " Device Model: " << pDevice->GetModel() << std::endl;
log << " Device SerialNumber: " << pDevice->GetSerialNumber() << std::endl;
log << " Device Vendor: " << pDevice->GetVendor() << std::endl;
log << " Device TLType: " << pDevice->GetTLType() << std::endl;
log << " Device AccessStatus: " << pDevice->GetAccessStatus() << std::endl;
log << " Device UserID: " << pDevice->GetDisplayName() << std::endl << std::endl;
}
for (DeviceList::iterator devIterator = pDeviceList->begin(); devIterator != pDeviceList->end(); devIterator++)
{
try
{
BGAPI2::Device* const pDevice = devIterator->second;
pMatch->pDevice = pDevice;
GetDeviceInfo(log, pDevice, true);
if ((pDeviceFilter == NULL) || (pDeviceFilter(pDevice) == true))
{
return returncode;
}
log << " Close device (skipped) " << std::endl << std::endl;
pDevice->Close();
pMatch->pDevice = NULL;
}
catch (BGAPI2::Exceptions::ResourceInUseException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
log << " Device " << devIterator->first << " already opened " << std::endl;
log << " ResourceInUseException: " << ex.GetErrorDescription() << std::endl;
}
catch (BGAPI2::Exceptions::AccessDeniedException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
log << " Device " << devIterator->first << " already opened " << std::endl;
log << " AccessDeniedException " << ex.GetErrorDescription() << std::endl;
}
}
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
log << "ExceptionType: " << ex.GetType() << std::endl;
log << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
log << "in function: " << ex.GetFunctionName() << std::endl;
}
pReason = "no camera match";
}
}
log << "5.1.13 Close interface (" << pReason << ") " << std::endl << std::endl;
pInterface->Close();
pMatch->pInterface = NULL;
}
catch (BGAPI2::Exceptions::ResourceInUseException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
log << " Interface " << ifIterator->first << " already opened " << std::endl;
log << " ResourceInUseException: " << ex.GetErrorDescription() << std::endl;
}
}
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
log << "ExceptionType: " << ex.GetType() << std::endl;
log << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
log << "in function: " << ex.GetFunctionName() << std::endl;
}
pCloseSystemReason = "no camera match";
}
log << " Close system (" << pCloseSystemReason << ") " << std::endl << std::endl;
pSystem->Close();
pMatch->pSystem = NULL;
}
catch (BGAPI2::Exceptions::ResourceInUseException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
log << " System " << sysIterator->first << " already opened " << std::endl;
log << " ResourceInUseException: " << ex.GetErrorDescription() << std::endl;
}
}
}
catch (BGAPI2::Exceptions::IException& ex)
{
returncode = (returncode == 0) ? 1 : returncode;
log << "ExceptionType: " << ex.GetType() << std::endl;
log << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
log << "in function: " << ex.GetFunctionName() << std::endl;
}
return returncode;
}
//------------------------------------------------------------------------------
/* Helper to Display various information of the camera */
void GetDeviceInfo(std::ostream& log, BGAPI2::Device* const pDevice, const bool bOpen)
{
log << "5.1.7 Open device " << std::endl;
log << " Device DeviceID: " << pDevice->GetID() << std::endl;
log << " Device Model: " << pDevice->GetModel() << std::endl;
log << " Device SerialNumber: " << pDevice->GetSerialNumber() << std::endl;
log << " Device Vendor: " << pDevice->GetVendor() << std::endl;
log << " Device TLType: " << pDevice->GetTLType() << std::endl;
log << " Device AccessStatus: " << pDevice->GetAccessStatus() << std::endl;
log << " Device UserID: " << pDevice->GetDisplayName() << std::endl << std::endl;
if (bOpen)
pDevice->Open();
log << " Opened device - RemoteNodeList Information " << std::endl;
log << " Device AccessStatus: " << pDevice->GetAccessStatus() << std::endl;
BGAPI2::NodeMap* const pRemoteNodeList = pDevice->GetRemoteNodeList();
// Serial number
if (pRemoteNodeList->GetNodePresent("DeviceSerialNumber"))
log << " DeviceSerialNumber: " << pRemoteNodeList->GetNode("DeviceSerialNumber")->GetValue() << std::endl;
else if (pRemoteNodeList->GetNodePresent("DeviceID"))
log << " DeviceID (SN): " << pRemoteNodeList->GetNode("DeviceID")->GetValue() << std::endl;
else
log << " SerialNumber: Not Available " << std::endl;
// Display DeviceManufacturerInfo
if (pRemoteNodeList->GetNodePresent("DeviceManufacturerInfo"))
log << " DeviceManufacturerInfo: " << pRemoteNodeList->GetNode("DeviceManufacturerInfo")->GetValue() << std::endl;
// Display DeviceFirmwareVersion or DeviceVersion
if (pRemoteNodeList->GetNodePresent("DeviceFirmwareVersion"))
log << " DeviceFirmwareVersion: " << pRemoteNodeList->GetNode("DeviceFirmwareVersion")->GetValue() << std::endl;
else if (pRemoteNodeList->GetNodePresent("DeviceVersion"))
log << " DeviceVersion: " << pRemoteNodeList->GetNode("DeviceVersion")->GetValue() << std::endl;
else
log << " DeviceVersion: Not Available " << std::endl;
if (pDevice->GetTLType() == "GEV") {
log << " GevCCP: " << pRemoteNodeList->GetNode("GevCCP")->GetValue() << std::endl;
log << " GevCurrentIPAddress: " << pRemoteNodeList->GetNode("GevCurrentIPAddress")->GetValue() << std::endl;
log << " GevCurrentSubnetMask: " << pRemoteNodeList->GetNode("GevCurrentSubnetMask")->GetValue() << std::endl;
}
log << std::endl;
}
//------------------------------------------------------------------------------
/* Release all allocated resources */
int ReleaseAllResources(BGAPI2::System* pSystem, BGAPI2::Interface* pInterface, BGAPI2::Device* pDevice
, BGAPI2::DataStream* pDataStream, BGAPI2::ImageProcessor* pImageProcessor)
{
try
{
if (pDataStream)
pDataStream->Close();
if (pImageProcessor)
{
delete pImageProcessor;
}
if (pDevice)
{
pDevice->Close();
}
if (pInterface)
{
pInterface->Close();
}
if (pSystem)
{
pSystem->Close();
}
BGAPI2::SystemList::ReleaseInstance();
}
catch (BGAPI2::Exceptions::IException& ex)
{
std::cout << "ExceptionType: " << ex.GetType() << std::endl;
std::cout << "ErrorDescription: " << ex.GetErrorDescription() << std::endl;
std::cout << "in function: " << ex.GetFunctionName() << std::endl;
return 1;
}
return 0;
}
偏振功能的优点
1、减少闪亮或光亮表面的眩光和反射,提高对比度以更好地检测缺陷或表面特征,并加强颜色区分。
2、它们还可以帮助提高汽车、电子和制造业等行业的自动检测和质量控制过程的准确性和速度。
3、偏振照相机在户外应用中很有用,因为那里有大量的阳光或大气雾霾,否则可能会干扰图像的清晰度。
偏振工业相机相对于普通工业相机的优势
偏光工业相机与普通工业相机相比有几个优点。
1、它们使用偏振滤光片来捕捉在单一方向上振动的光波,减少眩光和闪亮表面的反射。这导致了更清晰和更精确的图像,使其更容易识别高反射表面的缺陷或异常情况。
2、偏光相机还提供更好的对比度和颜色精度,允许精确的颜色测量和分析。
3、偏光相机可以在恶劣的环境条件下使用,并能捕捉到普通相机难以看到的物体的图像。
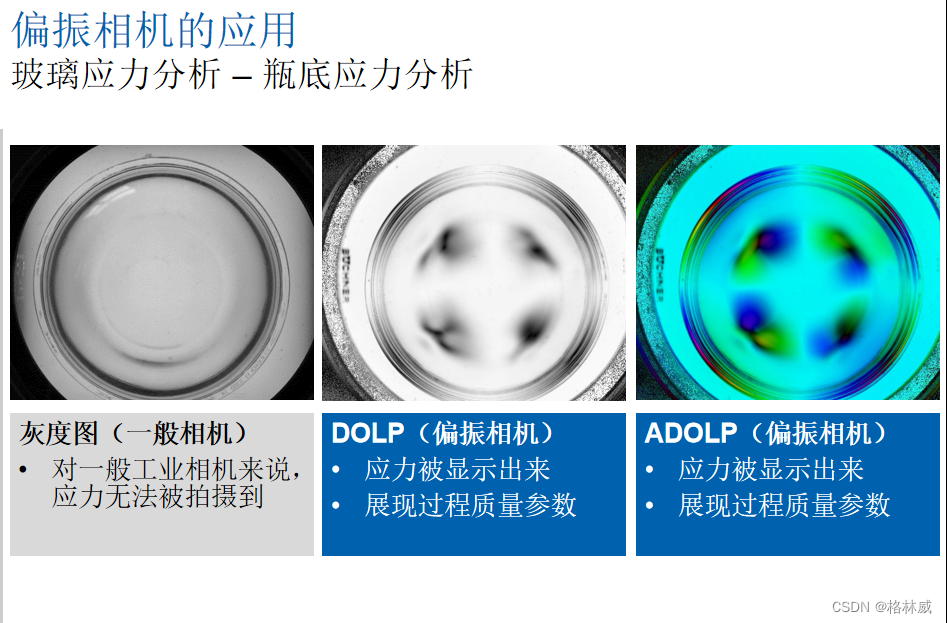
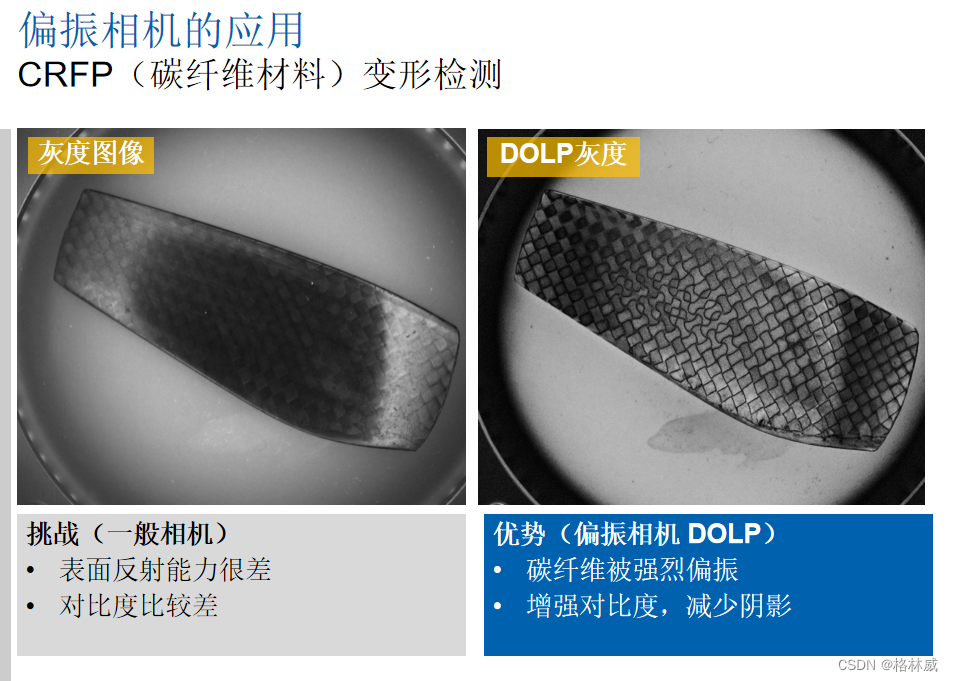
Baumer偏振相机的行业应用
偏光工业相机通常用于各种工业应用,如质量控制、缺陷检查、材料分析和表面检查。
它们有助于消除眩光和反射,提高玻璃、塑料、金属等各种材料的图像对比度和准确性。
偏光工业相机在检测隐藏的缺陷或污染物、识别材料中的应力点和检查隐藏结构方面也很有用。它们通常用于汽车、航空航天、电子和制造业等行业。
下面简单介绍几个能体现出偏振特性的行业应用: