ArduPilot之posHold&RTL实测
- 1. 源由
- 2. 模式配置
- 3. 测试步骤
- 4. 飞行实测
- 5. 总结
- 6. 参考资料
- 7. 附录-关于QGC 暂不支持MAVLink2 signing Protocol问题
- 7.1 问题描述
- 7.2 硬件配置
- 7.3 逻辑分析
- 7.4 配置Signature
- 7.5 总结(QGC目前尚不支持MAVLink2 Signature)
- 8. 附录-关于MAVLink2/Steam Rates和地面站的问题
1. 源由
鉴于ArduPilot-F450已经顺利完成以下两个动作:
- Step 1:ArduPilot Kakute F7 AIO DIYF450 without GPS配置 顺利stabilize起飞/降落成功
- Step 2: ArduPilot Kakute F7 AIO DIYF450 之GPS配置 GPS搜星成功ARM
接下来就是测试下无人机最为基础的两个功能:
- posHold: Position Hold
- RTL: Return To Launch
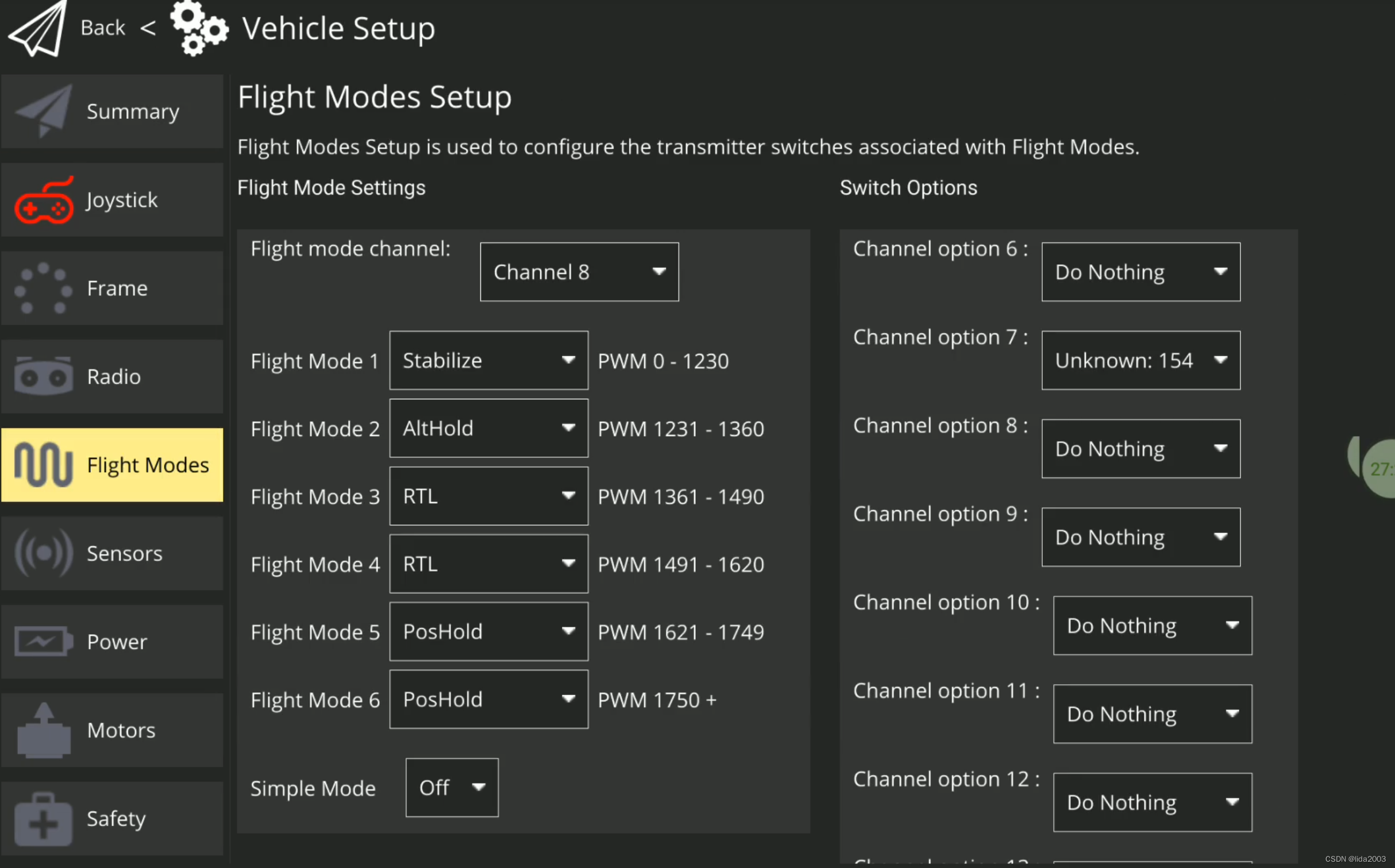
2. 模式配置
本次实验采用TX12上的两个摇杆(SA + SF)来模拟6个飞行模式。
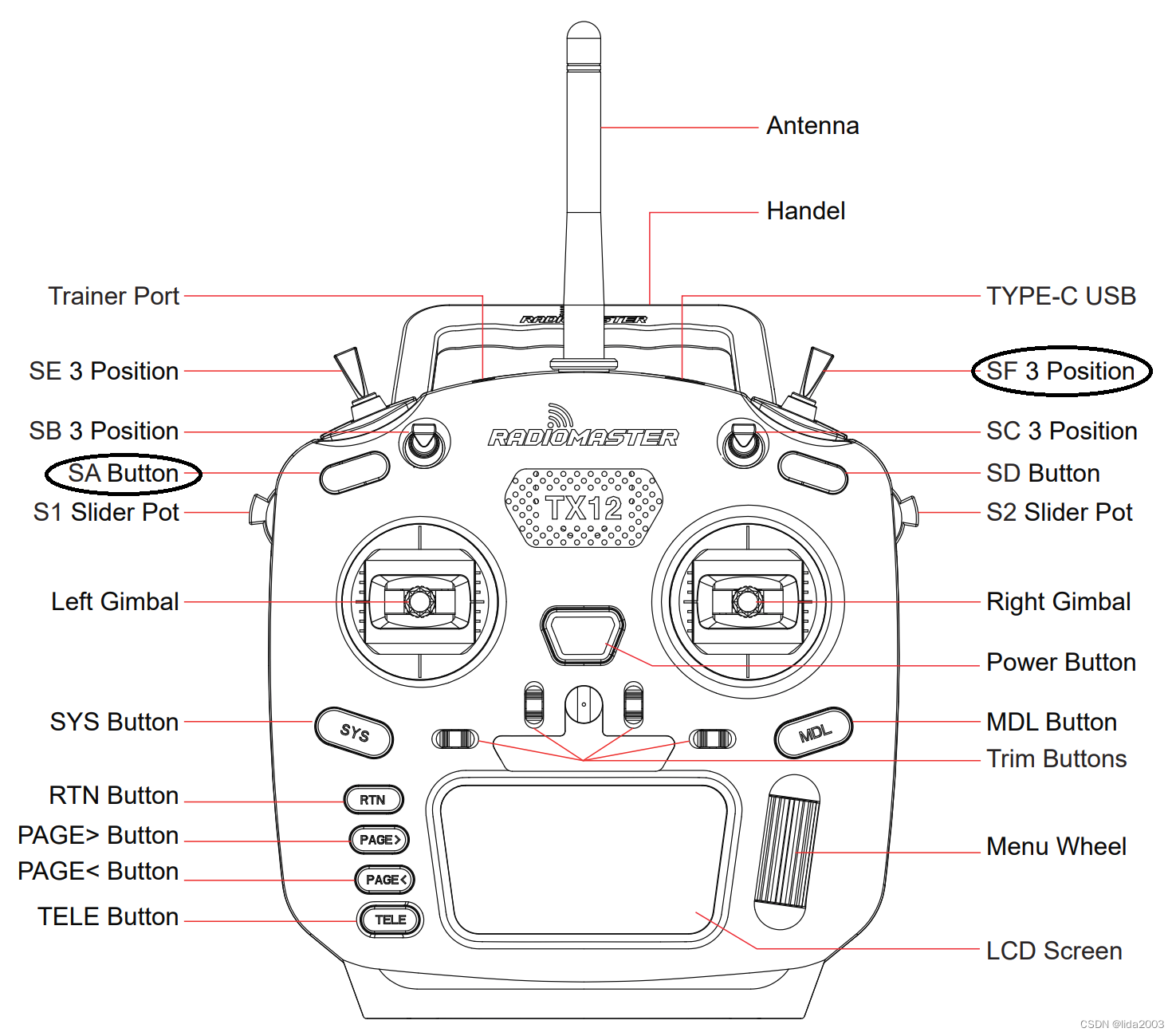
- SA(0) + SF (1) = stabilize
- SA(0) + SF (2) = AltHold
- SA(0) + SF (3) = RTL
- SA(1) + SF (1) = RTL
- SA(1) + SF (2) = posHold
- SA(1) + SF (3) = posHold
3. 测试步骤
- Step1: stabilize起飞
- Step2: 手动移动到悬停测试为止
- Step3: 切换AltHold
- Step4: 切换PosHold
- Step5: 测试完成,切换RTL返回降落
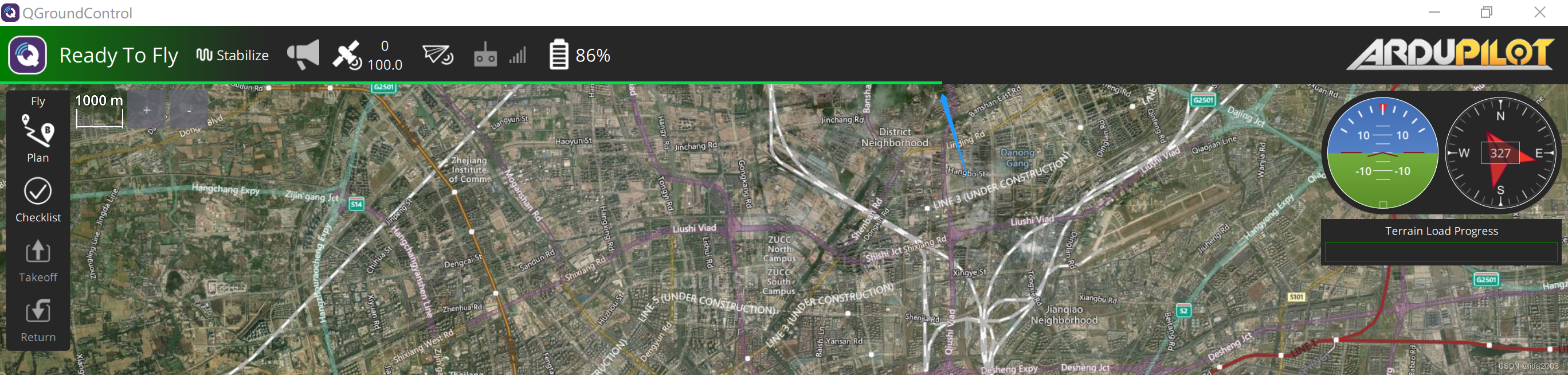
4. 飞行实测
动态视频,请参考:
ArduPilot-DIYF450-KakuteF7-AIO-posHold&RTL
5. 总结
阴雨天气,M8N GPS20颗卫星搜星3D Fix情况下:
- RTL有1米左右的误差
- posHold 短时间内漂移几乎感觉不到
整体感受不错,当然如果要更高精度的定位,可能需要考虑RTK GPS模块或者增加视觉定位。
6. 参考资料
【1】ArduPilot开源飞控系统之简单介绍
【2】ArduPilot之开源代码框架
【3】ArduPilot Kakute F7 AIO DIYF450 without GPS配置
【4】ArduPilot Kakute F7 AIO DIYF450 之GPS配置
7. 附录-关于QGC 暂不支持MAVLink2 signing Protocol问题
7.1 问题描述
测试过程,QGC连接飞控经常会在这个位置卡主。
然后弹出以下对话框。
出现该界面,会导致飞控设备无法进行配置,比如:修改failsafe策略等。
7.2 硬件配置
3DR Radio Telemetry V5 433MHz/57600bps 100mW

7.3 逻辑分析
PX4模块设计之四:MAVLink简介中,以前分析过相关内容:


是不是后面的signature加密导致了QGC无法解析????
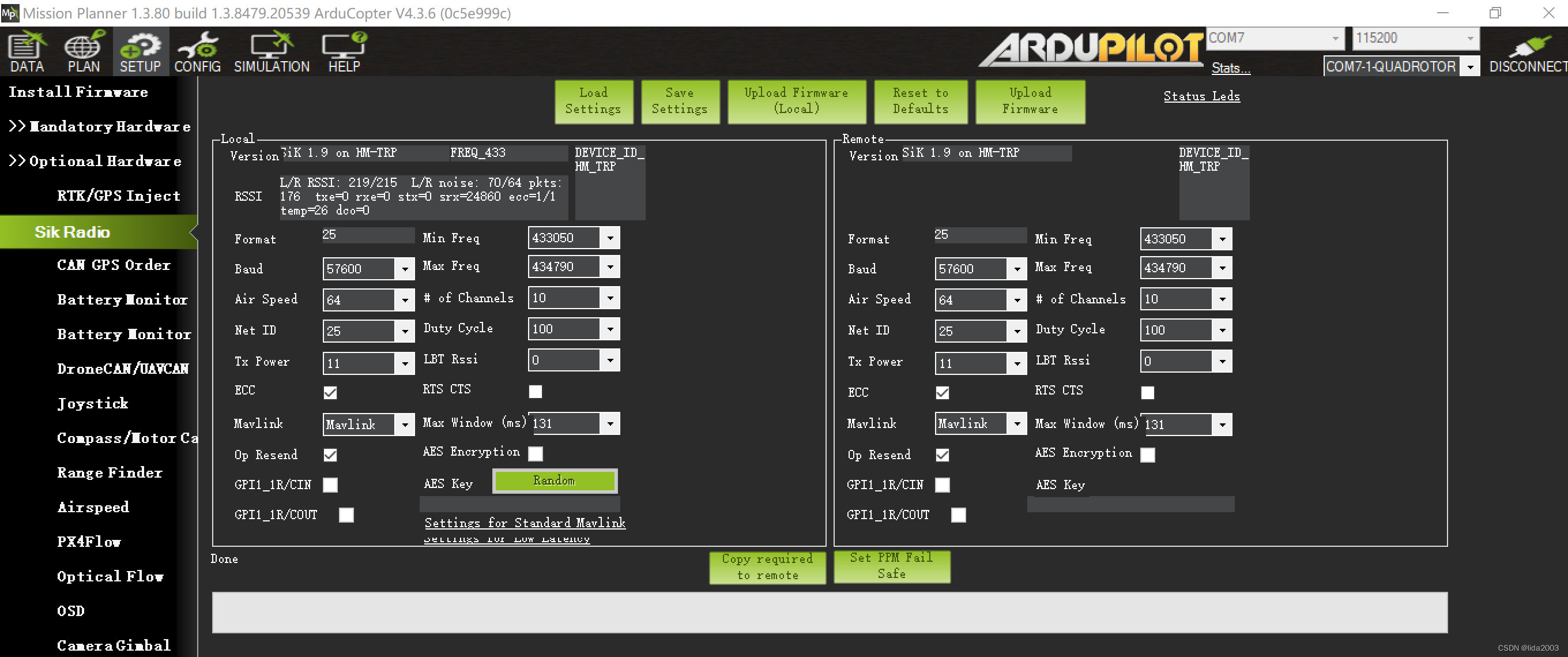
7.4 配置Signature
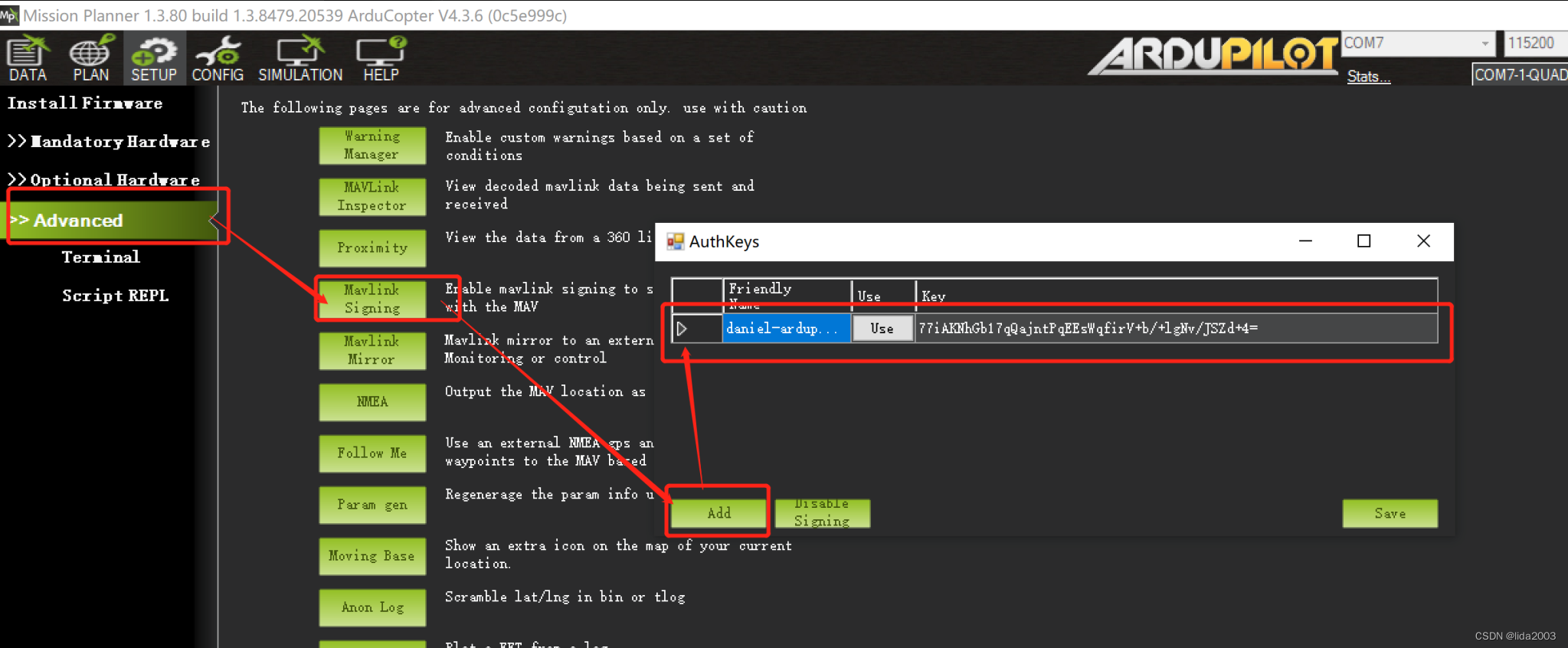
测试结果:
- Mission Planner上一直没有问题(无论是否配置上述signature)
- QGC上问题依旧,MP上配置了,但是QGC到底是哪里配置,一直没有找到。
- 搜索后发现: Add Support for MAVLink2 Message Signing #8958 有过讨论,不过貌似主干上,并没有合入。
7.5 总结(QGC目前尚不支持MAVLink2 Signature)
配置使用MAVLink1, QGC使用一切正常。
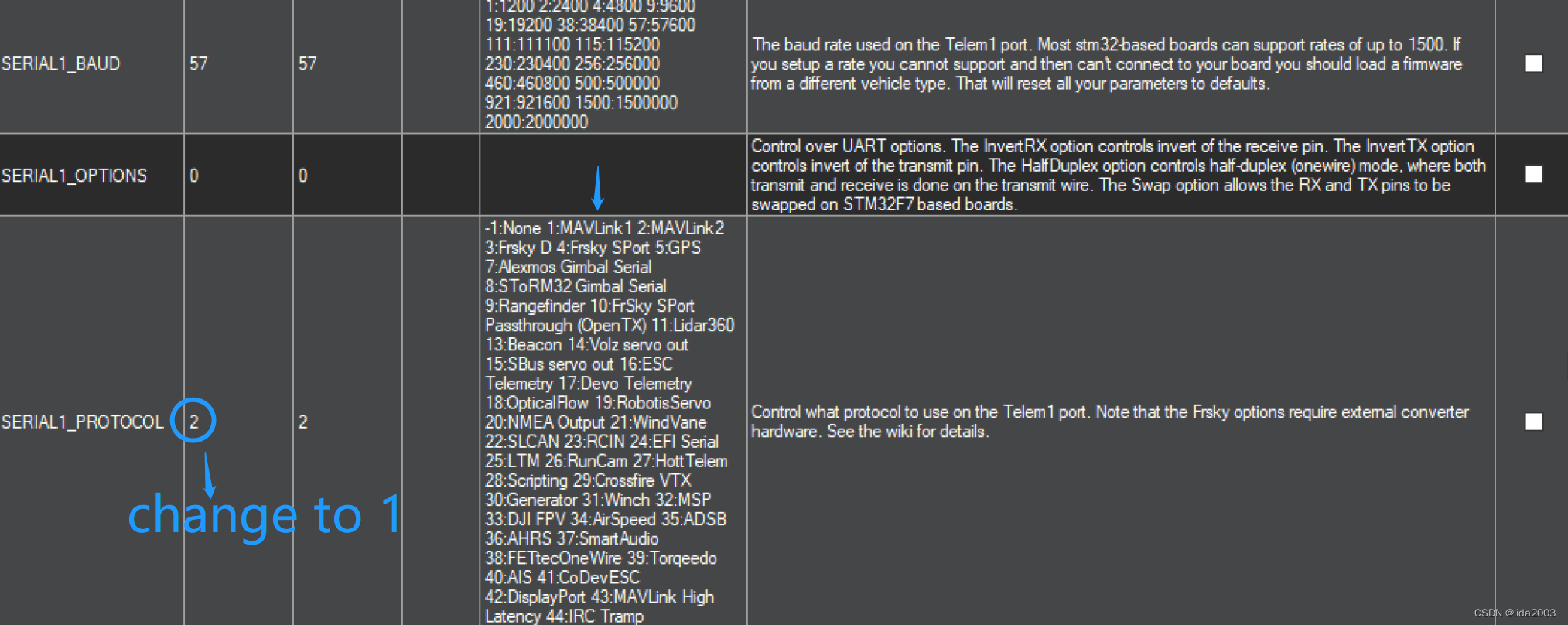
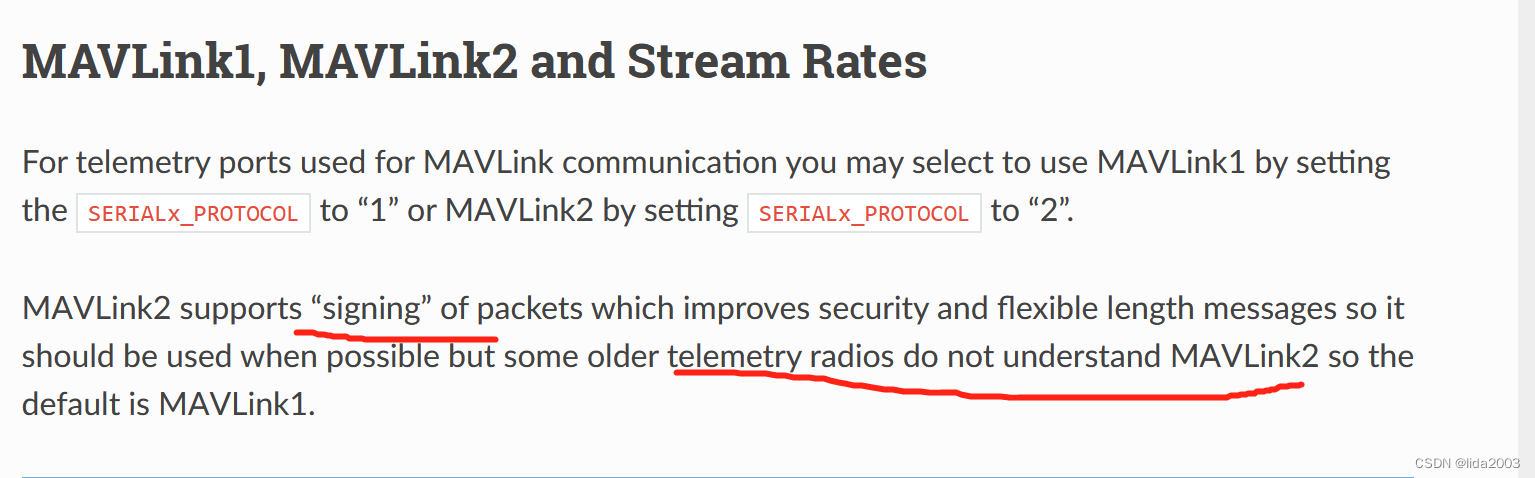
8. 附录-关于MAVLink2/Steam Rates和地面站的问题
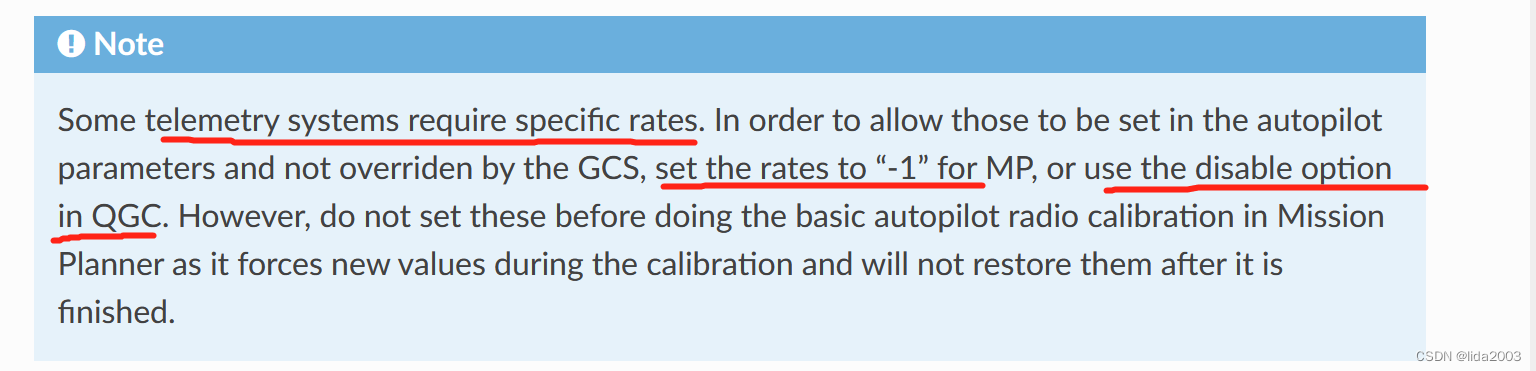
Telemetry / Serial Port Setup 中有如下描述,请根据地面站软件的支持情况,适当调整配置参数。