PWM 呼吸灯实验
FPGA实现一个PWM模块(硬件)来控制灯的亮灭。
实验原理
PWM本质上就是一个输出脉冲的硬件,通过改变一个周期高电平(占空比)的时间来对其他的硬件进行控制,比如电机。
呼吸灯的实现利用了人眼的视觉特性,控制灯亮和暗的间隔时间就形成了对灯亮度的调节。
通过一个N比特的计数器(溢出相当于从0开始)和一个值就可以实现一个占空比可调的脉冲输出。
实验步骤
- 设计PWM模块
- 用硬件描述语言实现设计
- 查看硬件设计,添加管脚约束和时钟约束
- 本地仿真
- 上板验证
实验记录
- 设计PWM模块
| 信号名称 | 方向 | 说明 |
|---|---|---|
| clk | in | 时钟输入 |
| rst | in | 异步输入复位,高有效 |
| period | in | PWM 脉宽周期(频率)控制。实际是每次计数的步进值,根据系统输入时钟可以计算出pwm输出频率 |
| duty | in | 占空比,小于该值时输出低电平,否则输出高电平 |
| pwm_out | out | pwm输出 |
- 用硬件描述语言实现设计
ax_pwm.v
`timescale 1ns / 1ps
module ax_pwm
#(
parameter N = 16
)
(
input clk,
input rst,
input [N-1:0] period,
input [N-1:0] duty,
output pwm_out
);
reg[N-1:0] period_r;
reg[N-1:0] duty_r;
reg[N-1:0] period_cnt;
reg pwm_r;
assign pwm_out = pwm_r;
always @(posedge clk or posedge rst)
begin
if(rst==1)
begin
period_r <= {N{1'b0}};
duty_r <= {N{1'b0}};
end
else
begin
period_r <= period;
duty_r <= duty;
end
end
always @(posedge clk or posedge rst)
begin
if(rst==1)
period_cnt <= {N{1'b0}};
else
period_cnt <= period_cnt + period_r;
end
always @(posedge clk or posedge rst)
begin
if(rst==1)
begin
pwm_r <= 1'b0;
end
else
begin
if(period_cnt >= duty_r)
pwm_r <= 1'b1;
else
pwm_r <= 1'b0;
end
end
endmodule
PWM测试模块
`timescale 1ns / 1ps
module pwm_test(
input sys_clk_p, // 时钟是一个200MHz的差分时钟
input sys_clk_n,
input rst_n, // 复位由一个按键来控制,按键默认状态为高,所以低复位
output wire led // 输出给led
);
localparam CLK_FREQ = 200 ; //200MHz,周期为 1s/200MHz = 1/200 us
localparam US_COUNT = CLK_FREQ ; //1 us counter,200个时钟周期是1us
localparam MS_COUNT = CLK_FREQ*1000 ; //1 ms counter 1个ms的周期计数
localparam DUTY_STEP = 32'd100000 ; //duty step, 占空比调整大小,单次调整 100000/2^32 = 0.000000000232
localparam DUTY_MIN_VALUE = 32'h6fffffff ; //duty minimum value, 最小占空比 0.437
localparam DUTY_MAX_VALUE = 32'hffffffff ; //duty maximum value, 最大占空比 0.999
localparam IDLE = 0; //IDLE state
localparam PWM_PLUS = 1; //PWM duty plus state
localparam PWM_MINUS = 2; //PWM duty minus state
localparam PWM_GAP = 3; //PWM duty adjustment gap
wire pwm_out; //pwm output
reg[31:0] period; //pwm step value
reg[31:0] duty; //duty value
reg pwm_flag ; //duty value plus and minus flag, 0: plus; 1: minus
reg[3:0] state;
reg[31:0] timer; //duty adjustment counter 该测试模块计数的
assign led = ~pwm_out ; //led low active
wire clk;
// 差分转单端
IBUFDS IBUFDS_inst(
.O(clk),
.I(sys_clk_p),
.IB(sys_clk_n)
);
always@(posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
begin // 复位,设置初始值
period <= 32'd0;
timer <= 32'd0;
duty <= 32'd0;
pwm_flag <= 1'b0 ;
state <= IDLE;
end
else
case(state)
IDLE:
begin
// N位计数器,CLK Hz的时钟(周期1/CLK s),要输出n Hz的PWM波,PWM周期为1/n s,要在一个PWM周期计数完一轮,而一个周期会计数((1/n)/(1/CLK))次
// 2^N/((1/n)/(1/CLK)) = 2^32*n/CLK
// 这个地方的时钟写的50M,PWM是800Hz的,周期0.00125s。
period <= 32'd17179; //The pwm step value, pwm 200Hz(period = 200*2^32/50000000)
state <= PWM_PLUS;
duty <= DUTY_MIN_VALUE;
end
PWM_PLUS :
begin
if (duty > DUTY_MAX_VALUE - DUTY_STEP) //if duty is bigger than DUTY MAX VALUE minus DUTY_STEP , begin to minus duty value
begin
pwm_flag <= 1'b1 ;
duty <= duty - DUTY_STEP ;
end
else
begin
pwm_flag <= 1'b0 ;
duty <= duty + DUTY_STEP ;
end
state <= PWM_GAP ;
end
PWM_MINUS :
begin
if (duty < DUTY_MIN_VALUE + DUTY_STEP) //if duty is little than DUTY MIN VALUE plus duty step, begin to add duty value
begin
pwm_flag <= 1'b0 ;
duty <= duty + DUTY_STEP ;
end
else
begin
pwm_flag <= 1'b1 ;
duty <= duty - DUTY_STEP ;
end
state <= PWM_GAP ;
end
PWM_GAP:
begin
if(timer >= US_COUNT*100) //adjustment gap is 100us
begin
if (pwm_flag)
state <= PWM_MINUS ;
else
state <= PWM_PLUS ;
timer <= 32'd0;
end
else
begin
timer <= timer + 32'd1;
end
end
default:
begin
state <= IDLE;
end
endcase
end
ax_pwm
#(
.N(32)
)
ax_pwm_m0(
.clk(clk),
.rst(~rst_n),
.period(period),
.duty(duty),
.pwm_out(pwm_out)
);
endmodule
- 查看硬件设计,添加管脚约束和时钟约束
约束文件
set_property PACKAGE_PIN AE15 [get_ports led]
set_property PACKAGE_PIN AE14 [get_ports rst_n]
set_property PACKAGE_PIN AE5 [get_ports sys_clk_p]
set_property IOSTANDARD LVCMOS33 [get_ports led]
set_property IOSTANDARD LVCMOS33 [get_ports rst_n]
set_property IOSTANDARD DIFF_SSTL12 [get_ports sys_clk_p]
create_clock -period 5.000 -name sys_clk_p -waveform {0.000 2.500} [get_ports sys_clk_p]
- 本地仿真
激励文件
`timescale 1ns / 1ps
module pwm_test_tb;
// Inputs
reg sys_clk_p;
wire sys_clk_n;
reg rst_n;
wire led ;
// Instantiate the Unit Under Test (UUT)
pwm_test uut (
.sys_clk_p(sys_clk_p),
.sys_clk_n(sys_clk_n),
.rst_n (rst_n),
.led (led)
);
initial begin
// Initialize Inputs
sys_clk_p = 0;
rst_n = 0;
// Wait 100 ns for global reset to finish
#100;
rst_n = 1;
end
always #2.5 sys_clk_p = ~ sys_clk_p; //5ns一个周期,产生200MHz时钟源
assign sys_clk_n = ~ sys_clk_p;
endmodule
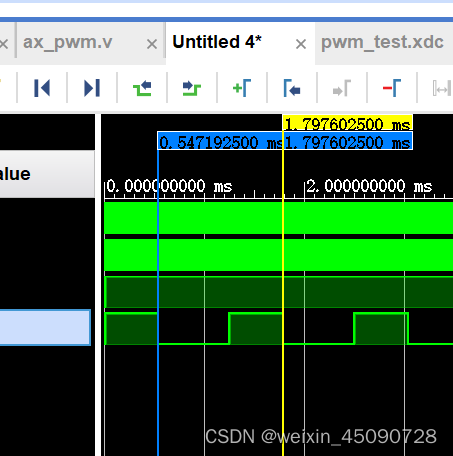
这里的PWM周期为1.25ms,和前面的分析相符。
- 上板验证
加载后会产生类似流水灯的效果。
实验总结
- 时钟很重要,是硬件系统的心跳,有了时钟硬件才可以动起来。如果PWM模块没有时钟输入的话,就无法被驱动,无法正常工作。另外设计的时候不考虑时钟,将会无从下手。
- 逻辑调试和软件调试虽然形式有所不一样,但本质都是相同的,需要一级一级的分析问题出在哪里,不能慌张。
- 本地调试很有必要,可以看到更详细的信号,有利于找出问题。
问题记录
- 时序约束没让添加时钟的约束,不知道什么原因,手动添加。
- 上板的时候流水灯没亮,本地仿真发现led是一个蓝色的线,发现原因是少了一行assign语句,没把pwm的输出接出去。
参考资料
- PWM原理 PWM频率与占空比详解
- Xilinx 7系列SelectIO结构之IO标准和端接匹配(三)
- XILINX 原语的使用之 IBUFDS 差分转单端、OBUFDS 单端转差分