目录
前言
1.高速列车模型
2.优化算法优化模糊PID流程
3.普通PID、优化算法模糊PID仿真对比
3.1 模糊控制器设计
3.2 仿真结果
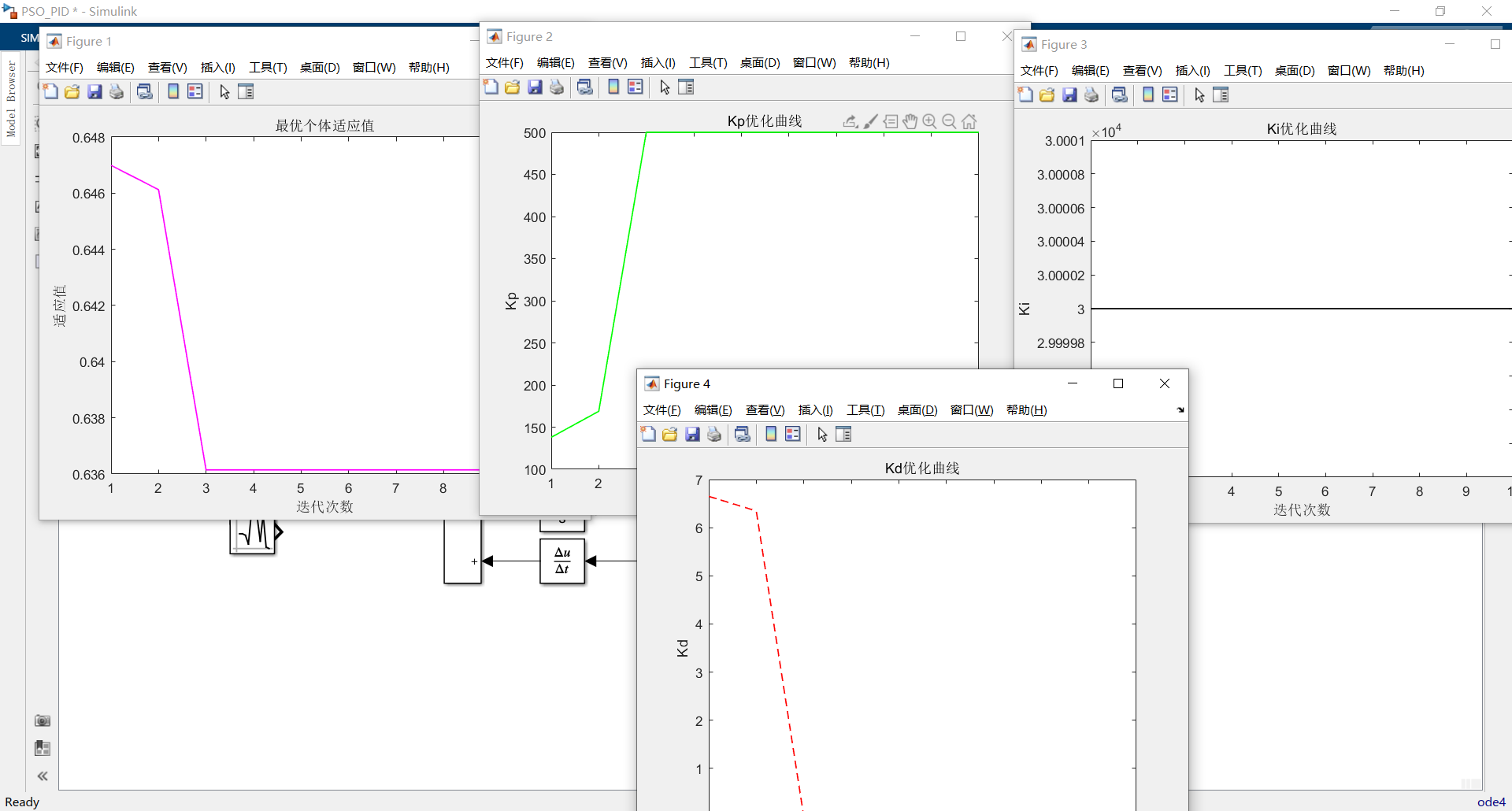
3.2.1粒子群优化PID
3.2.2粒子群优化模糊PID
3.2.3遗传算法优化模糊PID
4.总结
前言
高速列车,是指最高行驶速度在200km/h 及以上的列车。高速列车是当代多种尖端科技在交通领域上的充分运用,是第三次工业革命下诞生的新型高科技陆地运输工具,具有速度快、运量大、安全舒适和清洁环保等诸多优点。
高速列车的平稳快速运行,离不开列车的悬挂系统。由于行驶中的列车会受到轨道不平顺的影响以及空气动力的作用、牵引力和制动力等的作用,因此列车将会做多自由度的随机振动,对列车的安全性和舒适性造成不良影响。因此悬挂系统不仅能够连接车体与转向架,传递车轮和车架之间的力和力扭,还够缓冲路面传给车架或车身的冲击力,减少震动以保证列车平顺地行驶。
目前国内外高速列车发展日新月异,列车悬挂结构越来越多,控制系统越来越复杂。因此本文介绍了常规PID控制、粒子群优化模糊PID控制在3自由度横向高速列车上的应用。
1.高速列车模型
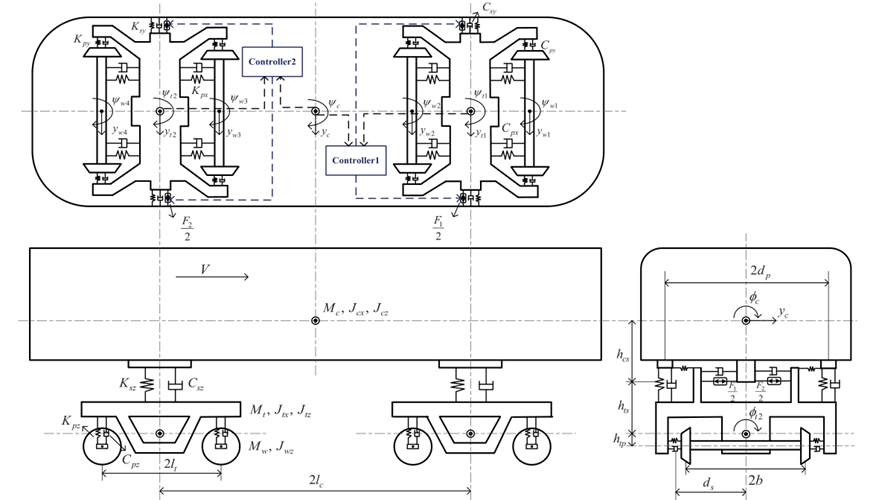
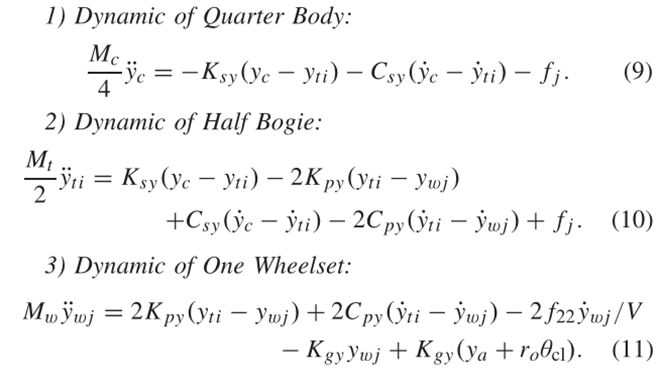
以上模型和公式来自参考文献:
Deqing, Huang, Chunrong, et al. An Active Repetitive Learning Control Method for Lateral Suspension Systems of High-Speed Trains[J]. IEEE transactions on neural networks and learning systems, 31(10):4094-4103.
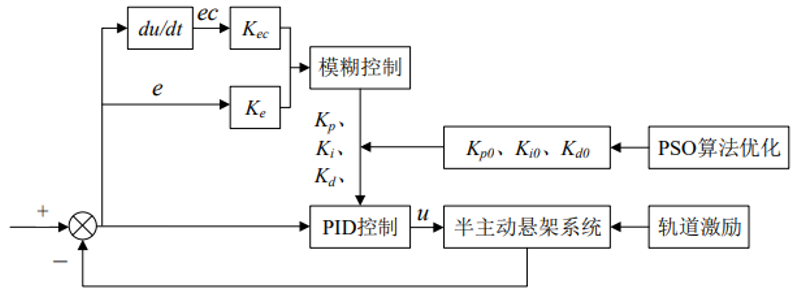
2.优化算法优化模糊PID流程
这里以粒子群算法优化模糊PID的初值为例,给出如下优化流程图:
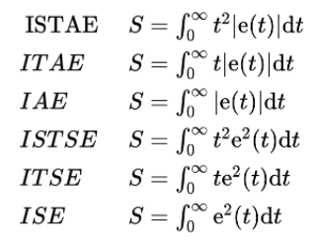
选用如下的一种性能优化指标:
3.普通PID、优化算法模糊PID仿真对比
3.1 模糊控制器设计
定义e、ec、Δkp、Δki、Δkd的隶属度函数和模糊论域:
由于三角隶属度函数简单效果不错,所以均选择三角隶属度函数:
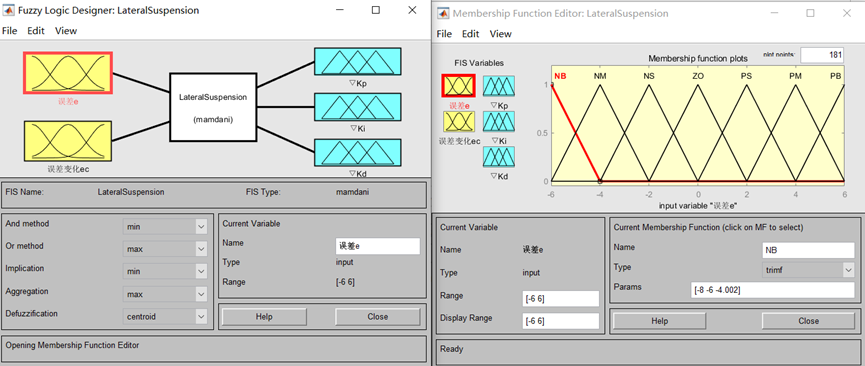
论域选择:
e∈[-6 6]、ec∈[-6 6] 、Δkp∈[-3 3]、 Δki∈[-0.06 0.06] 、Δkd∈[-0.3 0.3]
注:关于更多模糊逻辑模块使用,可以查看我的csdn博客: VSC/SMC(十五)——基于模糊逼近的积分滑模控制_Mr. 邹的博客-CSDN博客_积分滑模面的优势
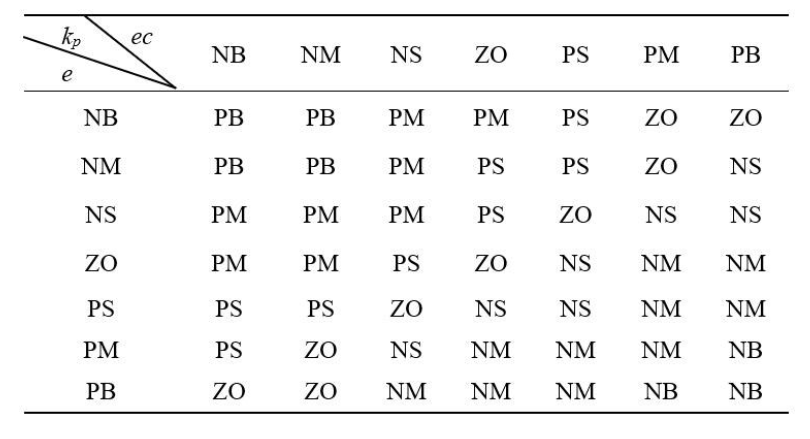
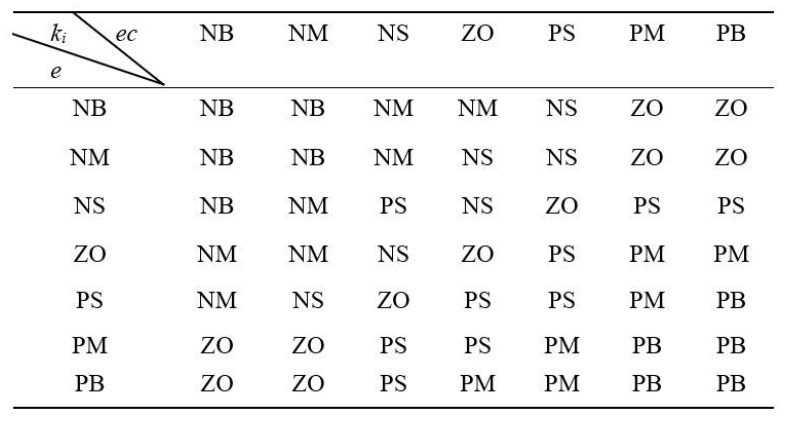
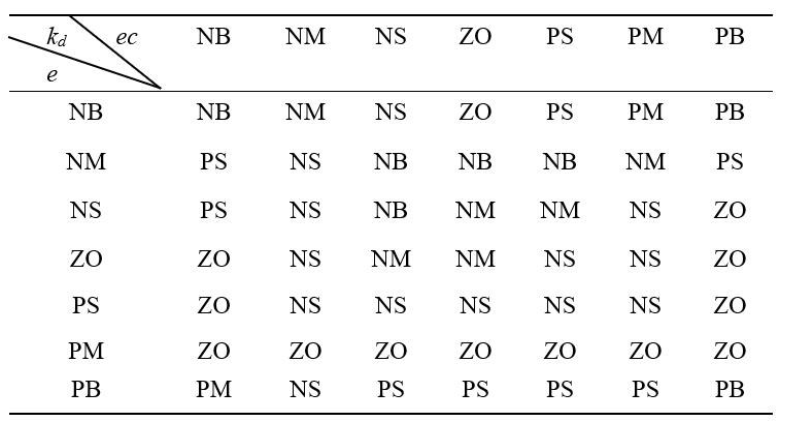
模糊规则:
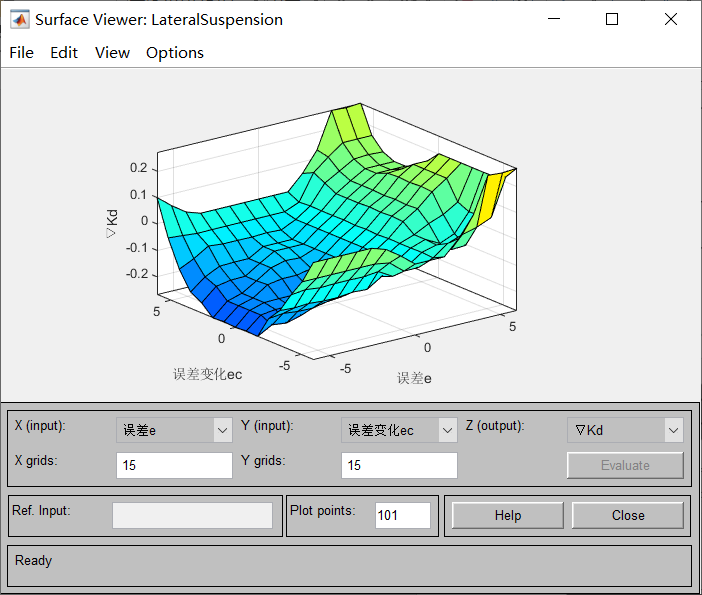
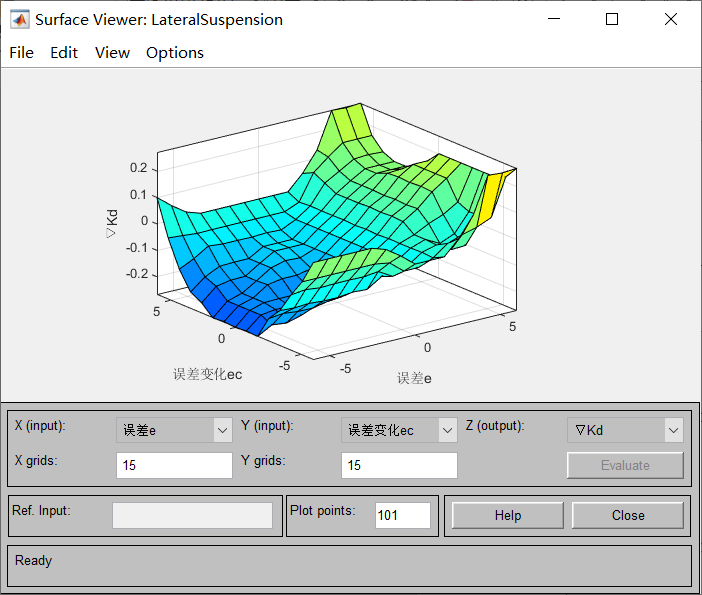
模糊输入输出关系曲面:

3.2 仿真结果
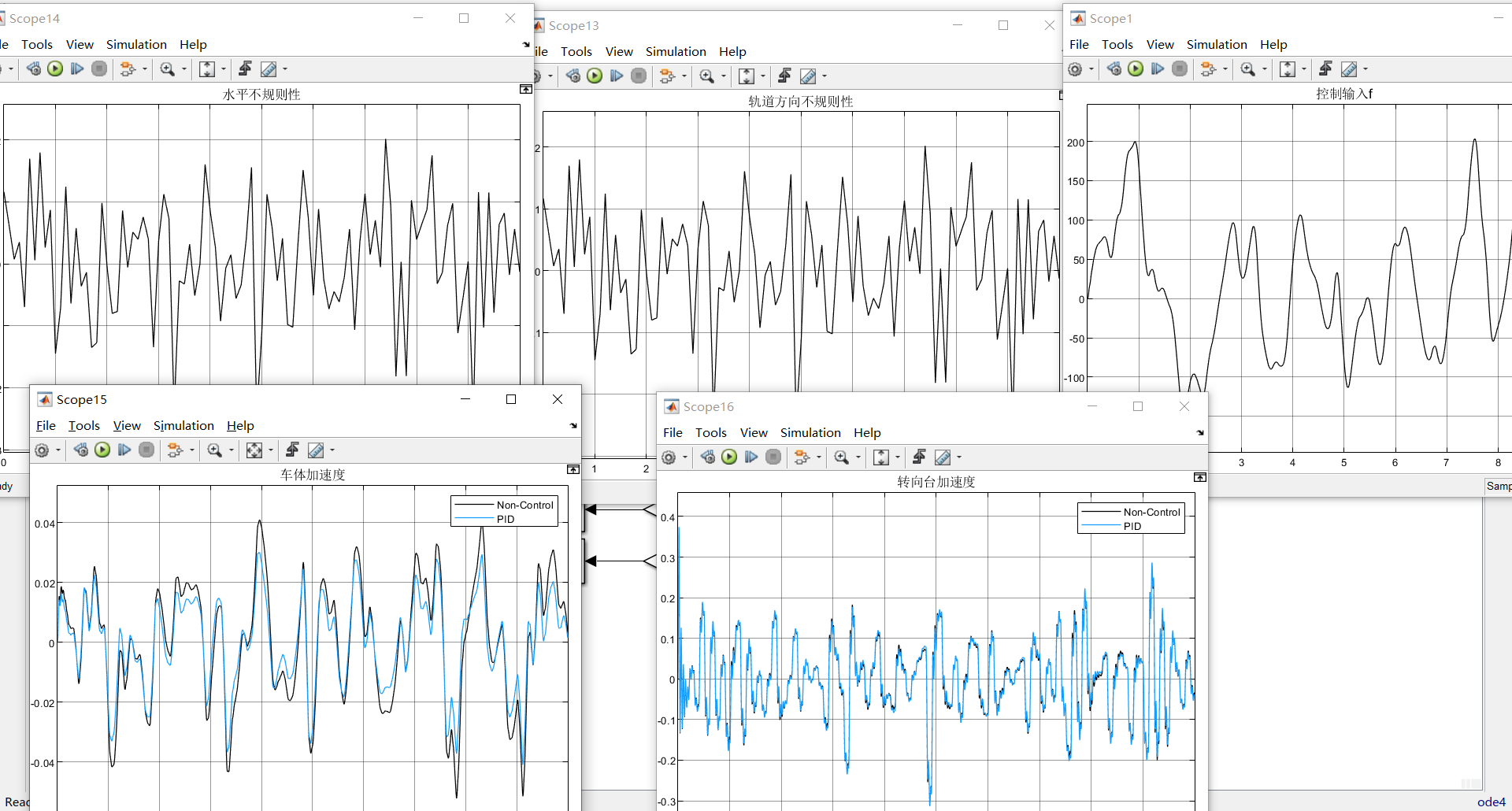
3.2.1粒子群优化PID
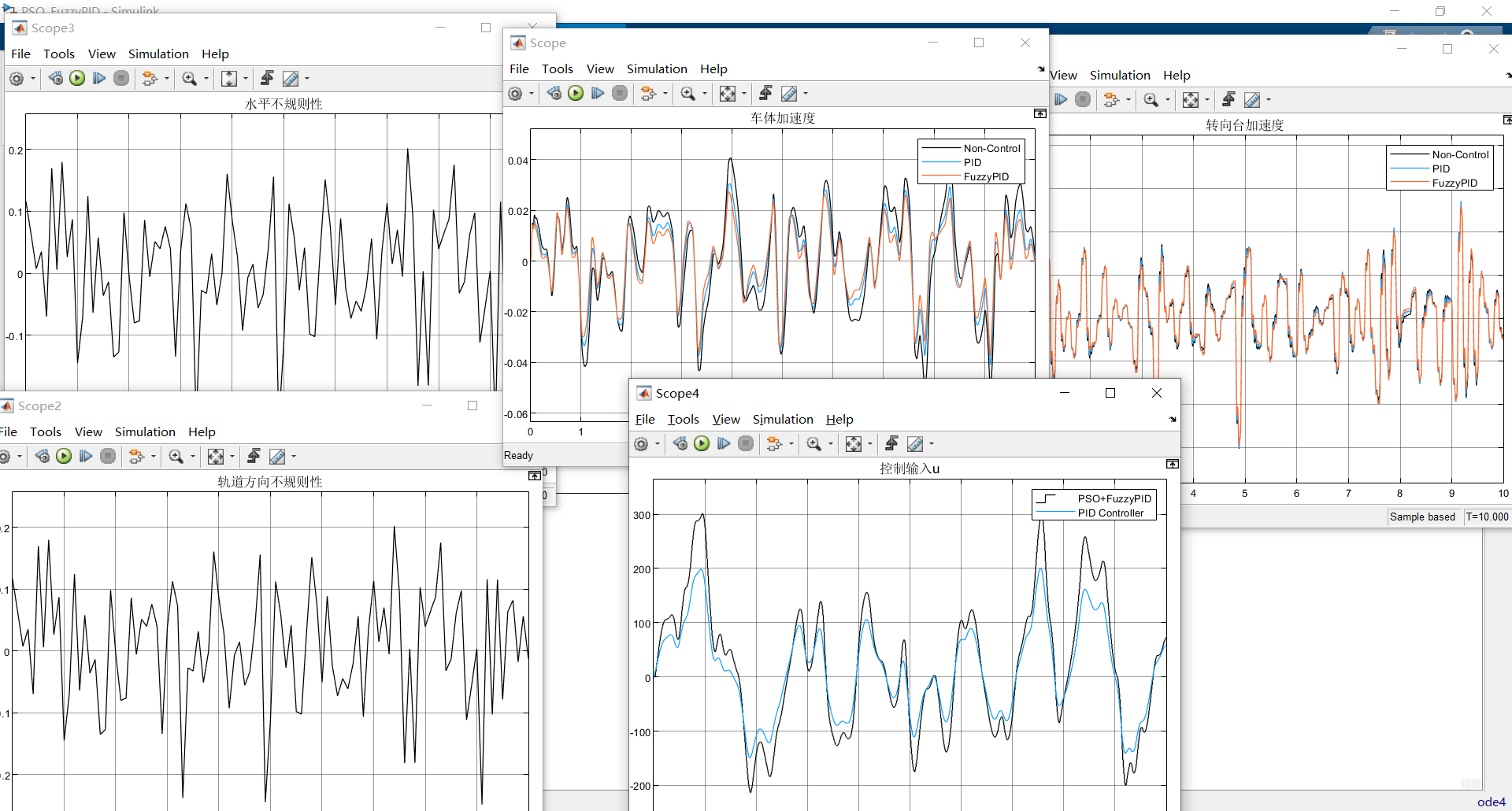
3.2.2粒子群优化模糊PID
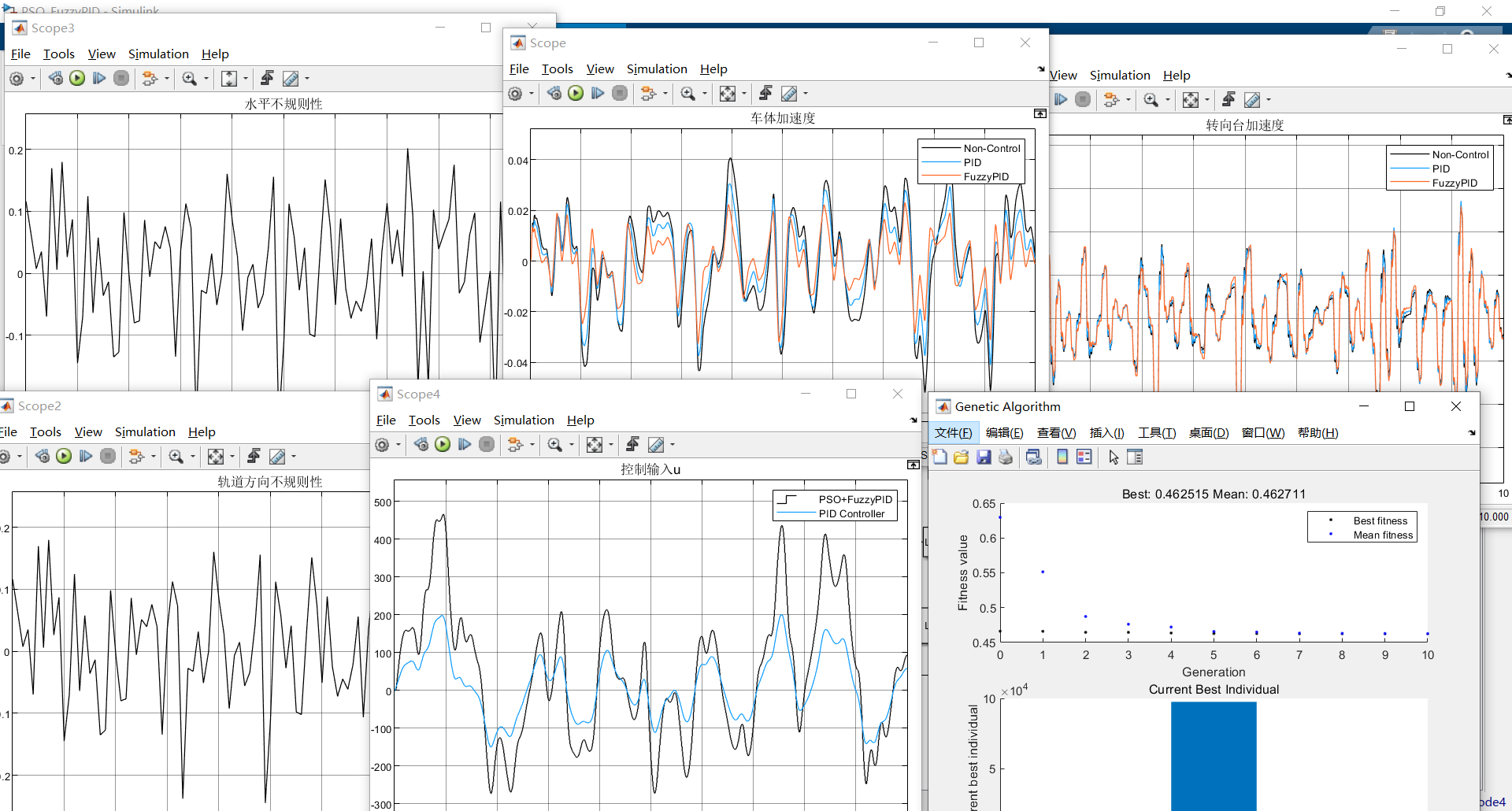
3.2.3遗传算法优化模糊PID

4.总结
可以看到基于优化算法的模糊PID控制效果是最好的,将横向车体加速度大大降低,提高乘员舒服性。
参考文献:
[1]Deqing, Huang, Chunrong, et al. An Active Repetitive Learning Control Method for Lateral Suspension Systems of High-Speed Trains[J]. IEEE transactions on neural networks and learning systems, 31(10):4094-4103.
[2]张瑞东. 基于自适应模糊PID方法的动车组横向振动控制研究[D]. 兰州交通大学.

![[附源码]Python计算机毕业设计SSM流浪猫狗救助站(程序+LW)](https://img-blog.csdnimg.cn/18cbe3eb6baa4b1e9eb0a81b5f9dae51.png)