ISO 16787是做什么的?
ISO 16787全称为智能运输系统-辅助泊车系统(APS)-性能要求和测试程序,其中主要描述了对APS系统的功能要求及测试规范
APS类型
根据目标停车位类型将APS系统分为两类:
1)APS类型I:目标车位为两车之间的间隙
2)APS类型II:目标车位由标记(如:画线)定义
对于以上两种类型,平行和垂直车位都有可能
一般要求
工作期间的最大速度
建议在辅助泊车期间限制速度范围,并在驾驶员超过此限制时为安全起见中止辅助泊车模式。速度限制的建议范围为(前进:10公里/小时;倒车:7公里/小时至12公里/小时)
APS退出条件
如果下列一个或多个条件满足,APS应中止辅助泊车模式:
-驾驶员操纵方向盘以接管控制。方向盘的最小扭矩应由OEM确定。典型值可能约为5Nm
-APS检测到系统内部故障
-车辆超过辅助泊车模式的速度限制
系统应取消自动转向控制,并在检测到故障时向驾驶员提供声音和视觉信息
咨询说明
APS旨在检测合适的停车位,并在停车操纵过程中操纵车辆。建议在车辆操作员手册(车主手册)中包含一份咨询说明,明确说明如何使用系统,并说明中止条件、驾驶员责任和系统限制。
在驶入停车位时,应特别提醒驾驶员其安全责任。这包括注意APS可能检测不到的障碍物和其他可能的危险。特别是在垂直停车位的情况下,驾驶员应确保停车位的深度足够。如果系统检测到不安全状况应建议驾驶员不要开始操纵或立即接管对车辆运动的控制
APS还应帮助驾驶员在操纵进入停车位时识别障碍物。MALSO(150 17386)、ERBA(ISO 22840)国际标准或后视摄像头系统描述了此类系统的示例
APS 类型I
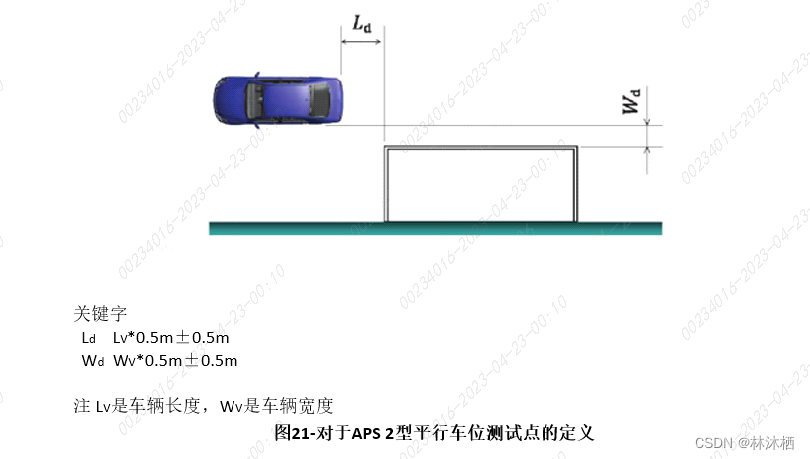
I类平行停车位
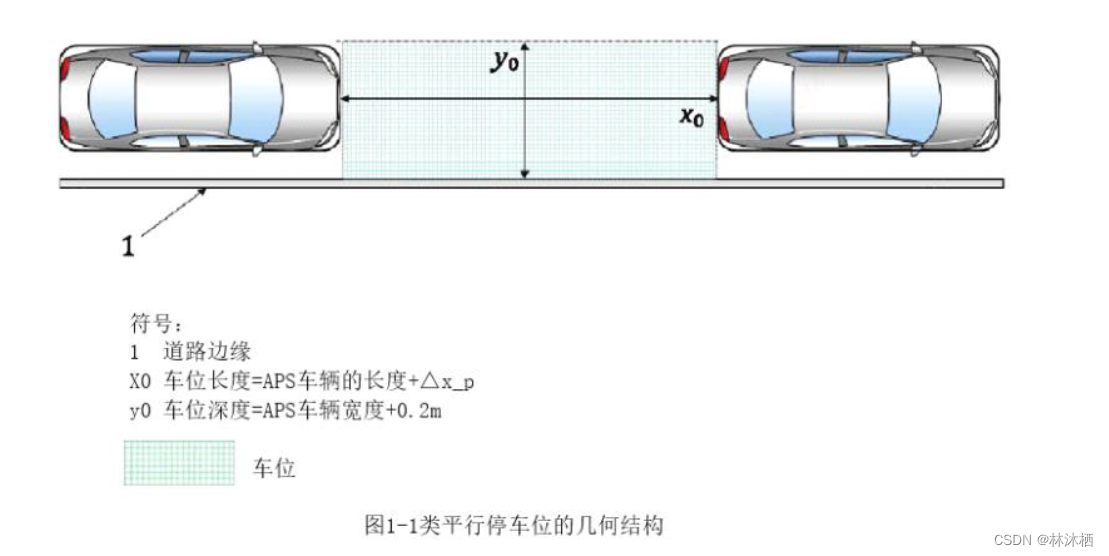
泊车操纵应使用两辆与APS车辆型号相似的车辆限定的停车位和一个可选的路缘作为横向参考。建议系统能够检测参考路缘,如图中描述的一样
建议将边界车辆沿相同方向对齐并相互平行。文件中将停车位长度x0定义为APS车辆的长度加上△x_p,车位深度yo定义为APS车辆的宽度加上0.2 m。对于测试泊车场景,考虑两种情况,有或没有基准路缘。在参考路缘的情况下,车辆以与之平行的固定距离停放。在没有路缘石的情况下,投影到地面上的停放车辆外部边界之间的虚拟连接线是横向参考线
停车位由其长度xo与其深度yo定义(如图一所示:Xo是两个参考车辆之间的距离,深度yo是参考车辆的外边界线与路缘石之间的距离)
对于长度在4m到6m之间的APS车辆,△x_p等于车辆长度乘以0.25,对于小型车辆(≤4m),△x_p=4x0.25=1m,对于大型车辆(≥6m),△x_p=6x0.25=1.5m
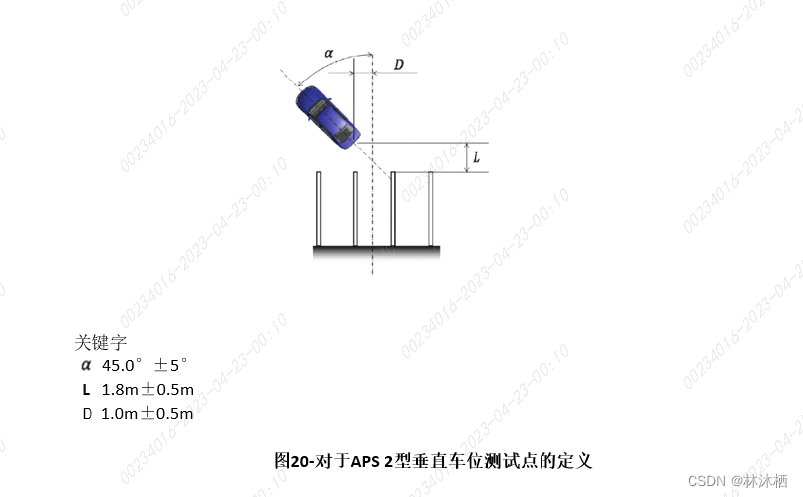
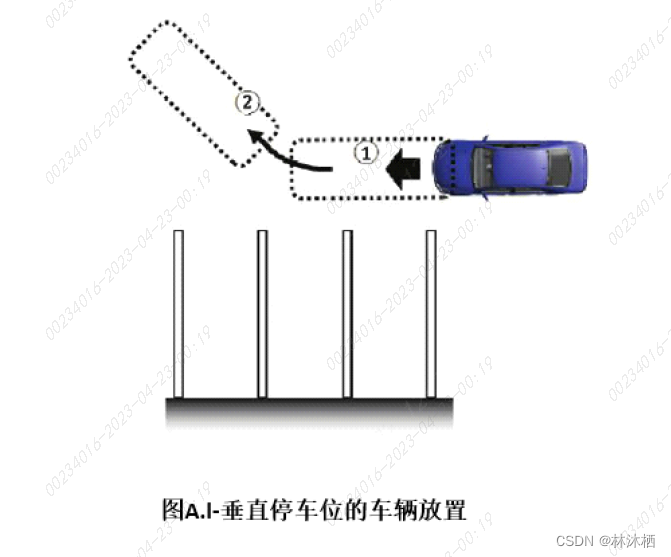
I类垂直停车位
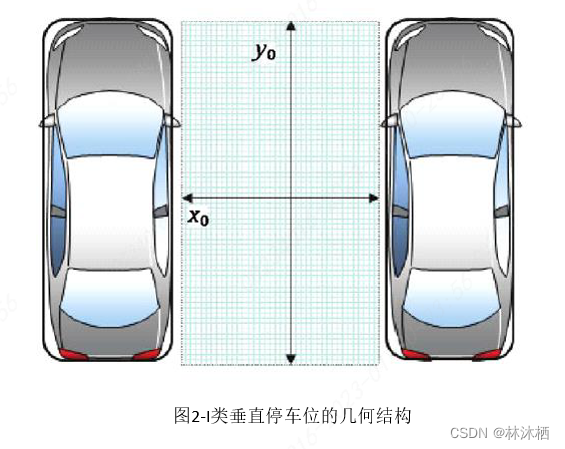
作为最低要求,泊车操纵应在停车位受限的情况下进行,停车位受限于两辆与APS车辆模型相似的车辆。使用不同类型的车辆也可以证明符合本文件
对于本文件,建议将边界车辆与APS车辆在其目标位置的相同方向对齐,并相互平行。停车位宽度X0定义为APS车辆的宽度加上△x_l,停车位深度y0定义为APS车辆的长度。△x_l=1.2m.见图2
APS工作顺序
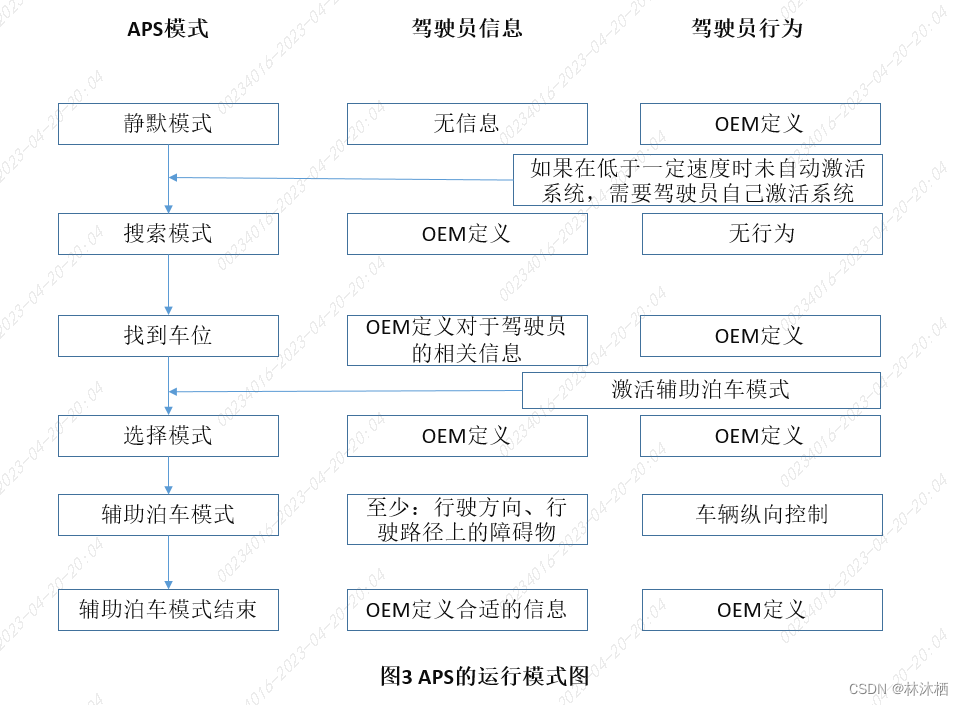
静默模式
APS类型1:如果未满足激活条件,APS不得执行任何操作
搜索模式
APS类型1:低于一定速度Vsearch_max,如果满足激活条件,APS将开始在环境中搜索合适的停车位。系统应能够在驾驶员和乘客侧的方向上搜索和停车。根据系统设计,驾驶员可以在停车位搜索期间选择支持的停车位类型(例如,仅垂直平行或垂直、仅驾驶员侧、驾驶员和乘客一侧等)。由于传感系统的物理限制,停车位内可能存在APS未检测到的障碍物,但可能会干扰检测到的停车位。此外,在垂直停车位的情况下,障碍物检测系统可能无法覆盖整个停车位深度。
找到车位
APS类型1:系统应通知驾驶员发现的潜在合适停车位。在继续下一步之前,驾驶员需要检查停车位是否有障碍物
选择模式
APS类型1:当车辆到达可以泊车辅助的位置时,APS通知驾驶员
辅助泊车模式
1.当驾驶员决定将车停在合适的停车位并停止车辆时,APS应在停车操纵过程中通过操纵转向系统向驾驶员提供建议。系统支持停车操纵的能力取决于APS车辆相对于停车位的实际启动位置。允许启动位置的限制应在车辆的车主手册中说明。
2.在车辆停止前,不得启动转向装置。
3.驾驶员应能够通过在任何时候接管APS车辆的横向控制来完成停车操纵。在这种情况下,APS应立即终止转向控制
辅助泊车模式结束
泊车操纵完成或中止时,应通知驾驶员
人机交互界面
基本信息示例
1.系统可以根据当前模式给予驾驶员提示(例如:车位搜索、车位发现、辅助泊车模式、错误模式)并且应当提供指示给配置泊车操纵的驾驶员。作为最低要求,当自动转向释放或者辅助泊车操纵成功完成或者中断时,系统应当提供听觉信息给驾驶员
2.当方向盘自动转圈前,应当发出一种警示信息
搜索模式下的信息
在搜索模式下APS系统提供哪种信息,由车辆制造商负责定义
在发现车位到辅助泊车模式期间的信息
1.应将APS发现的合适车位告知驾驶员
2.车辆制造商有责任确定在进入辅助泊车模式之前找到合适的停车位时向驾驶员提供哪种信息
驾驶员请求
车辆制造商有责任确定驾驶员必须进行哪种行为以实现APS的横向控制。例如:如果不止一个可能的停车位可用,则驾驶员可能需要确认目标停车位的选择
辅助泊车期间的信息
1.当开始操纵进入停车位的所有先决条件都满足并且APS切换到辅助泊车模式时,应通知驾驶员。
2.当车辆处于辅助泊车模式时,需要向驾驶员提供以下信息或警告:
—— 释放自动转向时,系统应向驾驶员提供声音信息
——如果APS检测到故障,应通知驾驶员
——APS可在辅助泊车模式下向驾驶员提供附加信息,例如换档指令或行驶速度
辅助泊车结束的信息
当APS完成停车操纵并停止车辆横向控制时,应通知驾驶员(离开辅助泊车模式时,转向被释放)
最低性能要求
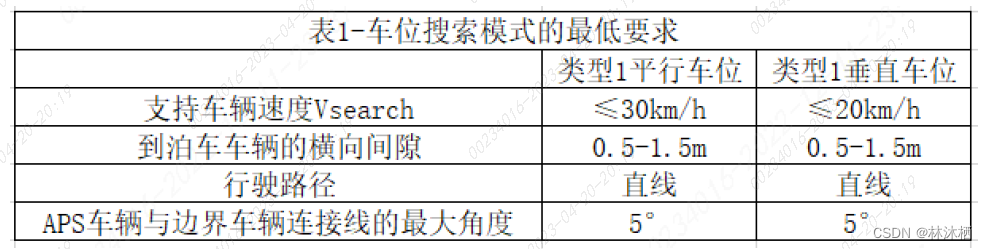
车位搜索模式下的性能要求
当系统处于车位搜索模式时,应满足表1中的最低系统要求:
辅助泊车模式下的性能要求
速度要求
1.APS类型1:在泊车操纵的某些部分,支持的最大速度应至少为5 km/h。建议在辅助泊车期间限制速度范围,并在车辆超过此限制时中止辅助泊车模式。速度限制的建议范围为。前进:10公里/小时;后退:12公里/小时。车辆应遵循避免与APS检测到的物体发生碰撞
APS类型1平行车位结束位置要求
针对以下子条例列出的2个标准场景,APS车辆在辅助泊车操纵完成时所达到的结束位置要求考虑D_f,D_r车辆的前轮和后轮到路缘的距离,以及和路边缘方向α(有路边缘的场景)或者D_f,D_r,和两泊车车辆连接线的方向α
——角度要求:
到道路边缘或车辆连接线的角度α应当在-3°到+3°之间,目标是0°
——与参考线的距离要求:
与道路边缘的距离D_r,D_f应当在0.05m到0.3m之间或与车辆连接线的距离D_r,D_f应当由车辆制造商定义并且依赖APS车辆实际的宽度
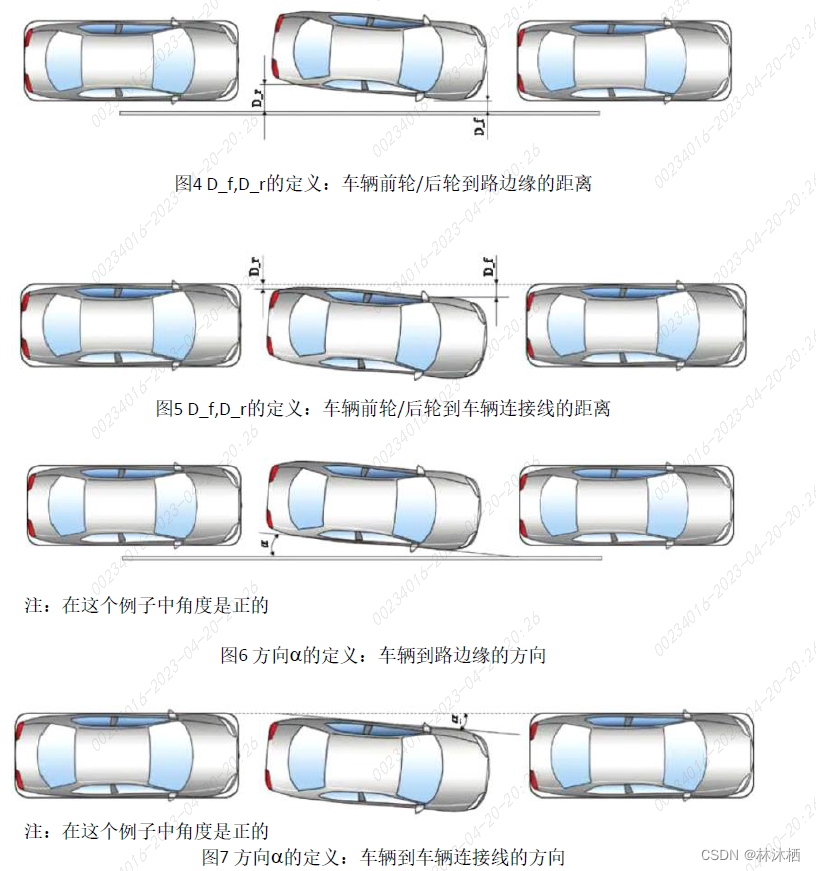
注:到路边缘或者连接线的目标距离D_f,D_r可能是APS内置参数依赖车辆制造商和当前场景。一个准确的值不会在本文挡中定义,但是一个可用的范围可以给出
APS类型1垂直车位结束位置要求
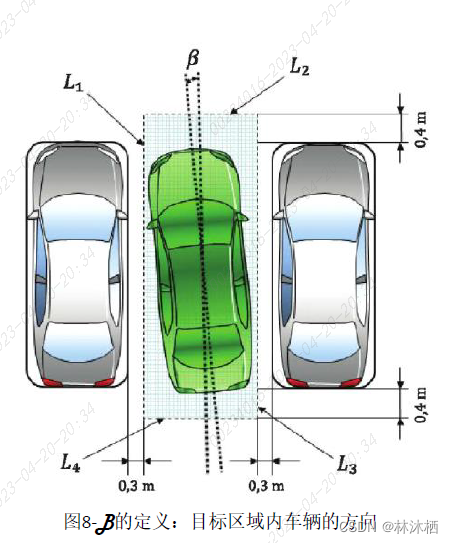
对于本子条款中描述的标准泊车场景,辅助泊车操纵结束时,APS车辆达到的终点位置要求由目标区域描述,目标区域由4条线限制。L1与左侧边界车辆的右侧侧面平行,距离为0.3 m,L3与右侧边界车辆的左侧侧面平行,间距为0.3 m。L2和L4平行于边缘车辆的前/后边缘,距离为0.4 m。由于系统不控制APS车辆的纵向移动,当系统指示辅助泊车模式已完成且达到目标区域时,驾驶员应停止车辆。在终点位置,无论侧视镜如何,投影在地面上的APS车辆轮廓应完全在目标区域内
——角度要求:
所有场景要求:角度B应当在-3°到+3°之间,目标是0°
性能要求测试
车位搜索测试
需要以一个规定的车速、一个与停放车辆的横向距离和的角度进行试验。应进行十次试验。必须至少检测九次停车位
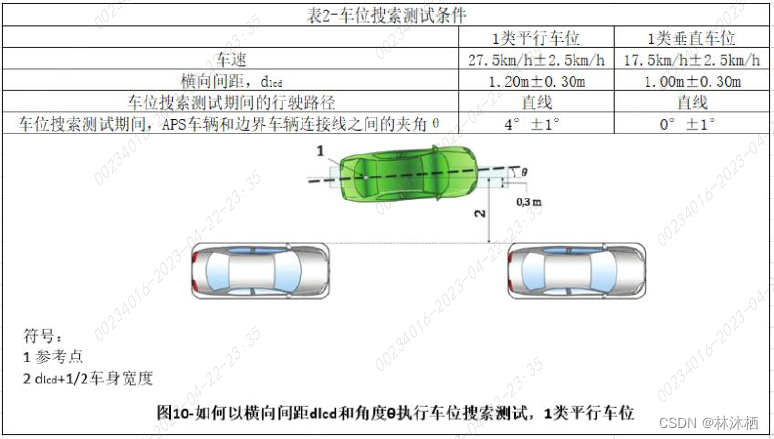
注:参考点为后轴的中间
辅助泊车期间的支持速度测试
在操纵开始到驶入停车位期间,最小速度峰值5.0km/h应当被应用
结束位置测试
为了测量APS车辆的结束位置,应当对同一停车位进行10次测试。在10次测试中,9次必须成功。成功的试验包括APS模式的完整序列(从车位搜索模式开始)
每次测试到达结束位置后,都需要测量距离D_f,D_r,和角度α。在有路边缘的场景下,前轮到道路边缘的距离D_f和后轮到道路边缘的距离D_r应当被测量
APS类型1平行车位
1.角度要求:
——APS车辆到道路边缘或车辆连接线的角度α应当在-3°到+3°之间
——α的标准偏差不得超过1.5
2.到参考线的距离要求
——到道路边缘的距离D_f,D_r应当在0.05到0.3m范围内或者到车辆连接线的距离D_f,D_r由制造商决定,车辆制造商可在此范围内选择目标距离
——D_f,D_r的标准偏差不得超过0.1m
APS类型1垂直车位
1.角度要求:
——角度B应当在-3°到+3°之间
——B的标准偏差不得超过1.5°
2. 到参考线的距离要求
——APS车辆应完全位于目标区域内
APS 类型II
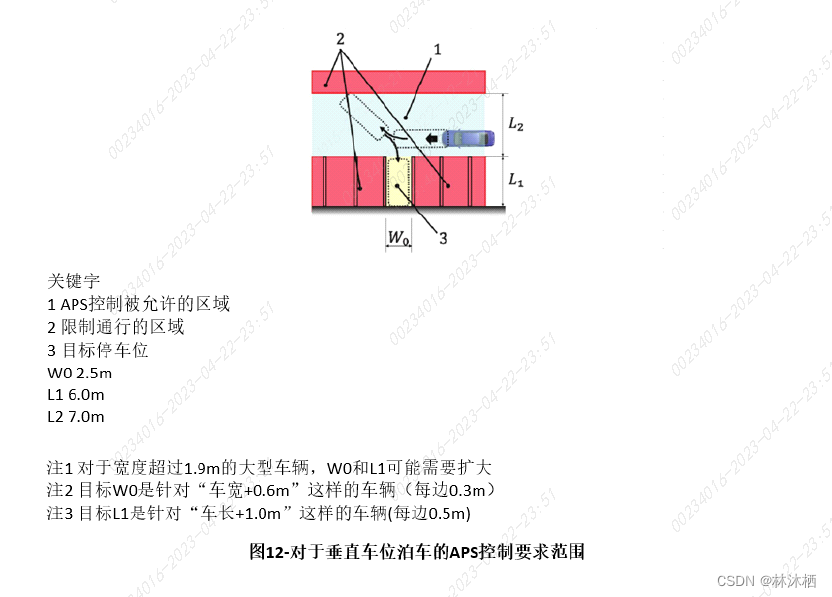
APS通过识别标记(如地面上的画线)来定位车辆可以停放的停车位,以确定目标停车位并计算引导路线,如图11所示:
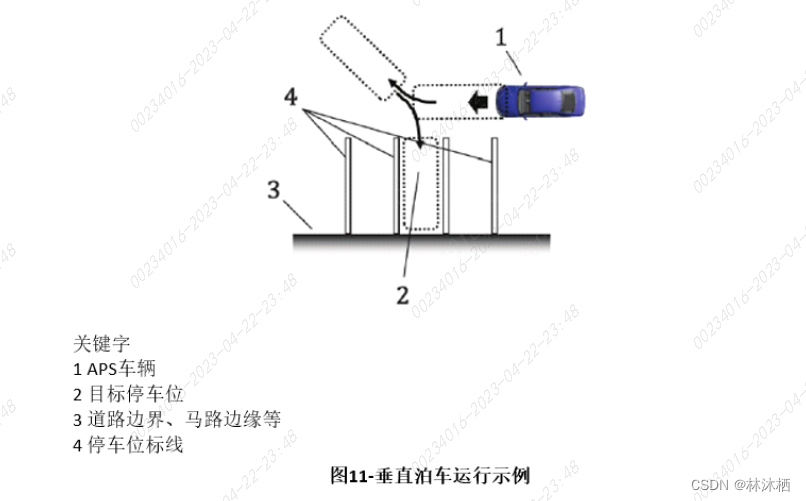
APS通过在泊车操纵过程中自动控制转向,将车辆引导至目标停车位。控制完成后,车辆在目标停车位的位置应达到一定的精度。本文件仅定义允许APS控制的区域,目标停车位以及限制通行的区域,没有通过感知或路线指引的寻址方法,并且限制泊车期间转弯时使用的来回次数(如三点转弯)
几何要求
1.在车辆控制期间,车辆不得进入限制通行区域
2.图12和13展示的环境条件的引导线,需要在系统设计时考虑进去。APS控制车辆被要求保持在图中APS控制允许的区域内。同时让用户知道系统如何辅助泊车操纵以及性能限制也是很重要的。系统如何工作的描述和周边目标物可能存在的干扰应该至少在用户手册中说明

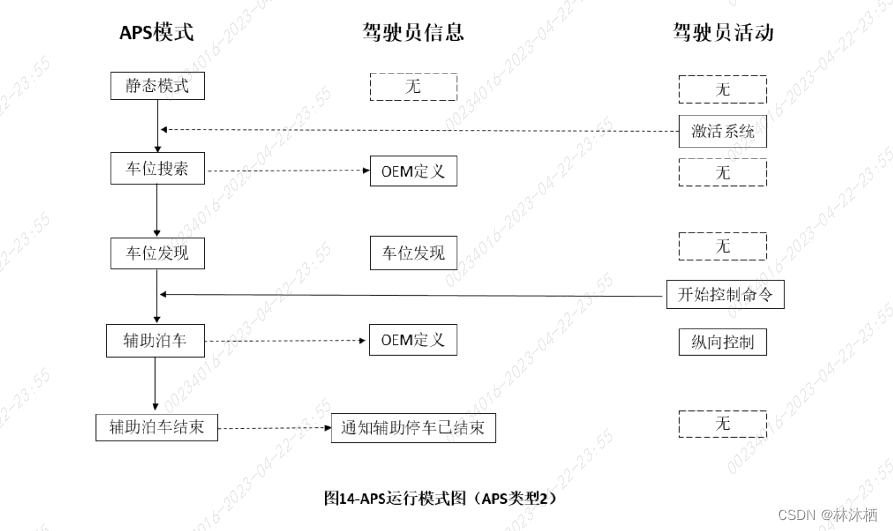
APS工作顺序
人机交互界面
1.在驾驶员把车辆开到APS控制可以启动的区域之后,驾驶员可以按照用户手册或者类似的进行系统启动
2.APS通过显示器等用户界面通知驾驶员目标停车位置
3.APS通过驾驶员的输入(如更改档位或按下命令开关)开始将车辆操纵至目标停车位
4.APS应在适当的时间向驾驶员提供必要的说明和警告
5.APS应通知驾驶员APS操作结束
最低性能要求
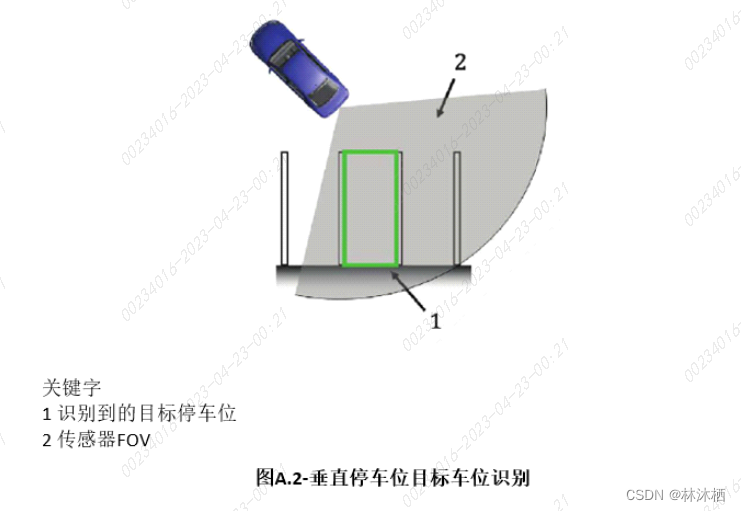
目标车位识别
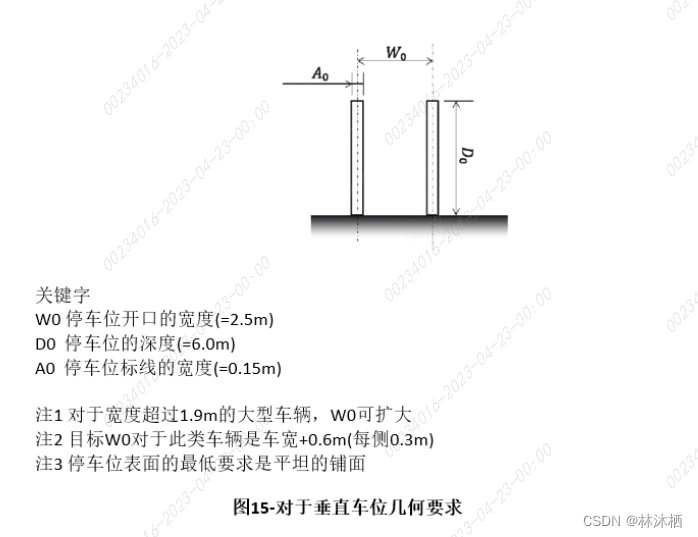
1.垂直车位:
2.平行车位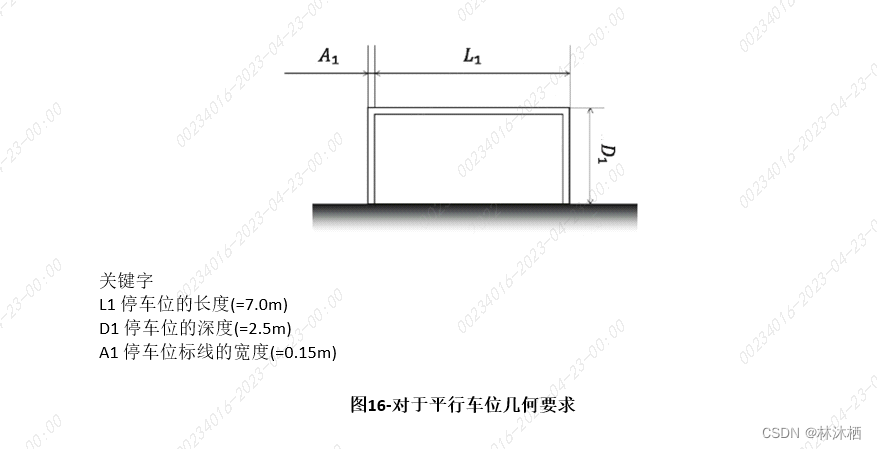
3.到达泊车辅助启动位置后,系统应识别目标停车位并将结果通知驾驶员
4.识别停车位的最低照明要求应为100 lux或更低(假设使用室内停车场)
5.识别所需的停车位线和路面之间的最小亮度对比度最好为5:1或更大;显示亮度对比度的定义见公式1:
速度要求
建议在辅助泊车期间限制速度范围,并在驾驶员超过此限制时为安全起见中止辅助泊车模式。速度限制的建议范围为(前进:10公里/小时;倒车:7公里/小时至12公里/小时)
结束位置要求
APS类型II垂直车位结束位置要求
1.位置要求:APS引导车辆到达目标停车位。当车辆完成泊车辅助时,车辆应停留在喷漆线定义的停车位内。
2.角度要求:系统性能定义为相对于停车位线的指示角θ和停车辅助停车完成时的“偏差”
APS类型II平行车位结束位置要求
1.角度及位置要求:
性能要求测试
车位搜索测试
1.停车位应位于平坦的统一路面(沥青或混凝土)上
2.目标停车位的照度应为100 lx或更高
3.绘制的线条与表面之间的亮度对比度应为5:1或更大
4.垂直车位:
5.平行车位:
终点位置测试
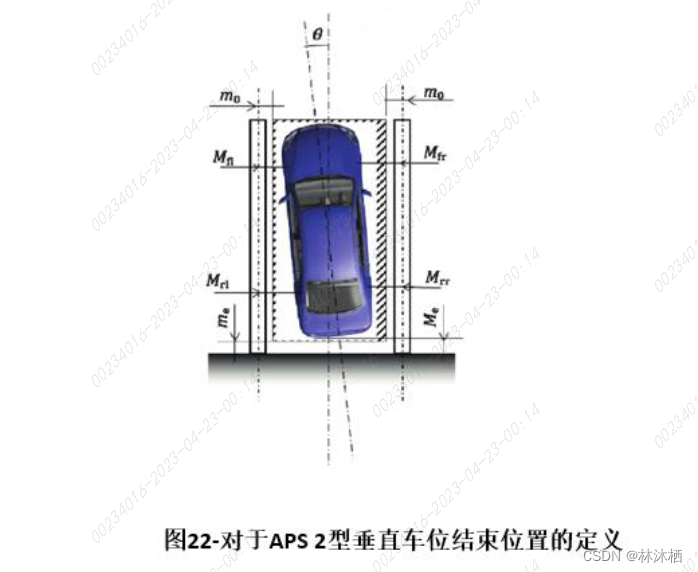
APS类型II垂直车位
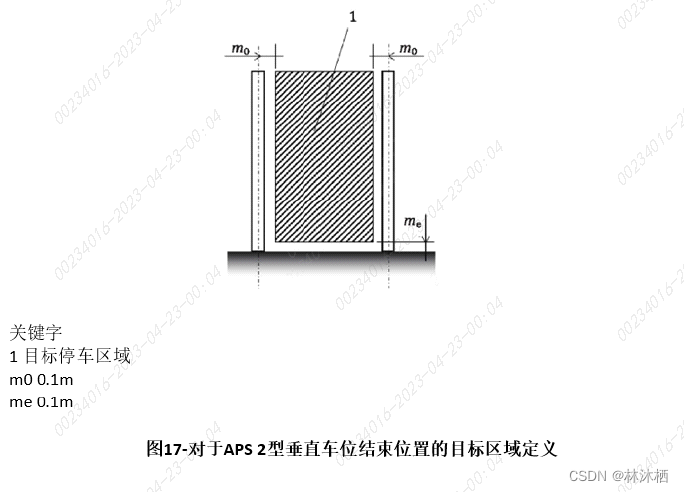
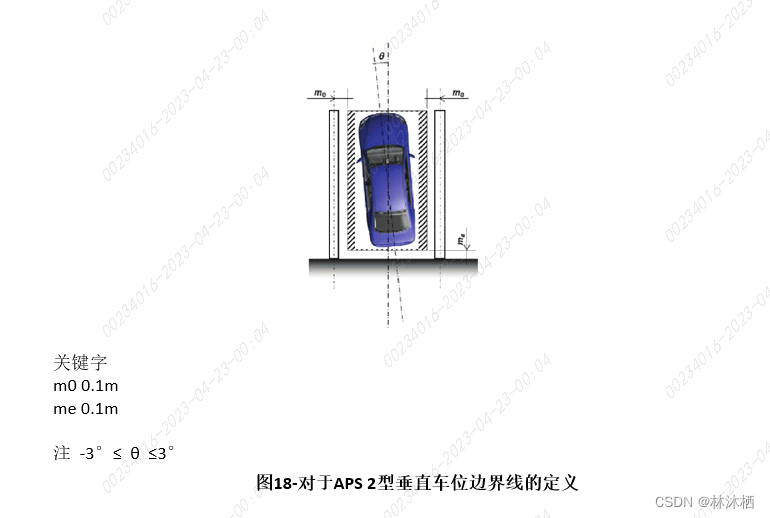
1.测量相对于停车标线中心线的角度θ,相对于停车位标线中心的横向边距Mfl,Mfr,Mrl,Mrr,相对于停车位最后方的纵向边距Me;
2.横向边缘的车辆参考点是最外侧轮胎与地面的接触点,而车身的最后部分是纵向边缘
3.标准:-3.0°≤θ≤3.0°,Mfl> mo, Mfr > mo, Mrl > mo, Mrr > mo (mo = 0.1 m), Me > me (me = 0.1 m)
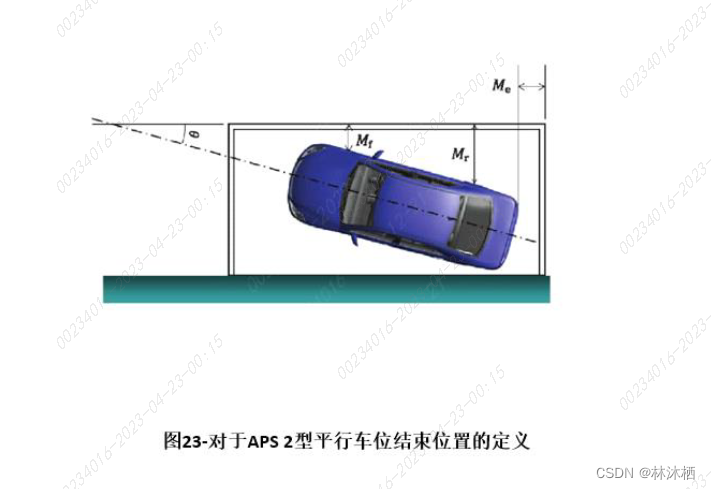
APS类型II平行车位
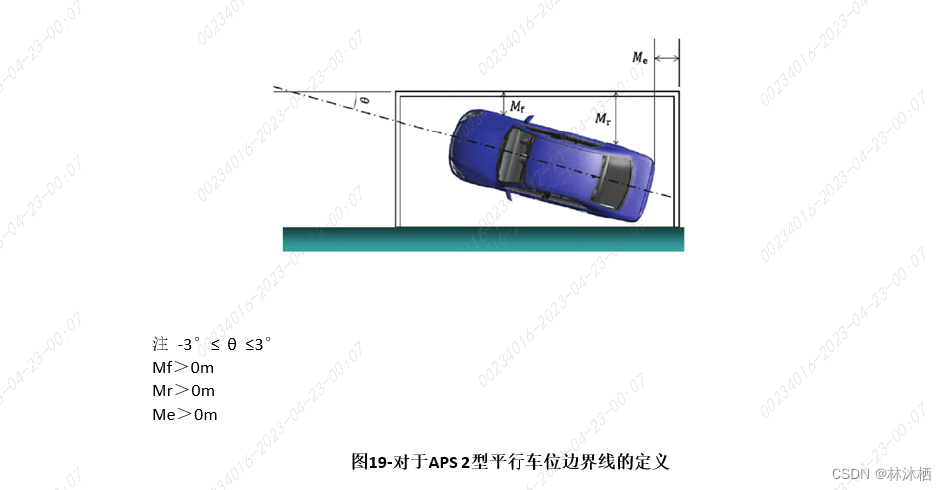
1.车辆应在停车位线内,不得停留在停车位线上。测量相对于停车位边线的角度θ,并测量与停车位边线相应直线的偏差Mf、Mr和Me
2.标准:-3.0°≤θ≤3.0°,Mf>0m,Mr>0m,Me>0m
APS工作顺序示例
车辆放置
驾驶员应手动将车辆移动到传感器可以捕捉到标记(如油漆线)定义的停车位的位置
打开主开关
1.主开关:系统应有一个主开关供驾驶员操作。驾驶员打开主开关后,应遵循选择泊车辅助模式后的顺序
2.当主开关关闭时,应取消所有控制
识别停车位
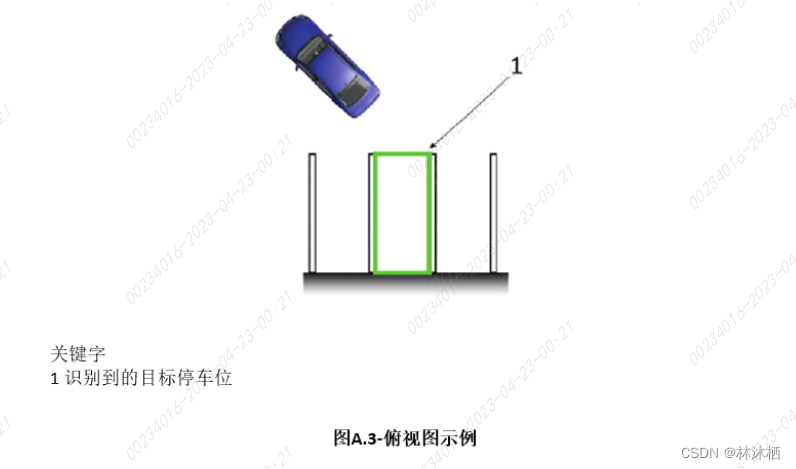
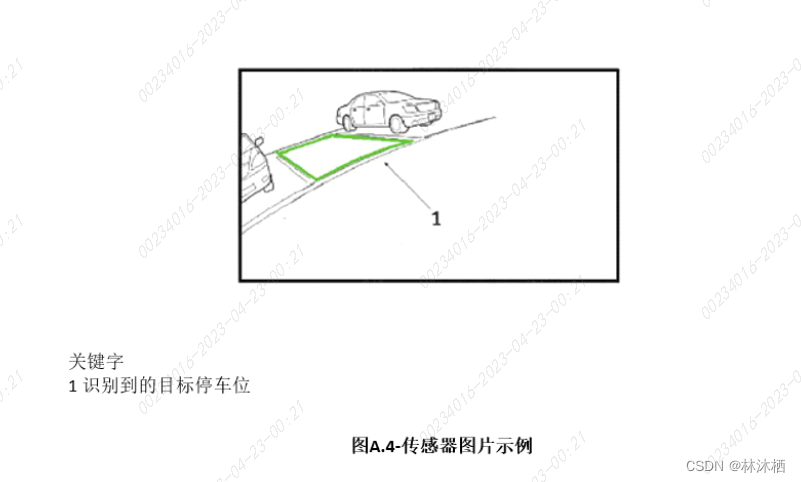
例如,APS从传感器图像中的槽线识别车辆可以停放的位置,并在同一传感器图像上覆盖网格(框)
重叠显示的方法,例如从车辆上方的俯视图或传感器图像的直接描绘,取决于制造商的设计,没有此类限制
驾驶员确认目标停车位
1.系统应能够通知驾驶员找到了合适的停车位
2.在车辆向系统检测到或驾驶员选择的目标停车位移动之前,驾驶员应能够确认控制开始
辅助泊车
1.当驾驶员决定将车停在找到的合适停车位并停车时。APS应在停车操纵过程中通过操纵转向来帮助驾驶员提供建议。
2.可以提前发出警告,以提醒驾驶员在方向盘通过自动控制开始转动之前要小心
3.系统支持泊车操纵的能力将取决于APS车辆相对于停车位的实际启动位置。允许启动位置的限制应在车辆的用户手册中描述
4.在车辆静止之前,不得启动转向
5.驾驶员应能够随时接管APS车辆的横向控制。在这种情况下。APS应立即终止转向的自动执行
辅助泊车结束
1.泊车操纵完成或中止时,应通知驾驶员