牛顿法、梯度下降法与拟牛顿法
- 0 引言
- 1 关于泰勒展开式
- 1.1 原理
- 1.2 例子
- 2 牛顿法
- 2.1 x 为一维
- 2.2 x 为多维
- 3 梯度下降法
- 4 拟牛顿法
- 4.1 拟牛顿条件
- 4.2 DFP 算法
- 4.3 BFGS 算法
- 4.4 L-BFGS 算法
0 引言
机器学习中在求解非线性优化问题时,常用的是梯度下降法和拟牛顿法,梯度下降法和拟牛顿法都是牛顿法的一种简化
牛顿法是在一个初始极小值点做二阶泰勒展开,然后对二阶泰勒展开式求极值点,通过迭代的方式逼近原函数极值点
在牛顿法迭代公式中,需要求二阶导数,而梯度下降法将二阶导数简化为一个固定正数方便求解
拟牛顿法也是在求解过程中做了一些简化,不用直接求二阶导数矩阵和它的逆
1 关于泰勒展开式
1.1 原理
如果我们有一个复杂函数
f
(
x
)
f(x)
f(x), 对这个复杂函数我们想使用 n 次多项式(多项式具有好计算,易求导,且好积分等一系列的优良性质)去拟合这个函数,这时就可以对
f
(
x
)
f(x)
f(x)进行泰勒展开,求某一点
x
0
x_0
x0附近的 n 次多项式:

注意:
n 次多项式只是在
x
0
x_0
x0 较小的邻域内能较好拟合
f
(
x
)
f(x)
f(x),也就是说,泰勒展开式其实是一种局部近似的方法,只近似
x
=
x
0
x=x_0
x=x0那一点的函数性
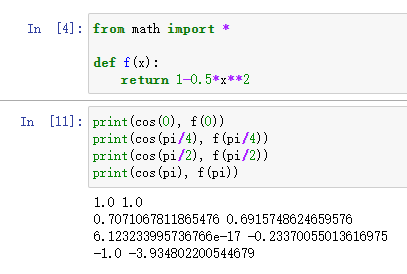
1.2 例子
现在要求 f ( x ) = c o s ( x ) f(x)=cos(x) f(x)=cos(x) 在 x 0 = 0 x_0=0 x0=0 处的二阶泰勒展开,因为我们去掉了高阶项,所以只是近似
直接套用公式
f
(
x
0
)
=
f
(
0
)
=
c
o
s
(
0
)
=
1
f(x_0)=f(0)=cos(0)=1
f(x0)=f(0)=cos(0)=1
f
′
(
x
0
)
=
f
′
(
0
)
=
−
s
i
n
(
0
)
=
0
f'(x_0)=f'(0)=-sin(0)=0
f′(x0)=f′(0)=−sin(0)=0
f
′
′
(
x
0
)
=
f
′
′
(
0
)
=
−
c
o
s
(
0
)
=
−
1
f''(x_0)=f''(0)=-cos(0)=-1
f′′(x0)=f′′(0)=−cos(0)=−1
所以展开后的公式为
f
(
x
)
≈
f
(
x
0
)
+
f
′
(
x
0
)
∗
x
+
f
′
′
(
x
0
)
∗
x
2
/
2
=
1
−
0.5
∗
x
2
f(x)≈f(x_0)+f'(x_0)*x+f''(x_0)*x^2/2=1-0.5*x^2
f(x)≈f(x0)+f′(x0)∗x+f′′(x0)∗x2/2=1−0.5∗x2
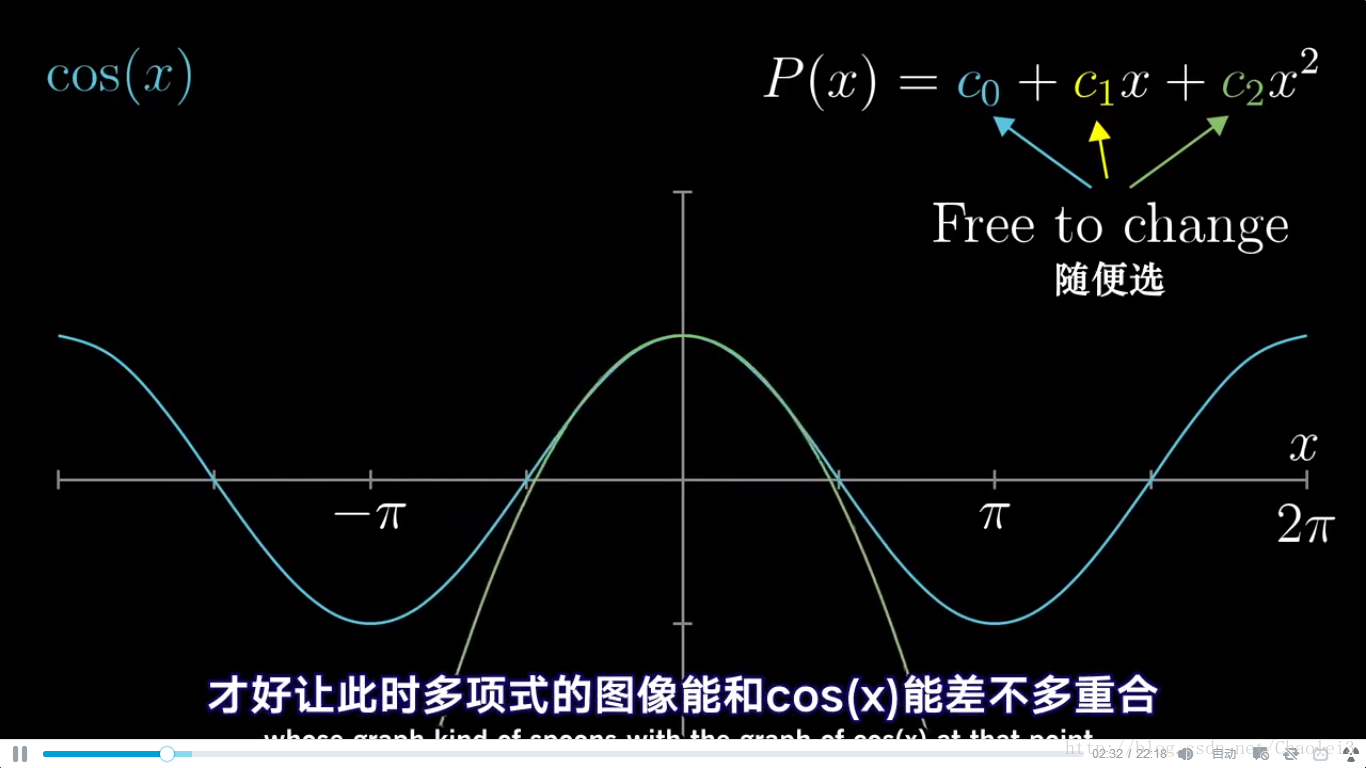
从下方运行程序可以看出,离展开点越近的点,拟合程度越高,越远的点,越离谱
2 牛顿法
2.1 x 为一维
现在假设我们有目标函数
f
(
x
)
f(x)
f(x),我们希望求此函数的极小值,牛顿法的基本思想是:随机找到一个点设为当前极值点
x
k
x_k
xk,在这个点对
f
(
x
)
f(x)
f(x) 做二次泰勒展开,进而找到极小点的下一个估计值。在
x
k
x_k
xk 附近的二阶泰勒展开为:

现在想求
φ
(
x
)
\varphi(x)
φ(x) 的极值点,由极值的必要条件可知,
φ
(
x
)
\varphi(x)
φ(x) 应满足导数为 0,即:
φ
′
(
x
)
=
0
\varphi'(x)=0
φ′(x)=0
即
φ
′
(
x
)
=
f
′
(
x
k
)
+
f
′
′
(
x
k
)
(
x
−
x
k
)
=
0
\varphi'(x)=f'(x_k)+f''(x_k)(x-x_k)=0
φ′(x)=f′(xk)+f′′(xk)(x−xk)=0
这样就可以求得 x 的值
x
=
x
k
−
f
′
(
x
k
)
f
′
′
(
x
k
)
x=x_k-\frac{f'(x_k)}{f''(x_k)}
x=xk−f′′(xk)f′(xk)
于是给定初始值
x
0
x_0
x0,就可以通过迭代的方式逼近
f
(
x
)
f(x)
f(x)的极值点:
x
k
+
1
=
x
k
−
f
′
(
x
k
)
f
′
′
(
x
k
)
x_{k+1}=x_k-\frac{f'(x_k)}{f''(x_k)}
xk+1=xk−f′′(xk)f′(xk)
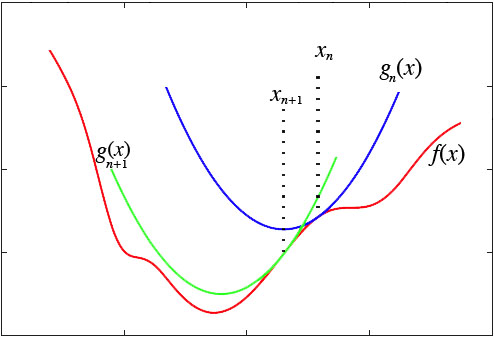
如下图,首先在 x n x_n xn 处泰勒展开,得到 f ( x ) f(x) f(x) 的近似函数 g n ( x ) g_n(x) gn(x) ,求得 g n ( x ) g_n(x) gn(x) 的极值点 x n + 1 x_{n+1} xn+1
随后在 x n + 1 x_{n+1} xn+1 出泰勒展开,得到 g n + 1 ( x ) g_{n+1}(x) gn+1(x) 函数,继续求 g n + 1 ( x ) g_{n+1}(x) gn+1(x) 的极值点
一直迭代最后就会逼近
f
(
x
)
f(x)
f(x) 的极值点
2.2 x 为多维
上面讨论的是参数 x 为一维的情况,当 x 有多维时,二阶泰勒展开式可以做推广,此时:
φ
(
x
)
=
f
(
x
k
)
+
∇
f
(
x
k
)
∗
(
x
−
x
k
)
+
1
2
∗
(
x
−
x
k
)
T
∗
∇
2
f
(
x
k
)
∗
(
x
−
x
k
)
\varphi(x)=f(x_k)+\nabla{f(x_k)}*(x-x_k)+ \frac{1}{2}*(x-x_k)^T*\nabla^2{f(x_k)}*(x-x_k)
φ(x)=f(xk)+∇f(xk)∗(x−xk)+21∗(x−xk)T∗∇2f(xk)∗(x−xk)
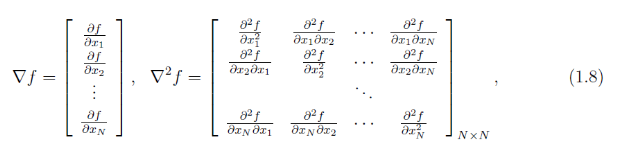
其中
∇
f
\nabla{f}
∇f为
f
f
f 的梯度向量,
∇
2
f
\nabla^2{f}
∇2f为
f
f
f的海森矩阵(Hessian matrix),其定义为:
φ
(
x
)
\varphi(x)
φ(x)对 x 向量求导并令其为 0 有:
∇
f
(
x
k
)
+
∇
2
f
(
x
k
)
∗
(
x
−
x
k
)
=
0
\nabla{f(x_k)}+\nabla^2{f(x_k)}*(x-x_k)=0
∇f(xk)+∇2f(xk)∗(x−xk)=0
于是有:
x
=
x
k
−
[
∇
2
f
(
x
k
)
]
−
1
∇
f
(
x
k
)
x=x_k-[\nabla^2{f(x_k)}]^{-1}\nabla{f(x_k)}
x=xk−[∇2f(xk)]−1∇f(xk)
通过迭代的方式能找到函数的极值点
牛顿法缺点:
- 函数必须具有一二阶偏导数,海森矩阵必须正定
- 计算相当复杂,除梯度外还需要计算二阶偏导数和逆矩阵
3 梯度下降法
在一维牛顿法中,迭代公式为:
x
k
+
1
=
x
k
−
f
′
(
x
k
)
f
′
′
(
x
k
)
x_{k+1}=x_k-\frac{f'(x_k)}{f''(x_k)}
xk+1=xk−f′′(xk)f′(xk)
这个公式缺点:
- 需要求二阶导数,有些函数求二阶导数之后就相当复杂了;
- 因为 f ′ ′ ( x n ) f''(x_n) f′′(xn)的大小不定,所以 g ( x ) g(x) g(x)开口方向不定,我们无法确定最后得到的结果究竟是极大值还是极小值
为了解决这两个问题,我们放弃二阶精度,即去掉
f
′
′
(
x
n
)
f''(x_n)
f′′(xn),改为一个固定的正数1/h:
φ
(
x
)
=
f
(
x
k
)
+
f
′
(
x
k
)
(
x
−
x
k
)
+
1
2
h
(
x
−
x
k
)
2
\varphi(x)=f(x_k)+f'(x_k)(x-x_k)+\frac{1}{2h}(x-x_k)^2
φ(x)=f(xk)+f′(xk)(x−xk)+2h1(x−xk)2
该抛物线是一条开口向上的抛物线,通过求它的极值可以保证得到的是极小值。
φ
(
x
)
\varphi(x)
φ(x) 的极小值点为
x
k
−
h
f
′
(
x
k
)
x_k-hf'(x_k)
xk−hf′(xk)
迭代公式为
x
k
+
1
=
x
k
−
h
f
′
(
x
k
)
x_{k+1} = x_k-hf'(x_k)
xk+1=xk−hf′(xk)
对于高维空间就是
x
k
+
1
=
x
k
−
h
∇
(
x
k
)
x_{k+1} = x_k-h\nabla(x_k)
xk+1=xk−h∇(xk)
4 拟牛顿法
拟牛顿法的基本思想是:不用二阶偏导数而构造出可以近似海森矩阵的正定对称阵,在“拟牛顿”的条件下优化目标函数。不同的构造方法就产生了不同的拟牛顿法。
一些记号:
∇
f
\nabla{f}
∇f 记为 g 表示梯度,
g
k
g_k
gk表示
∇
f
(
x
k
)
\nabla{f(x_k)}
∇f(xk)
∇ 2 f \nabla^2{f} ∇2f 海森矩阵,记为 H, K k K_k Kk表示 ∇ 2 f ( x k ) \nabla^2{f(x_k)} ∇2f(xk)
用 B 表示对海森矩阵 H 本身的近似,D表示对海森矩阵的逆 H − 1 H^{-1} H−1的近似, 即 B ≈ H , D ≈ H − 1 B≈H, D≈H^{-1} B≈H,D≈H−1
4.1 拟牛顿条件
在经过 k+1 次迭代后得到
x
k
+
1
x_{k+1}
xk+1,此时目标函数
f
(
x
)
f(x)
f(x)在
x
k
+
1
x_{k+1}
xk+1处作泰勒二阶展开,得到:
f
(
x
)
≈
f
(
x
k
+
1
)
+
∇
f
(
x
k
+
1
)
∗
(
x
−
x
k
+
1
)
+
1
2
∗
(
x
−
x
k
+
1
)
T
∗
∇
2
f
(
x
k
+
1
)
∗
(
x
−
x
k
+
1
)
f(x)≈f(x_{k+1})+\nabla{f(x_{k+1})}*(x-x_{k+1})+ \frac{1}{2}*(x-x_{k+1})^T*\nabla^2{f(x_{k+1})}*(x-x_{k+1})
f(x)≈f(xk+1)+∇f(xk+1)∗(x−xk+1)+21∗(x−xk+1)T∗∇2f(xk+1)∗(x−xk+1)
两边对 x 求梯度有:
∇
f
(
x
)
≈
∇
f
(
x
k
+
1
)
+
H
k
+
1
∗
(
x
−
x
k
+
1
)
(1)
\nabla{f(x)} ≈ \nabla{f(x_{k+1})}+H_{k+1}*(x-x_{k+1}) \tag{1}
∇f(x)≈∇f(xk+1)+Hk+1∗(x−xk+1)(1)
在式(1)中取
x
=
x
k
x=x_k
x=xk ,整理可得:
g
k
+
1
−
g
k
≈
H
k
+
1
∗
(
x
k
+
1
−
x
k
)
(2)
g_{k+1}-g_{k}≈H_{k+1}*(x_{k+1}-x_k)\tag{2}
gk+1−gk≈Hk+1∗(xk+1−xk)(2)
引入记号:
s
k
=
x
k
+
1
−
x
k
,
y
k
=
g
k
+
1
−
g
k
s_k=x_{k+1}-x_k,y_k=g_{k+1}-g_{k}
sk=xk+1−xk,yk=gk+1−gk
式 (2) 可以写为:
y
k
≈
H
k
+
1
∗
s
k
=
>
简记为:
y
k
≈
B
k
+
1
∗
s
k
y_k≈H_{k+1}*s_k =>简记为:y_k≈B_{k+1}*s_k
yk≈Hk+1∗sk=>简记为:yk≈Bk+1∗sk
或者
s
k
≈
H
k
+
1
−
1
∗
g
k
=
>
简记为:
s
k
≈
D
k
+
1
∗
y
k
s_k≈H^{-1}_{k+1}*g_k=>简记为:s_k≈D_{k+1}*y_k
sk≈Hk+1−1∗gk=>简记为:sk≈Dk+1∗yk
这就是所谓的拟牛顿条件,它对迭代过程中的海森矩阵做约束。
4.2 DFP 算法
参考:牛顿法与拟牛顿法学习笔记(三)DFP 算法
4.3 BFGS 算法
参考:牛顿法与拟牛顿法学习笔记(四)BFGS 算法
4.4 L-BFGS 算法
牛顿法与拟牛顿法学习笔记(五)L-BFGS 算法
参考:
泰勒展开式的理解
牛顿法与拟牛顿法学习笔记(一)牛顿法
梯度下降和EM算法:系出同源,一脉相承
Markdown公式、特殊字符、上下标、求和/积分、分式/根式、字体