离散卡尔曼滤波基本理论
卡尔曼预报器、平滑器可以参考之前的博客:(2条消息) 卡尔曼滤波器_KPer_Yang的博客-CSDN博客
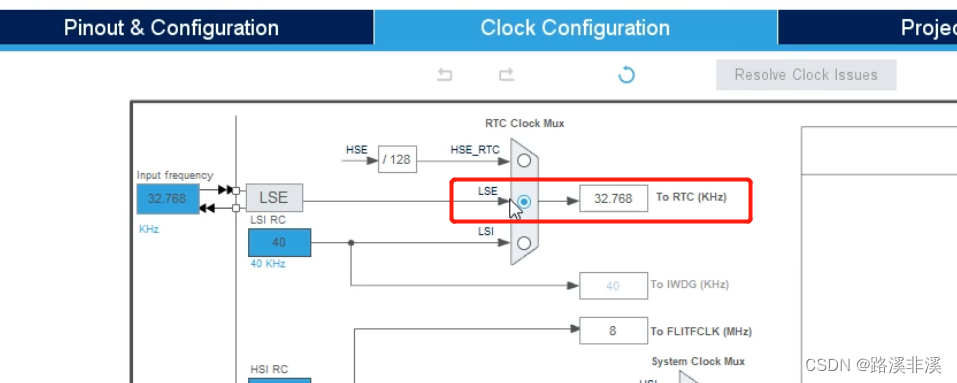
下面贴上一张图1,很直观:分成时间更新和测量更新两步,其中的 K K K和 P P P有可能随着时间推移变成常数,但是多数情况是变化的,如果是常数,可以离线计算在线使用,可以减少很多在线计算量。 K K K代表着观测值和状态空间计算值的不同比重,得到一个估计值作为输出。初始化观测噪声协方差矩阵 R R R可以使用离线数据。初始化过程噪声矩阵 Q Q Q比较困难。可以使用另一个卡尔曼滤波器离线进行估计,再实际使用。
陀螺仪的卡尔曼滤波参数初始化可以参考这种(其中q和r参数尤为重要,一般得通过实验测试得到):2
- init_x:待测量的初始值,如有中值一般设成中值
- init_p:后验状态估计值误差的方差的初始值
- q:预测(过程)噪声方差
- r:测量(观测)噪声方差。以陀螺仪为例,测试方法是:保持陀螺仪不动,统计一段时间内的陀螺仪输出数据。数据会近似正态分布,按3σ原则,取正态分布的(3σ)^2作为r的初始化值。

numpy实现
import numpy as np
class DiscreteSystem:
"""
离散系统
"""
def __int__(self,
A: np.array, B: np.array, Q: np.array,
H: np.array, R: np.array, X: np.array,
Z: np.array, U: np.array):
self.A = A # 状态转移矩阵 nxn
self.B = B # 输入矩阵 nxl,只有加入控制量才有用到,一般滤波没有用到
self.Q = Q # 过程噪声 p(w)~N(0, Q),Q难估算,离散数据需要另一个卡尔曼滤波进行估算
self.H = H # 观测矩阵 mxn
self.R = R # 测量噪声 p(v)~N(0, R),R可以通过离线数据计算
self.X = X # 状态变量 nx1
self.Z = Z # 观测值 mx1
self.U = U # 控制量 lx1
class Kalman_Filter:
"""
卡尔曼滤波
"""
def __init__(self, discrete_system: DiscreteSystem, estimation_init: np.array, P_init: np.array):
"""
初始化
:param discrete_system: 离散系统
:param estimation_init: 估计值初始化
:param P_init: P初始化
"""
self.discrete_system = discrete_system
self.estimation = estimation_init
self.P = P_init # P会趋向于稳定
def forward(self, Z: np.array) -> np.array:
"""
一步卡尔曼滤波
:param Z:观测值
:return:估计值
"""
self.estimation = Z
self.discrete_system.Z = Z
X_right_top_hat_ = self.discrete_system.A @ self.estimation + self.discrete_system.B @ self.discrete_system.U
P_right_top_ = self.discrete_system.A @ self.P @ np.transpose(self.discrete_system.A) + self.discrete_system.Q
# 计算增益
K = P_right_top_ @ np.transpose(self.discrete_system.H) \
@ np.linalg.inv(self.discrete_system.H @ P_right_top_ @ np.transpose(self.discrete_system.H) + self.discrete_system.R)
self.estimation = X_right_top_hat_ + K @ (Z - self.discrete_system.H @ X_right_top_hat_)
# 计算误差协方差矩阵,会随着不断迭代趋于稳定
self.P = P_right_top_ - K @ self.discrete_system.H @ P_right_top_
return self.estimation
if __name__ == '__main__':
# 1、初始化离散系统DiscreteSystem
# 2、初始化卡尔曼滤波 Kalman_Filter
# 3、使用观测值循环调用 卡尔曼滤波step
...
参考:
An Introduction to the Kalman Filter ↩︎
Kalman滤波器从原理到实现 - 莫水千流 - 博客园 (cnblogs.com) ↩︎