目录
一. 综合健康管理系统架构
1. 系统架构:
2. 故障诊断算法:
3. 预测维护策略:
4. 安全与隐私:
5. 用户友好性:
6. 模块化与可扩展性:
7. 与其他系统集成:
8. 考虑环境因素:
9. 持续优化与升级:
二、 FMECA
三、 IVHM 系统分析
四、 综合健康管理系统架构
一. 综合健康管理系统架构
为确保无人机(UAV)航行安全,降低维修保障费用,推行高效的维修保障模式,开展综合健康管理(IVHM)系统分析。根据某型功能结构,对若干关键设备和结构本体展开故障模式、影响及危害度分析 (FMECA); 基于运维需要,分析 IVHM 系统的功能需求,以设计其系统框架,并 提出设计该系统所需的关键技术; 采用基于智能体仿真模型评估主题任务的成功性,分析保障资源需求。
将设备故障参数和功能性参数作为输入,建立了基于智能体的 IVHM 系统模型,为UAV空中机器人的任务成功性评估和保障资源需求分析提供了推理依据。
设计空中机械臂机器人健康管理系统需要考虑以下几个关键方面:
1. 系统架构:
- a. 传感器模块:用于收集机器人的实时数据,如温度、振动、关节角度、扭矩等。
- b. 数据预处理模块:将收集到的原始数据进行清洗、筛选和转换,以便后续分析。
- c. 特征提取模块:从预处理后的数据中提取有用的特征,如频域特征、时域特征等。
- d. 健康评估模块:基于特征数据,采用机器学习或深度学习算法,对机器人的健康状况进行评估。
- e. 预测与诊断模块:根据健康评估结果,预测可能出现的故障和维修需求,为运维人员提供有效建议。
- f. 可视化与报告模块:将评估结果以图表、报告等形式展示,帮助运维人员了解机器人的健康状况。
- g. 通信模块:实现机器人与远程监控系统的数据传输与交互。
2. 故障诊断算法:
选择合适的故障诊断算法对于健康管理系统至关重要。这里有一些建议:
- a. 机器学习算法:如支持向量机(SVM)、决策树、随机森林、K-近邻算法等。根据提取的特征数据,训练模型来识别和分类不同的故障类型。
- b. 深度学习算法:如卷积神经网络(CNN)、循环神经网络(RNN)、长短时记忆网络(LSTM)等。这些算法可以自动提取特征,并在大量数据下表现良好。
- c. 无监督学习算法:如主成分分析(PCA)、独立成分分析(ICA)和聚类分析等。这些算法适用于无标签数据,可以发现潜在的数据模式和异常。
- d. 数据驱动的方法:如模型自适应、在线学习和迁移学习等。这些方法可以使系统适应不断变化的工作环境和设备状态。
3. 预测维护策略:
- a. 基于数据的预测维护:通过分析历史故障数据,预测未来可能出现的故障和维修需求。
- b. 基于模型的预测维护:建立设备寿命模型,根据设备的实时工况数据预测其剩余寿命。
- c. 基于经验的预测维护:结合运维人员的经验和专业知识,对设备的维护需求进行预测。
4. 安全与隐私:
- a. 数据加密:对传输和存储的数据进行加密,以防止数据泄露和篡改。
- b. 访问控制:为不同级别的用户设置不同的访问权限,确保数据的安全使用。
- c. 系统备份:定期备份系统数据和配置信息,以便在发生故障时进行恢复。
5. 用户友好性:
- a. 界面设计:设计直观易用的界面,方便运维人员查看设备状态和报告。
- b. 报警机制:设定合理的报警阈值,实时提醒运维人员关注设备的健康状况。
- c. 故障处理指南:提供详细的故障处理指南,帮助运维人员快速定位和解决问题。
- 通过以上几个方面的设计和优化,可以构建出一个高效、可靠的空中机械臂机器人健康管理系统,以降低运维成本、提高设备寿命和保障安全生产。
6. 模块化与可扩展性:
- a. 模块化设计:将系统各个功能独立设计为模块,使得系统易于维护和升级。
- b. 可扩展性:设计具有灵活性的系统架构,便于添加新的功能和适应不同类型的空中机械臂机器人。
7. 与其他系统集成:
- a. 标准化接口:遵循相关行业标准,设计通用接口,以便与其他监控系统、数据平台等进行集成。
- b. 数据共享:与其他管理系统(如生产管理系统、质量管理系统等)共享数据,实现协同监控和维护。
8. 考虑环境因素:
- a. 抗干扰设计:针对空中机械臂机器人可能面临的环境干扰,如温度、湿度、电磁干扰等,进行相应的抗干扰设计。
- b. 节能环保:采用节能设计,降低系统能耗,同时关注设备在使用过程中产生的环境影响。
9. 持续优化与升级:
- a. 数据分析与优化:通过对系统运行数据的持续分析,发现并解决潜在问题,优化系统性能。
- b. 软件升级:定期更新系统软件,修复已知问题,提供新功能和性能改进。
通过以上设计原则和关注点,我们可以构建一个高效、可靠、易用的空中机械臂机器人健康管理系统。这将有助于及时发现和解决设备问题,降低运维成本,提高设备寿命,保障安全生产,同时为企业提供更高的经济效益。
二、 FMECA
机器人健康管理系统(Robot Health Management System, RHMS)是一种 关键技术,旨在确保机器人在其整个生命周期中保持高可靠性和安全性。RHMS涉及到对机器人的状态进行实时监测、诊断和预测,并采取相应措施以防止故障发生。这样可以提高系统性能,减少停机时间,降低维护成本,并确保安全运行。
FMECA(Failure Modes, Effects, and Criticality Analysis)是一种系统评估方法,用于识别系统中可能发生的故障模式,分析其影响和严重性,并确定关键性。FMECA的主要目的是识别潜在故障,评估其对系统性能的影响,以便在设计、开发和维护过程中采取相应的措施,提高系统的可靠性和安全性。
将RHMS与FMECA相结合,可以在机器人开发过程中更好地识别潜在故障,并制定有效的健康管理策略。具体而言,可以通过以下几个方面实现:
-
需求分析和规划:在项目早期阶段,通过对用户需求和系统性能进行分析,识别关键性能指标和潜在故障源,为后续健康管理策略的制定提供基础。
-
设计阶段:在设计阶段,通过应用FMECA方法,分析不同的故障模式及其影响,确定关键组件和子系统。这有助于在设计过程中提前采取相应的措施,如选择高可靠性的硬件、设计冗余和容错机制等。
-
开发和调试阶段:在开发过程中,根据故障模式和健康管理需求,设计相应的传感器、诊断算法和控制策略。同时,对系统进行集成测试,验证其功能、性能和可靠性。
-
验证和优化阶段:通过对实际运行数据的收集和分析,评估系统的可靠性和健康状况。基于FMECA的结果,持续优化健康管理策略,如故障诊断、预测维护和控制策略调整等。
-
迭代和升级阶段:在系统升级过程中,关注行业发展趋势和技术创新,以便将最新技术应用到机器人健康管理系统中。根据实际运行情况和用户反馈,优化和升级系统,以提高整体性能和可靠性。
总之,机器人健康管理系统和FMECA相结合,为机器人系统的设计、开发和维护提供了一个全面的方法。通过识别和分析潜在的故障模式,我们可以更好地理解系统的风险和挑战,并在整个生命周期内制定有效的健康管理策略。这样,我们不仅能够提高系统的可靠性和安全性,还能降低维护成本,延长设备使用寿命,为用户创造更大的价值。
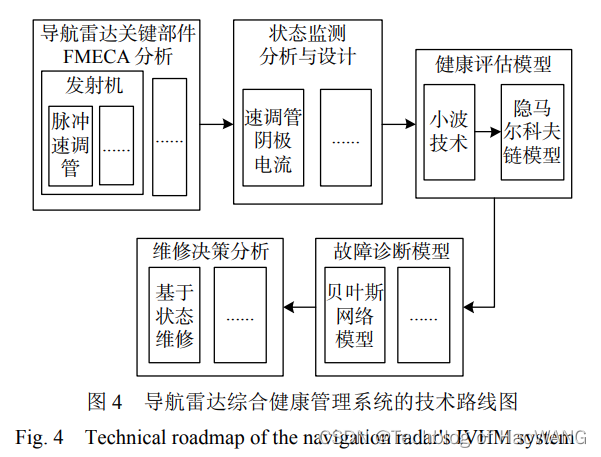
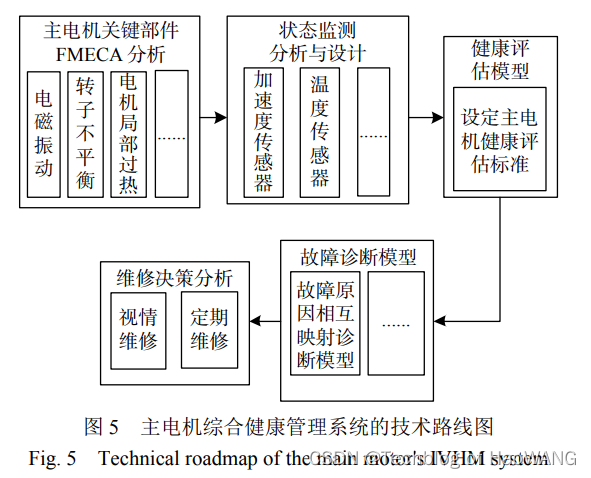
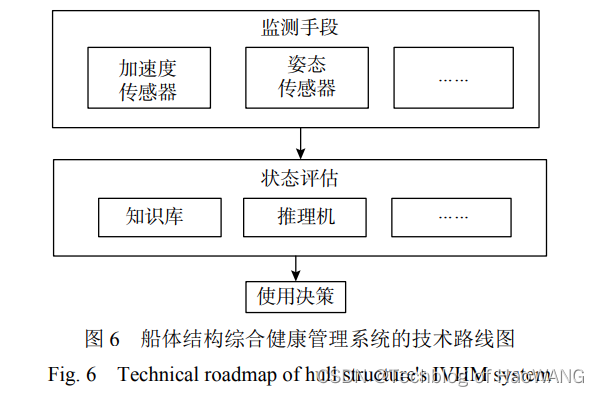
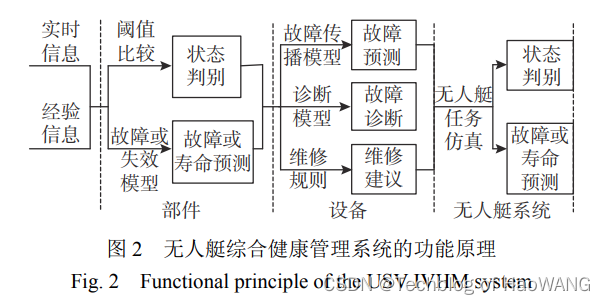
为了能够对无人艇的关键设备或部分设备进 行有效的状态检测与故障预测,实时评估无人艇 的能力,首先,应根据无人艇的关键设备或部分 设备的健康管理需求,合理设置设备的检测手 段,通过对比部件的状态参数与设备健康等级阈 值,判别部件的健康状态,并根据部件故障或失 效模型,预测部件的故障或寿命;接着,通过所建 立设备的故障传播模型和故障诊断模型,对设备 进行故障预测及故障诊断;然后,通过故障−维修 规则库、预防性维修规则,自动生成维修建议及 需求清单;最后,利用设备的健康状态参数,通过 建立无人艇仿真模型,实时评估无人艇剩余任务 能力。
从主要设备的关键部件到整个无人艇系统, 采用 FMECA 分析方法进行分析,具体内容包括: 部件或设备的故障模式、局部影响、最终影响和 危害度。
参考 :
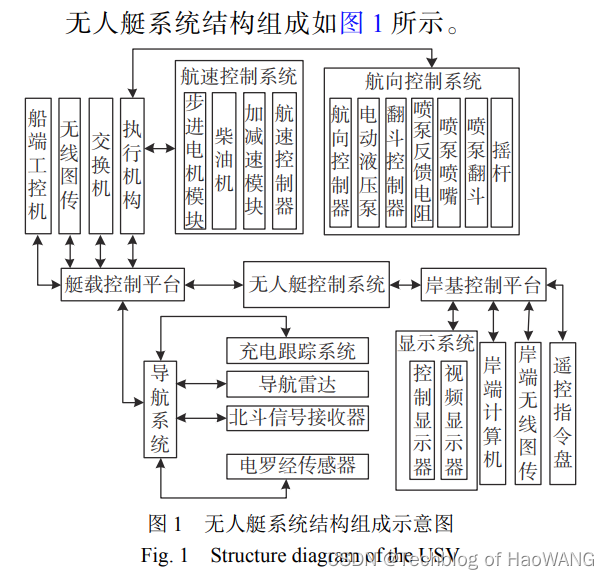
某型无人艇综合健康管理系统分析
三、 IVHM 系统分析
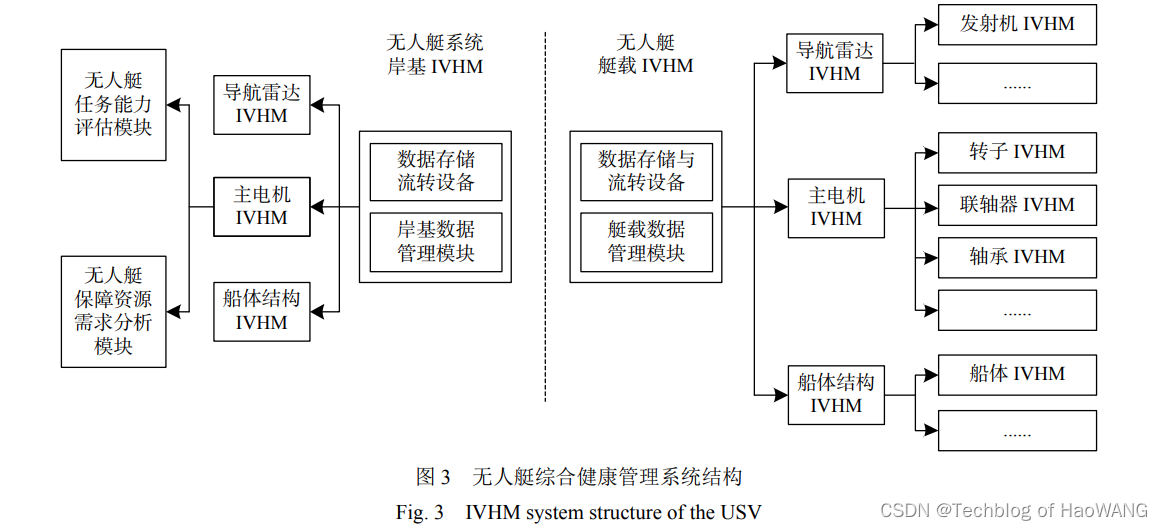
无人艇是由各类电子设备、机电设备、机械 结构组成的弱耦合系统,各设备或部件之间的功 能与故障独立性较强,为确保无人艇 IVHM 系统 的执行效率,该系统应采用分布式架构。根据无 人艇系统的构成,将 IVHM 系统设计为 3 层,其中 底层为各关键设备的部件层,中间层为设备层, 顶层为无人艇的系统层。根据无人艇的使用特 点,部件层 IVHM 系统应部署在艇上,构成艇载 IVHM 系统;设备层与系统层 IVHM 系统应部署在岸上,构成岸基 IVHM 系统。
艇载 IVHM 系统 与岸基 IVHM 系统之间通过数据流程设备进行数 据通信,共同构成完整的无人艇 IVHM 系统。 部件层 IVHM 系统在已有机内测试(BIT)的 基础上,根据环境监测以及无人艇及设备对部件 状态监测的需要,合理加装监测点,通过各类传 感器采集部件及环境监测的参数信息,满足部件 状态监测、健康评估、故障诊断或寿命预测等功 能需求;部件状态信息上传至设备,为设备的故 障预测、故障诊断及健康评估提供输入。
设备层 IVHM 系统汇总所属部件提供的状态 与故障信息,利用故障传播模型及部件故障预测 模型,进行设备级的故障预测;利用案例信息和 经验信息,在部件故障信息的支持下,应用故障 诊断模型,通过人机交互实施设备级的故障诊断; 监测或计算设备性能参数,根据设备健康等级设 定,对设备健康予以评估;结合状态−维修规则、故障− 维修决策规则以及预防性维修规则,生成设备维 修建议。设备健康及故障相关信息上传至无人艇 系统,为无人艇剩余任务能力仿真评估提供输入。
无人艇 IVHM 系统的系统层汇总了各设备提 供的设备状态与故障信息,根据无人艇的后续任 务规划,应用任务仿真模型实时评估无人艇的剩 余任务能力,并预测剩余任务中可能出现的重点 故障,并预估出维修需求及保障资源需求。
综合无人艇的结构组成及 IVHM 系统划分与 部署分配,无人艇 IVHM 系统结构如图 3 所示。
四、 综合健康管理系统架构