前端流程(scanRegistration.cpp)
多线激光雷达即有多个激光发射器同时工作,如常见的 Velodyne16,就是共有 16 个激光发射器,一般这些发射器竖排排列,然后一起水平旋转。
激光雷达在一定的时间内旋转一圈,即一帧的点云数据。值得注意的是,在一帧时间内激光雷达的载体也会运动,因此,一帧数据内会包括不同时间的点云,这也就是激光雷达的运动畸变。
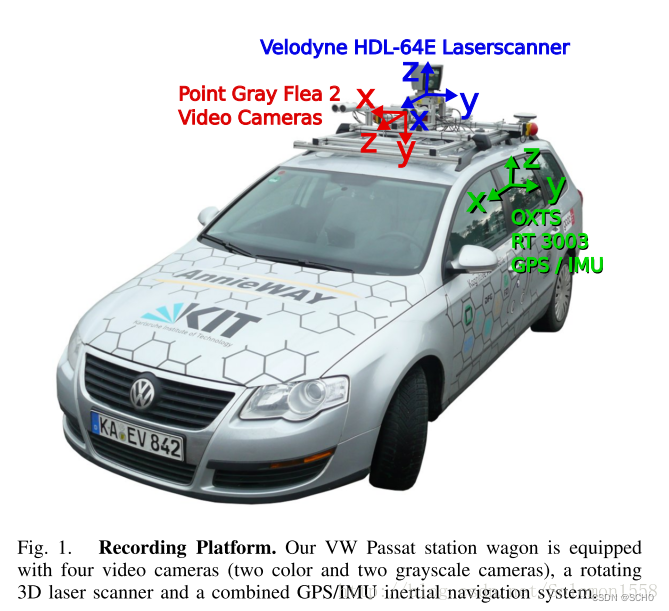
下图是kitti数据集的坐标系表示
1.scanRegistration.cpp
main函数:
- 建立scanRegistration节点
- 设置雷达线束(64),最小范围(5m)
- 订阅雷达原始点云信息,发布的信息包括有效点云、大曲率角点、稍微大曲率角点、小曲率面点,稍微小曲率面点,主要处理过程在原始点云信息的回调函数
laserCloudHandler回调函数
- ros格式转pcl点云,移除空点及车体范围内的点
- 角度补偿, 计算起始角度和结束角度,确保相差2 PAI
- 遍历点云,根据俯仰角计算对应的扫描线,根据水平角计算当前角度距离起始角度的差值,根据差值计算时间戳,用于后面进行运动补偿,将点云存储进对应的扫描线。这里注意intensity属性整数部分存储的是扫描线的索引,小数部分是相对于起始时刻的时间
- 提取特征并均匀化。首先计算所有点云曲率,将每个扫描线分为6等分,将角点曲率从小到大排序,每段取最大的两个作为大曲率角点,次大的20个作为稍微大曲率的角点,取曲率最小的4个作为面点,对面点进行下采样滤波
- 发布点云信息,包括包括有效点云、大曲率角点、稍微大曲率角点、小曲率面点,稍微小曲率面点
2.异常点筛选
这一步其实是需要放在特征提取之前做的
但是这块A-loam中没有,借助lio-sam中featureExtraction.cpp讲解
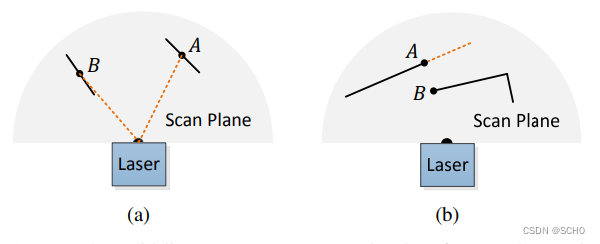
首先遍历所有点云,取出相邻两点的距离信息,计算两个点的列数id差。由于在筛选时会去除空点,因此防止两个有效点云虽然相邻但是间隔很远。
根据深度信息筛选下图中b的情况,根据相邻点的距离差,筛选下图中a的情况。
3.激光运动畸变及补偿
激光雷达的一帧数据是过去一段时间而非某个时刻的数据,在这一帧时
间内的激光雷达或者其载体通常会发生运动,因此,这一帧数据的原点都不一致,运动补偿的目的就是把所有的点云补偿到某一个时刻,这样就可以把本身在过去100ms 内收集的点云统一到一个时间点上去
P
s
t
a
r
t
=
T
s
t
a
r
t
c
u
r
r
e
n
t
∗
P
c
u
r
r
e
n
t
P_{start}=T_{start_current} * P_{current}
Pstart=Tstartcurrent∗Pcurrent
运动补偿需要知道每个点该时刻对应的位姿$ T_{start_current $,通常有几种做法:
- 如果有高频里程记,可以比较方便的获取每个点相对起始扫描时刻的位姿
- 如果有 imu,可以方便的求出每个点相对起始点的旋转
- 如果没有其他传感器,可以使用匀速模型假设,使用上一个帧间里程记的结果作为当前两帧之间的运动,同时假设当前帧也是匀速运动,也可以估计出每个点相对起始时刻的位姿
代码对应laserOdometry.cpp
去畸变
TransformToStart()函数 将输入的点云坐标转到起始时刻
输入点云信息
对于旋转,使用Eigen的四元数插值得到当前时刻的四元数
对于平移,使用根据时间占当前周期的比例直接相乘
由于kitti里面是补偿过的,因此这里比例都设置为1
输出去畸变后的点云
TransformToEnd()函数 将输入的点云坐标转到结束时刻
先调用TransformToStart()将输入点云转到起始时刻
根据帧到起始时刻到结束时刻的位姿信息,将点云转到结束时刻
主函数
- 定义节点laserOdometry
- 设置参数
- 订阅scanRegistration发布的角点、面点、有效点云5个topic,每个回调函数只负责把输入存入数组
- 发布5个topic,分别是
- while循环实现激光里程计
** while循环 **
1.触发一次回调函数(spinOnce)
2. ros消息转为pcl格式
3. 第一帧的点云信息不处理,只加入kd tree。对第二帧开始构建约束求解,对于点线约束,构建当前点和上一帧两点的距离约束,两个点分别是kd tree中最近的点和不同扫描线上较近的点;对于点面约束,找的三个面点分别是kd tree最近的点、相同扫描线较近的点、不同扫描线较近的点。
4. 根据约束构建ceres优化器,迭代4次进行优化
5. 递推更新相对世界系的位姿
6. 将当前帧点云加入kd tree,发布雷达里程计信息、路径、将较平坦的面点、曲率较大的角点、有效角点转为ros发布,用于后端
后端流程
laserMapping.cpp
main()函数
建立laserMapping节点,加载体素滤波参数,订阅前端点云和里程计信息,回调函数就是把信息存进队列。将后端数组复位,建立process线程进行处理
process()函数
1.里程计、点云、面点队列的首个元素时间戳都和角点队列的首个元素时间戳对齐,然后将首个元素都转为ros格式并弹出,清空角点数组以保证每次处理的实时性
2.将前端得到的位姿转到后端地图下
T
m
a
p
_
c
u
r
=
T
m
a
p
_
o
d
o
m
∗
T
o
d
o
m
_
c
u
r
T_{map\_cur}=T_{map\_odom} * T_{odom\_cur}
Tmap_cur=Tmap_odom∗Todom_cur
得到当前帧在地图中的初始估计
3.根据初始估计确定在栅格中的索引,每个栅格是505050的正方体,宽21个(x)、高21个(y)、深11个(z),一共4851个。如果当前点的栅格太靠左,就将整体右移,将第i-1个栅格点云放到第i个,靠近右边界就左移,其他两个轴也这样操作,这样移动完后会空出一列。经过这个步骤保证当前的位姿步骤栅格地图的边缘。
4.取出当前栅格附近 250250150的局部小地图做当前帧的配准,取出小地图的栅格id以及点云信息。
5.对当前帧的角、面特征下采样。下采样后如果还有足够的特征,进行优化。对于点线约束,先将角点点云投影到当前坐标系下,使用kd tree从小地图找到5个最近的角点,最远的必须小于1m,然后计算这个五个点的协方差矩阵,使用eigen进行特征值分解,如果最大特征值大于次大特征值的3倍,就认为是线特征,可以添加到ceres优化器。对于点面约束,同样kd tree搜索5个最近面点,计算其法向量,然后判断每个点到平面的距离,都小于0.2则将当前点和法向量送入优化器,开始优化。
6.进行位姿更新
T
m
a
p
_
o
d
o
m
=
T
m
a
p
_
c
u
r
∗
T
o
d
o
m
_
c
u
r
−
1
T_{map\_odom}=T_{map\_cur} * T_{odom\_cur}^{-1}
Tmap_odom=Tmap_cur∗Todom_cur−1
7.将当前帧优化后的点云加到局部地图,将特征投影到地图坐标系,计算其在栅格中的位置,得到索引后加入一维数组。
8.对局部地图进行体素滤波,然后发布位姿、轨迹、tf、点云信息。