文章目录
- 运行环境:
- 思路:
- 1.1 设置固定IP
- 2.1 修改hosts文件
- 3.1 检查是否成功通信
- 4.1 修改bashrc
- 5.1 演示
运行环境:
ubuntu20.04 noetic
宏基暗影骑士笔记本
思路:
主机启动roscore和乌龟速度订阅节点,从机启动乌龟键盘控制节点,通过从机来控制主机中的乌龟运动。
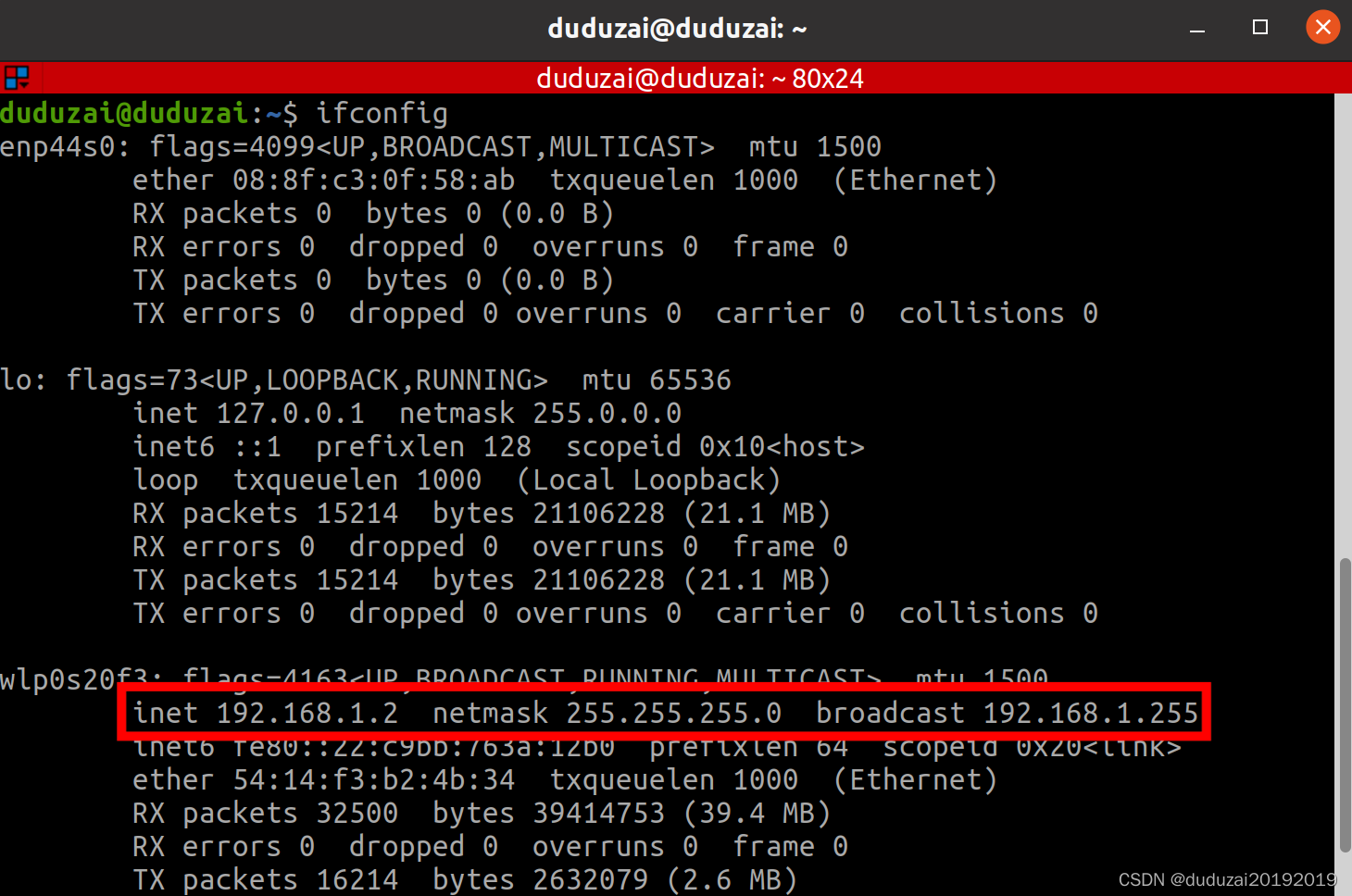
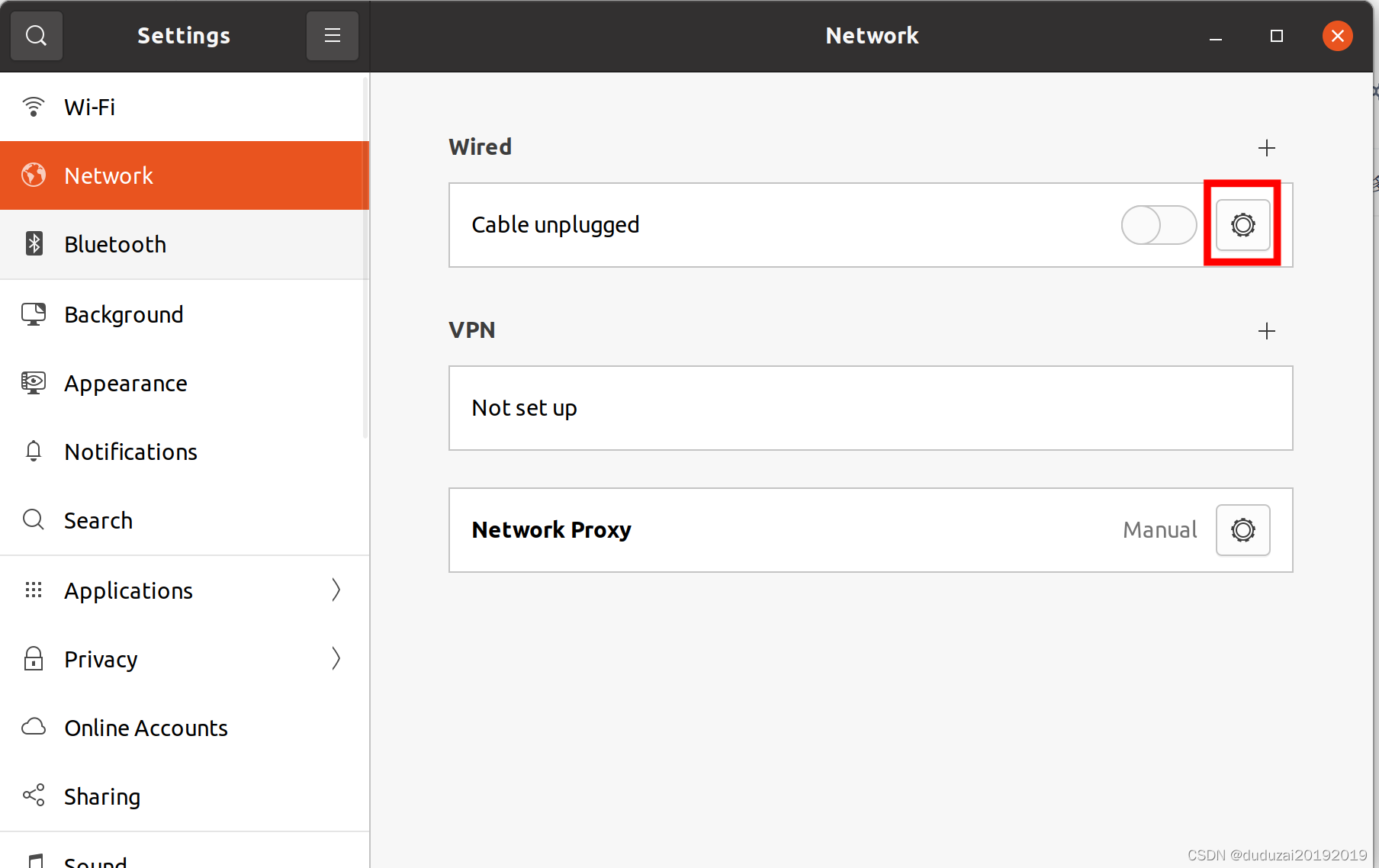
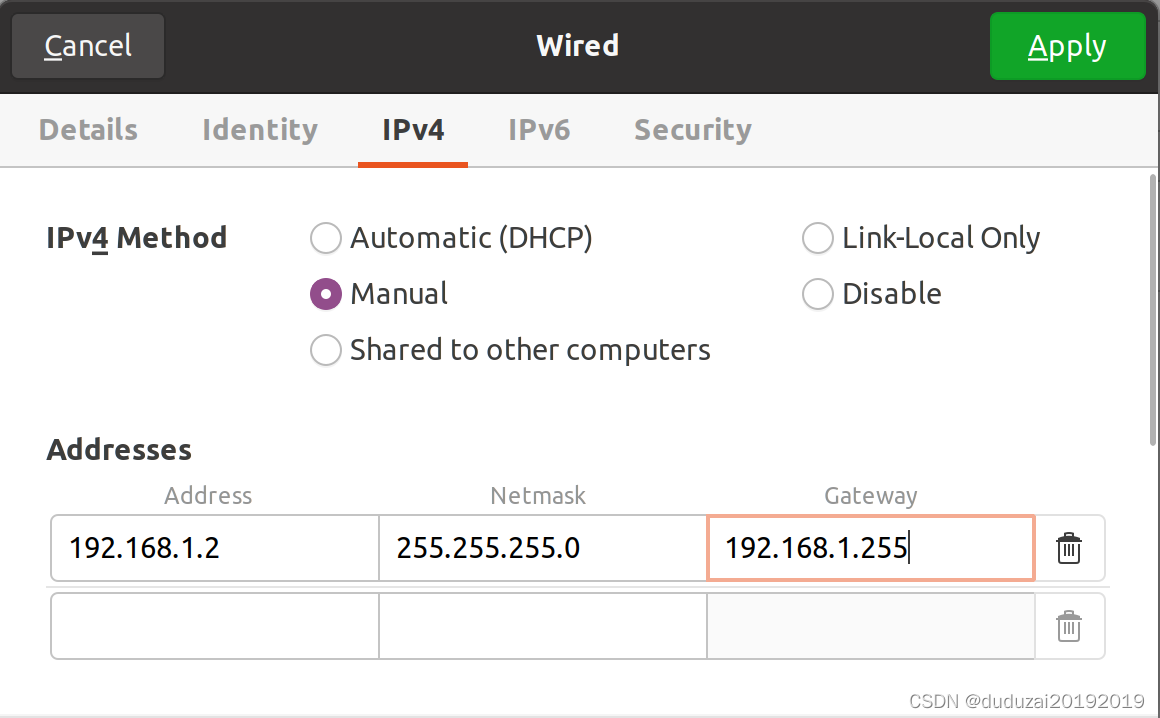
1.1 设置固定IP
主机和从机都分别执行下面的操作
ifconfig
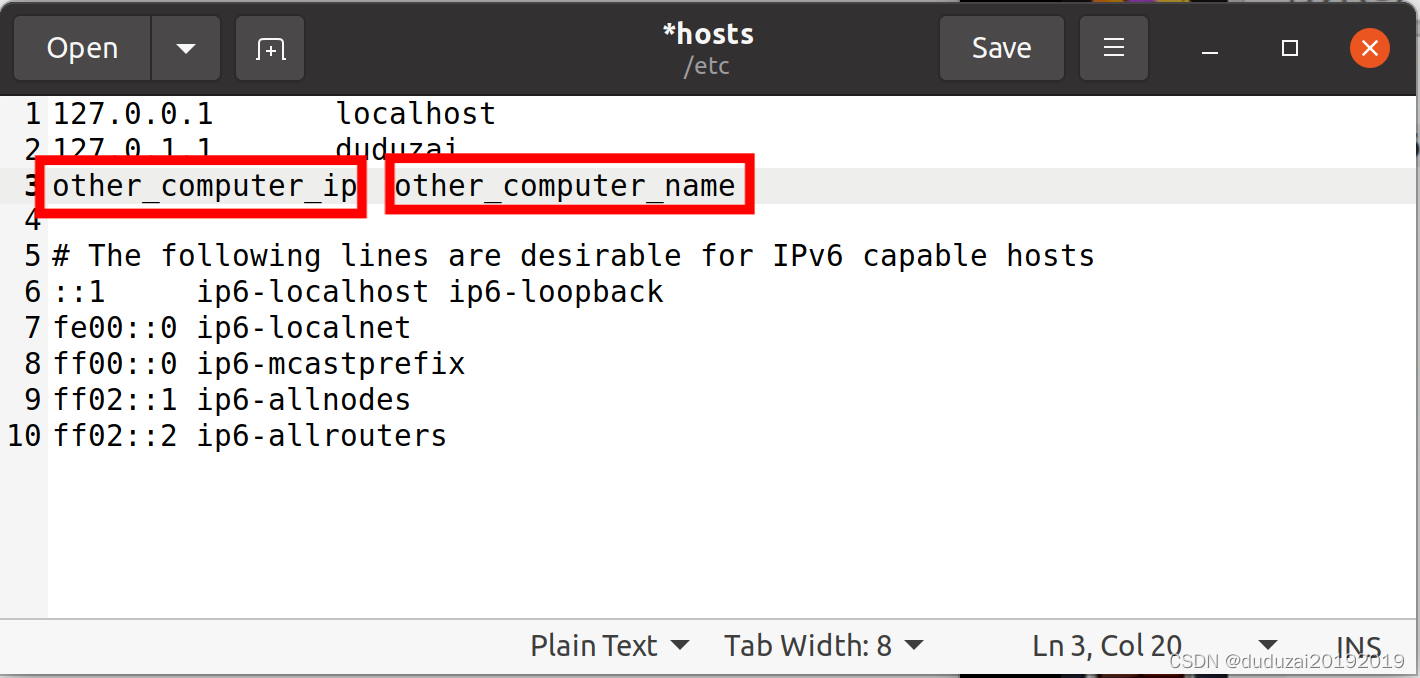
2.1 修改hosts文件
主机和从机都分别执行下面的操作
sudo gedit /etc/hosts
另一台计算机的ip 和 它的hostname
# hostname查询
duduzai@duduzai:~$ hostname
duduzai
保存后重启计算机
3.1 检查是否成功通信
ping 对方的IP
4.1 修改bashrc
1)配置主机的bashrc
gedit ~/.bashrc
主机端配置 (自己的IP+端口号, 自己的IP)
export ROS_MASTER_URI=http://主机IP:11311
export ROS_HOSTNAME=主机IP
更新环境配置
source .bashrc
2)配置从机的bashrc
gedit ~/.bashrc
从机端配置 (主机的IP+端口号, 自己的IP)
export ROS_MASTER_URI=http://主机IP:11311
export ROS_HOSTNAME=从机IP
更新环境配置
source .bashrc
5.1 演示
1)主机:启动订阅速度节点
roscore
rosrun turtlesim turtlesim_node
2)从机:启动发布键盘控制节点
rosrun turtlesim turtle_teleop_key