目录
1 紧耦合、松耦合的区别
(1)紧耦合和松耦合的区别
(2)紧耦合和松耦合的分类
(3)为什么要使用紧耦合
2 SIFT和SUFT的区别
3 视差与深度的关系
4 闭环检测常用方法
5 描述PnP算法
6 梯度下降法、牛顿法、高斯-牛顿法的区别
7 什么是极线约束
8 单目视觉SLAM中尺寸漂移是怎么产生的
9 描述特征点法和直接法的优缺点
10 边缘检测算子有哪些?
1 紧耦合、松耦合的区别
(1)紧耦合和松耦合的区别
紧耦合:是把图像的特征加到特征向量中去,这样做优点是可以免去中间状态的累计误差,提高精度,缺点是系统状态向量的维数会非常高,需要很高的计算量;
松耦合:是把VO处理后获得的变换矩阵和IMU进行融合,这样做优点是计算量小但是会带来累计误差。
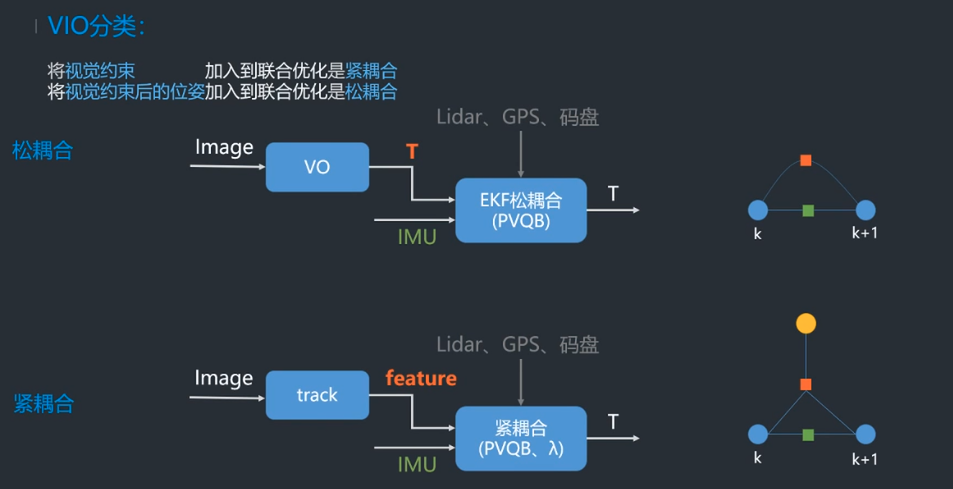
(2)紧耦合和松耦合的分类
| vio | filter-based | optimization-based |
| 紧耦合 | MSCKF,ROVIO | OKVIS,VINS |
| 松耦合 | ssf,msf | Inertial Aided Dense & Semi-Dense Methods for Robust Direct Visual Odometry |
(3)为什么要使用紧耦合
- 单纯凭(单目)视觉或IMU都不具备估计Pose的能力:视觉存在尺度不确定性、IMU存在零偏导致漂移;
- 松耦合中,视觉内部BA没有IMU的信息,在整体层面来看不是最优的。
- 紧耦合可以一次性建模所有的运动和测量信息,更容易达到最优。
2 SIFT和SUFT的区别
- 构建图像金字塔:SIFT特征利用不同尺寸的图像与高斯差分滤波器卷积;SURF特征利用原图片与不同尺寸的方框滤波器卷积。
- 特征描述子:SIFT特征有4×4×8=128维描述子,SURF特征有4×4×4=64维描述子。
- 特征点检测方法:SIFT特征先进行非极大抑制,再去除低对比度的点,再通过Hessian矩阵去除边缘响应过大的点;SURF特征先利用Hessian矩阵确定候选点,然后进行非极大抑制。
- 特征点主方向:SIFT特征在正方形区域内统计梯度幅值的直方图,直方图最大值对应主方向,可以有多个主方向;SURF特征在圆形区域内计算各个扇形范围内x、y方向的haar小波响应,模最大的扇形方向作为主方向。
3 视差与深度的关系
在相机完成校正后,则有 d / b = f / z,其中 表示左右图的横坐标之差,称为视差,b表示基线,f是焦距,z是深度。这个公式其实很好记,在深度和焦距确定的情况下,基线越大,视差也会越大。

4 闭环检测常用方法
ORB SLAM中采用的是词袋模型进行闭环检测筛选出候选帧,再通过求解Sim3判断最合适的关键帧。
LSD SLAM中的闭环检测主要是根据视差、关键帧连接关系,找出候选帧,然后对每个候选帧和测试的关键帧之间进行双向Sim3跟踪,如果求解出的两个李代数满足马氏距离在一定范围内,则认为是闭环成功。
5 描述PnP算法
已知空间点世界坐标系坐标和其像素投影,公式如下:

目前一共有两种解法,直接线性变换方法(一对点能够构造两个线性约束,因此12个自由度一共需要6对匹配点),另外一种就是非线性优化的方法,假设空间坐标点准确,根据最小重投影误差优化相机位姿。
目前有两个主要场景,其一是求解相机相对于某2维图像/3维物体的位姿;其二就是SLAM算法中估计相机位姿时通常需要PnP给出相机初始位姿。
在场景1中,我们通常输入的是物体在世界坐标系下的3D点以及这些3D点在图像上投影的2D点,因此求得的是相机坐标系相对于世界坐标系(Twc)的位姿
在场景2中,通常输入的是上一帧中的3D点(在上一帧的相机坐标系下表示的点)和这些3D点在当前帧中的投影得到的2D点,所以它求得的是当前帧相对于上一帧的位姿变换
6 梯度下降法、牛顿法、高斯-牛顿法的区别
在BA优化、PnP、直接法里面都有接触到非线性优化问题,上面几种方法都是针对对非线性优化问题提出的方法,将非线性最优化问题作如下展开,就可以获得梯度下降法和牛顿法

梯度下降法是一个一阶最优化算法,通常也称为最速下降法。 要使用梯度下降法找到一个函数的局部极小值,必须向函数上当前点对应梯度(或者是近似梯度)的反方向的规定步长距离点进行迭代搜索。因此指保留一阶梯度信息。缺点是过于贪心,容易走出锯齿路线。

牛顿法是一个二阶最优化算法,基本思想是利用迭代点处的一阶导数(梯度)和二阶导数(Hessen矩阵)对目标函数进行二次函数近似。因此保留二阶梯度信息。缺点是需要计算H矩阵,计算量太大。
![]()
而把非线性问题,先进行一阶展开,然后再作平方处理就可以得到高斯-牛顿法和列文博格方法
高斯-牛顿法对上式展开并对Δ x进行求导即可得高斯牛顿方程,其实其就是使用![]() 对牛顿法的H矩阵进行替换,但是
对牛顿法的H矩阵进行替换,但是![]() 有可能为奇异矩阵或变态,Δ x也会造成结果不稳定,因此稳定性差。
有可能为奇异矩阵或变态,Δ x也会造成结果不稳定,因此稳定性差。
![]()
列文博格法就是在高斯-牛顿法的基础上对Δ x添加一个信赖区域,保证其只在展开点附近有效,即其优化问题变为带有不等式约束的优化问题,利用Lagrange乘子求解。
![]()
![]()
7 什么是极线约束
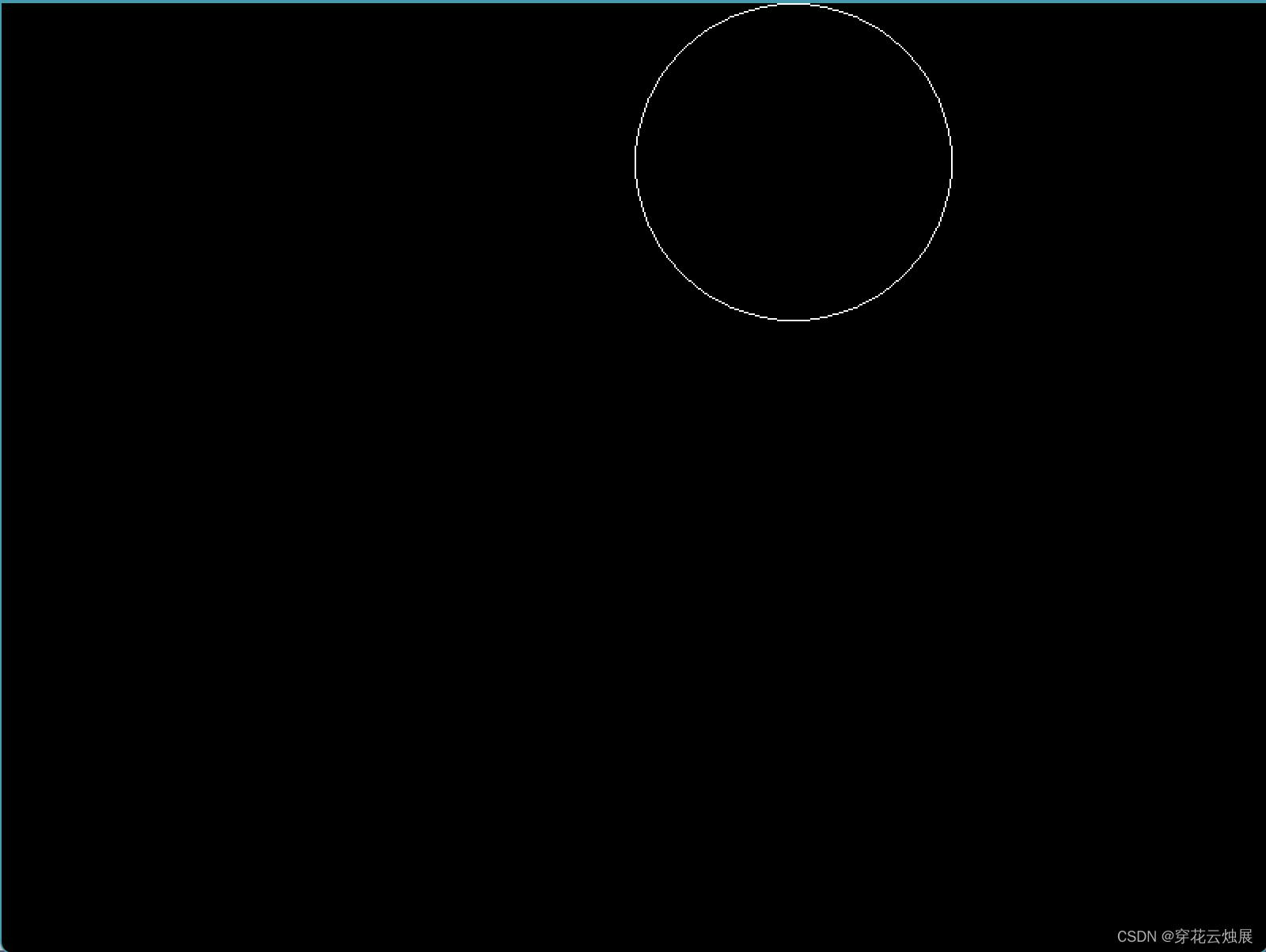
极线约束描述的是当同一个点投影到两个不同视角的图像上时,特征点、相机光心在投影模型下形成的约束,所谓极线约束就是说同一个点在两幅图像上的映射,已知左图映射点p1,那么右图映射点p2一定在相对于p1的极线上,这样可以减少待匹配的点数量。
如图所示, 两个相机光心连线为O1O2被称为基线,基线与像平面image1和image2的交点e1、e2被称为基点;平面PO1O2被称为极平面,极平面与像平面image1和image2的交线e1P1、e2P2被称为极线。
如果世界点P(未知)在image1上的特征点为P1(已知),那么世界点P必定在P1O1O2所在平面上,即世界点P在image2上的像点必然在平面P1O1O2与像平面image2的交线e2P2上。这就是极线约束。

8 单目视觉SLAM中尺寸漂移是怎么产生的
用单目估计出来的位移,与真实世界相差一个比例,叫做尺度。这个比例在单目初始化时通过三角化确定,但单纯靠视觉无法确定这个比例到底有多大。由于SLAM过程中噪声的影响,这个比例还不是固定不变的。修正方式是通过回环检测计算Sim3进行修正。
9 描述特征点法和直接法的优缺点
特征点法
- 优点:1. 没有直接法的强假设,更加精确;2. 相较与直接法,可以在更快的运动下工作,鲁棒性好
- 缺点:1. 特征提取和特征匹配过程耗时长;2. 特征点少的场景中无法使用;3.只能构建稀疏地图
直接法
- 优点:1.省去了特征提取和特征匹配的时间,速度较快;2. 可以用在特征缺失的场合;3. 可以构建半稠密/稠密地图
- 缺点:1. 易受光照和模糊影响;2.运动必须慢;3.非凸性,易陷入局部极小解
10 边缘检测算子有哪些?
边缘检测一般分为三步,分别是滤波、增强、检测。基本原理都是用高斯滤波器进行去噪,之后在用卷积内核寻找像素梯度。常用有三种算法:canny算子,sobel算子,laplacian算子
canny算子:一种完善的边缘检测算法,抗噪能力强,用高斯滤波平滑图像,用一阶偏导的有限差分计算梯度的幅值和方向,对梯度幅值进行非极大值抑制,采用双阈值检测和连接边缘。
sobel算子:一阶导数算子,引入局部平均运算,对噪声具有平滑作用,抗噪声能力强,计算量较大,但定位精度不高,得到的边缘比较粗,适用于精度要求不高的场合。
laplacian算子:二阶微分算子,具有旋转不变性,容易受噪声影响,不能检测边缘的方向,一般不直接用于检测边缘,而是判断明暗变化。




![[Java Web]element | 一个由饿了么公司开发的前端框架,让你快速构建现代化、美观的 Web 应用程序。](https://img-blog.csdnimg.cn/e495f6b49c954e3ea7e9991f496bbe45.png)