基于开源软件的无人机飞行仿真
摘 要
飞行控制算法设计和仿真是无人机研制的关键步骤。为了缩短无人机飞行控制算法设计周期和试验成本,对无人
机纵向和侧向控制算法进行了设计,并基于开源软件开发了固定翼无人机可视化的飞行仿真系统,
固定翼
对飞行控制算法进行仿真
实验。仿真结果显示,飞行仿真系统实时且直观,通过对飞行仿真试验数据的综合分析,验证了飞行控制算法的有效性,该飞
行仿真系统可广泛应用于无人机飞行控制算法的仿真验证。
广泛应用无人机飞行控制算法 的仿真验证
关键词 无人机; 仿真; 飞行控制; 开源软件
引言
无人机( unmanned aerial vehicle,UAV) 飞行控
制的算法设计和验证是无人机研制的关键环节[1],
一句话概括完第一段 非常简洁有力的表达的方法
无人机外回路的飞行控制算法应用较为广泛的是
经典控制算法,如比例-积分-微分( proportion-integration-differentiation,PID) [2],但是该算法的参数一般固定不变,在变量多、非线性的情况下控制效果不佳。目前,还存在很多非线性控制方法,这些方法可以很好地实现无人机的飞行控制并且自适应速率较小[3]
它写仿真平台的 ,引言说其他人的控制算法
,比如文献[4]针对无人机滚转控制提出了非线性 L1 控制算法,
它写仿真平台的 ,引言说其他人的控制算法 这比单纯的说平台有意思
但是并没有对其纵向控制算法进行设计,仅仅采用了 MATLAB 对算法本身进行了仿真验证。
纵向算法是什么,怎么进行仿真验证
文献[5]和文献[6]中提出了实现油门和升降舵控制解耦的总能量控制( total energy control system,TECS) 算法,并在纵向通道分别对飞机和导弹的高度与速度进行了解耦控制。
TECE 算法
‘文献[7]则在对固定翼无人机数学模型进行分析基础上,基于 MATLAB 对纵向飞行控制律进行了设计仿真。
纵向算法
文献[5]和文献[7]未提及横侧向通道的算法设计,
非常简洁有力的表达方法 ,直接说没有提到 横侧通道算法设计
文献[6]在横侧向通道上则采取了比例式控制律,相关仿真验证均为基于 MATLAB 对算法性能的验证。
比例控制规律
文献[8]指出,飞行仿真可以对无人机的稳定
性和可操作性、飞行控制系统性能进行检验并改
进,降低在实际飞行中的操作风险,并对无人机全
系统进行了仿真和测试,但系统设计基于商业研发
用途,难以复现,并且不包含实时的视景展示。
文献[9]针对无人机的飞行控制仿真采用了硬件在环仿真的形式,将无人机真实的控制器与无人机机体等虚拟部分联合组成的仿真系统,但这种仿真方式如果没有加上真实的转台进行测试。
与软件在环仿真[10]没有很大的区别,即完全用计算机就可以拟出无人机飞行时的状态。
把第一段的内容,放在了较后来描述
基于上述研究,现针对无人机的飞行控制算法设计和仿真问题,研究无人机横侧向 L1 控制和纵向总能量控制算法的集成与具体实现。
其实它不光光搭建了平台,还写了算法 L1 控制 和 纵向总能量控制算法
并基于开源软件,采用软件在环仿真的方式开发无人机的飞行仿真系统,用于验证所设计无人机飞行控制算法性能,并且可以通过视景仿真进行直观显示和分析。
然后搭建了仿真平台
文章结构部分
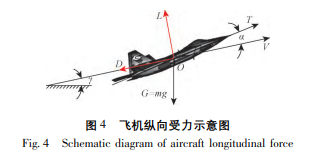
- 1 无人机轨迹控制算法
-
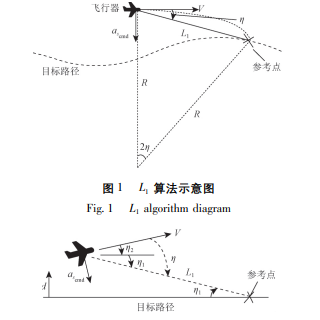
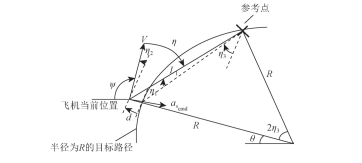
- 1.1 L1算法
-
- 1.2 总能量控制 TECS
-
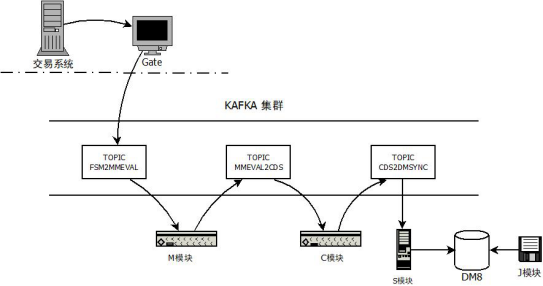
- 开源无人机软件
-
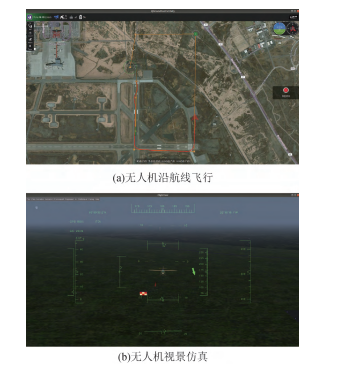
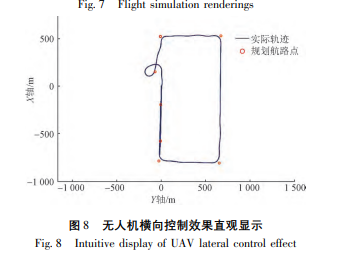
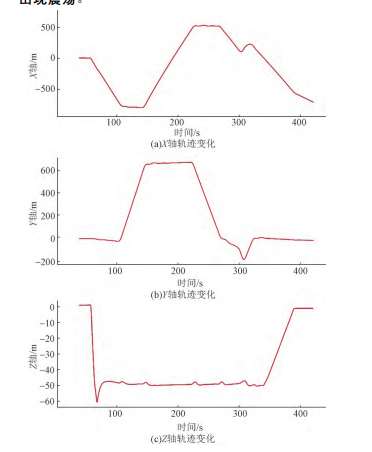
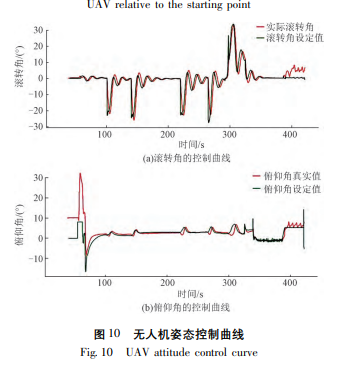
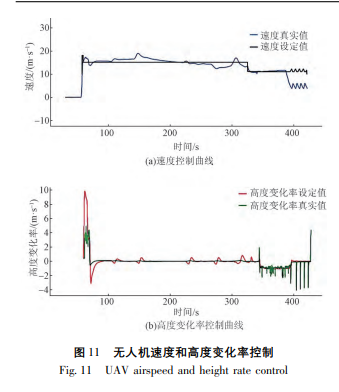
- 无人机飞行仿真
- 3.1 仿真配置及其实现
- 3.2 仿真结果
配图部分
配图大多都是跟着 公式紧密结合的这里看个大概:

好了 这就是上部分是 ,下部分再来深究一下它写了什么