多时相雷达数据(multi-tempral LiDAR data)
1 一种多时相激光雷达数据建筑物变化检测方法-汪承义(2013)
背景:空间分辨率的提高引入了“类内可分性”增加与“类间可分性”降低;遮挡与阴影的存在使问题变得复杂化。另一方面,多个时相光学影像实现变化检测会受到季节、天气、成像时间、阴影等的影响,变化检测的结果和精度很难得到保证。不同时相的航空激光雷达数据可以有效描述区域空间特征,此特征不受激光季节、光照条件的影响。
研究方法:建筑物变化检测及类型确定的主要思路是对变化靶区前时相和后时相激光雷达数据实现建筑物信息提取,并计算建筑物相似度,最终实现建筑变化检测及变化类型确定。
将建筑物变化靶区矢量化的多边形作为建筑物变化研究对象,提取前后时相的DSM纹理特征。利用上述特征,对各靶区前后时相数据进行建筑物分类。借助建筑物边界线及边界线内部点构建的TIN模拟屋顶,得到建筑物的模型,同时构建建筑物模型的形状算子特征向量,通过计算前后对应建筑物形状算子特征向量的距离得到建筑物之间的相似度,最后进一步确定变化靶区是否实际发生变化。
评价:此文是国内较早利用机载多时相激光雷达进行建筑物变化检测的文献,其中基于DSM数据采用了SIFT方法进行不同时相的点云数据配准,其中所用到的多时相数据,仅仅是指同一区域的某个时间的点云数据和之后某个时间的点云数据,更倾向于叫做“双时相”点云数据,最终目的在于计算得到前后两个时刻点云之间的差异(由于是建筑物,所以作者采用了纹理信息和相对应的特征算子;若是应用在其他方面,则可以适当更换采用的特性信息以适应研究)。
2 面向城市场景异源多时相点云的自动配准-杨泽鑫(2023)
背景:异源多时相点云数据是建设数字城市和智慧社会的关键空间数据支撑,其准确配准是开展各类后续应用的前提。面向城市场景的异源多时相点云的无控配准仍然是具有挑战,主要有以下三个方面:
(1)数据规模大。异源多时相点云配准多针对的是已经实现了同源、单时相数据融合的点云间的匹配;
(2)异源点云的结构差异大。
(3)多时相点云的场景变化大。
以往的研究是提取建筑物的局部角点或拟合边界线作为配准基元以实现面向城市场景的点云配准。但是,异源点云的数据结构相差比较大,局部特征冗余性强,并且在匹配时易导致一对多、多对多、空匹配的相似性度量结果,作为 配准依据不够可靠。
为解决上述缺点,作者提出不直接从点云中提取的原始点线特征为配准基元,而是生成对象级的虚拟关键点作为配准基元。对象级的虚拟关键点是由拟合所得的建筑物平面模型交汇而成的特征增线段的端点,不是输入点云中的原始点。
每个拟合的平面模型均有充足的原始点参与统计,所以生成的虚拟关键点准确度高、数量少、特异性强,特别是对数据缺失和离群点的稳健性好,在待配准的点云对中找到对应基元的概率更高。具体实现时,基于区域增长的思想熊剩余点云中拟合平面。利用停止增长的边界点来记录平面间的邻接关系,后续只须交汇相邻的平面来生成特征线段,避免任意平面两两相交的复杂计算,以减少错误的交线。

3 基于多时相点云数据的作物表型参数获取及动态量化方法研究-阳旭(2019)
作者提到,目前植物外表型研究的成像方法或技术主要分为五类:
(1)可见光成像。(2)红外成像。(3)荧光成像技术。(4)光谱成像。(5)激光测距技术及其他成像。
其中,激光测距技术在农作物中的应用一般是利用激光扫描技术重建作物局部器官模型或完整三维模型,然后通过作物的局部器官模型或完整三维模型来完成作物表型的研究。
文中阐述的多时相,更多的是不同生长阶段下用激光雷达对作物进行扫描,获取三维模型;与遥感、自动驾驶领域的多时相点云有一定差距。遥感、自动驾驶中的多时相点云往往时间间隔更短、采集的环境点云信息更多样、数据量更大,而且测绘遥感中,多时相点云是研究者的研究对象,研究不同时相点云之间的配准、变化、融合和预测,而农业中的多时相点云往往是研究者的工具或不同时间节点下实验物品的瞬时记录,用于后续的枝干、叶片的分割,植物体型信息的记录和模拟(植物信息从以往的记在纸上的笔记转为记录在计算机内的数据)。
4 基于多时相点云数据的大型古建筑形变监测研究——以苏州虎丘塔为例-陆建华(2016)
选用Faro公司Focus3D三维激光扫描仪对虎丘塔进行点云数据采集,Faro Focus3D参数如表所示。
| 技术规格 | 参数 |
|---|---|
| 扫描方式 | 相位式 |
| 测量范围 | 0.6~120m |
| 测量速率 | 976000点/s |
| 垂直视野 | 300° |
| 水平视野 | 360° |
| 点位误差 | ±2mm |
利用该扫描仪对虎丘塔外部进行了两期(维修前、维修后)数据采集,借助脚手架平台以分层扫描方式确保整体塔身数据的完整性。垂直方向共架设14层(如图3所示),水平方向在每层的塔角处分设8个测站(如图所示)。
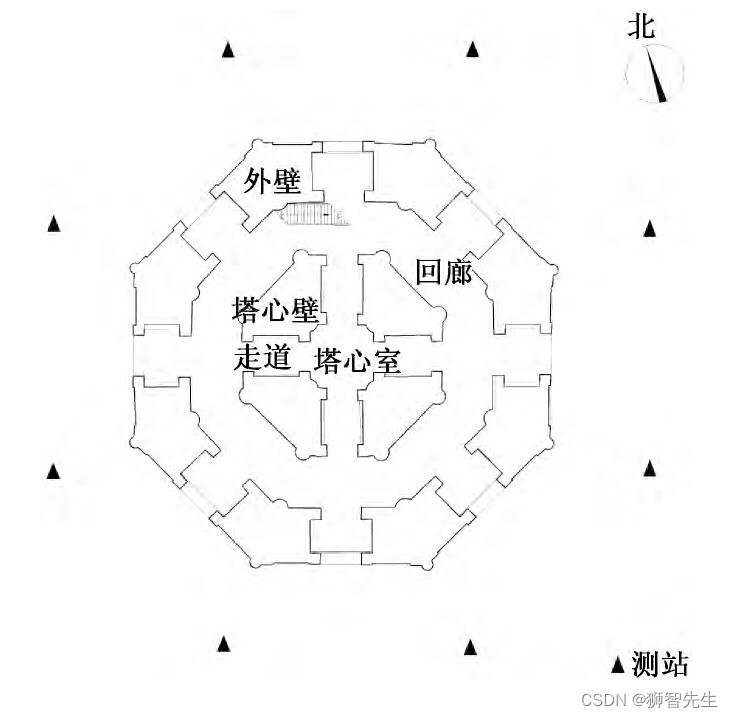
仍然是不同时间节点下的物体三维数据。
5 基于多时相机载LiDAR点云的建筑物三维变化检测-刘正军(2013)
作者采用机载激光雷达三维扫描技术,针对同一监测区域分析对比多时相的数字表面模型 (digital surface model, DSM) 成果数据,探索城区建筑物的变化检测方法;通过多时相点云进行精确的相对配准,并进行阈值分割与统计分析,将变化图斑按照新建、拆除及扩建等属性进行分类和赋值,实现了城市建筑物的三维变化检测,形成了可行的技术路线和方法流程。
目前来看,国内面向自动驾驶和短时间间距下的多时相点云处理的研究,还不是很多。
(后续继续更新,补充国外关于多时相点云的一些研究情况)


![[学习笔记] 2. 数据结构](https://img-blog.csdnimg.cn/0d711df50cb14ed783ae2c315bda1137.png#pic_center)