init概述
init是一个进程,确切地说,它是Linux系统中用户空间的第一个进程。由于Android是基于Linux内核的,所以init也是Android系统中用户空间的第一个进程,它的进程号是1。作为天字第一号的进程,init被赋予了很多极其重要的工作职责,本章将关注其中两个比较重要的职责:
- init进程负责创建系统中的几个关键进程,尤其是下一章要介绍的Zygote,它更是Java世界的开创者。那么,init进程是如何创建Zygote的呢?
- Android系统有很多属性,于是init就提供了一个property service(属性服务)来管理它们。那么这个属性服务是怎么工作的呢?
如上所述,本章将通过下面两方面内容来分析init:
- init如何创建zygote。
- init的属性服务是如何工作的。
init分析
init进程的入口函数是main,它的代码如下所示:
init.c
int main(int argc, char **argv)
{
int device_fd = -1;
int property_set_fd = -1;
int signal_recv_fd = -1;
int keychord_fd = -1;
int fd_count;
int s[2];
int fd;
struct sigaction act;
char tmp[PROP_VALUE_MAX];
struct pollfd ufds[4];
char *tmpdev;
char *debuggable;
//设置子进程退出的信号处理函数,该函数为sigchld_handler。
act.sa_handler = sigchld_handler;
act.sa_flags = SA_NOCLDSTOP;
act.sa_mask = 0;
act.sa_restorer = NULL;
sigaction(SIGCHLD, &act, 0);
......//创建一些文件夹,并挂载设备,这些是和Linux相关的,不拟做过多讨论。
mkdir("/dev/socket", 0755);
mount("devpts", "/dev/pts", "devpts", 0,NULL);
mount("proc", "/proc", "proc", 0, NULL);
mount("sysfs", "/sys", "sysfs", 0, NULL);
//重定向标准输入/输出/错误输出到/dev/_null_。
open_devnull_stdio();
/*
设置init的日志输出设备为/dev/__kmsg__,不过该文件打开后,会立即被unlink了,
这样,其他进程就无法打开这个文件读取日志信息了。
*/
log_init();
//上面涉及很多和Linux系统相关的知识,不熟悉的读者可自行研究,它们不影响我们的分析
//解析init.rc配置文件
parse_config_file("/init.rc");
......
//下面这个函数通过读取/proc/cpuinfo得到机器的Hardware名,我的HTCG7手机为bravo。
get_hardware_name();
snprintf(tmp,sizeof(tmp), "/init.%s.rc", hardware);
//解析这个和机器相关的配置文件,我的G7手机对应文件为init.bravo.rc。
parse_config_file(tmp);
/*
解析完上述两个配置文件后,会得到一系列的Action(动作),下面两句代码将执行那些处于
early-init阶段的Action。init将动作执行的时间划分为四个阶段:early-init、init、
early-boot、boot。由于有些动作必须在其他动作完成后才能执行,所以就有了先后之分。哪些
动作属于哪个阶段由配置文件决定。后面会介绍配置文件的相关知识。
*/
action_for_each_trigger("early-init", action_add_queue_tail);
drain_action_queue();
/*
创建利用Uevent和Linux内核交互的socket。关于Uevent的知识,第9章中对
Vold进行分析时会做介绍。
*/
device_fd = device_init();
//初始化和属性相关的资源
property_init();
//初始化/dev/keychord设备,这和调试有关,本书不讨论它的用法。读者可以自行研究,
//内容比较简单。
keychord_fd = open_keychord();
......
/*
INIT_IMAGE_FILE定义为”/initlogo.rle”,下面这个函数将加载这个文件作为系统的开机
画面,注意,它不是开机动画控制程序bootanimation加载的开机动画文件。
*/
if(load_565rle_image(INIT_IMAGE_FILE) ) {
/*
如果加载initlogo.rle文件失败(可能是没有这个文件),则会打开/dev/ty0设备,并
输出”ANDROID”的字样作为开机画面。在模拟器上看到的开机画面就是它。
*/
......
}
}
if(qemu[0])
import_kernel_cmdline(1);
......
//调用property_set函数设置属性项,一个属性项包括属性名和属性值。
property_set("ro.bootloader", bootloader[0] ? bootloader :"unknown");
......//执行位于init阶段的动作
action_for_each_trigger("init", action_add_queue_tail);
drain_action_queue();
//启动属性服务
property_set_fd = start_property_service();
/*
调用socketpair函数创建两个已经connect好的socket。socketpair是Linux的系统调用,
不熟悉的读者可以利用man socketpair查询相关信息。后面就会知道它们的用处了。
*/
if(socketpair(AF_UNIX, SOCK_STREAM, 0, s) == 0) {
signal_fd = s[0];
signal_recv_fd = s[1];
......
}
......
//执行配置文件中early-boot和boot阶段的动作。
action_for_each_trigger("early-boot", action_add_queue_tail);
action_for_each_trigger("boot", action_add_queue_tail);
drain_action_queue();
......
//init关注来自四个方面的事情。
ufds[0].fd = device_fd;//device_fd用于监听来自内核的Uevent事件
ufds[0].events = POLLIN;
ufds[1].fd = property_set_fd;//property_set_fd用于监听来自属性服务器的事件
ufds[1].events = POLLIN;
//signal_recv_fd由socketpair创建,它的事件来自另外一个socket。
ufds[2].fd = signal_recv_fd;
ufds[2].events = POLLIN;
fd_count = 3;
if(keychord_fd > 0) {
//如果keychord设备初始化成功,则init也会关注来自这个设备的事件。
ufds[3].fd = keychord_fd;
ufds[3].events = POLLIN;
fd_count++;
}
......
#if BOOTCHART
......//与Boot char相关,不做讨论了。
/*
Boot chart是一个小工具,它能对系统的性能进行分析,并生成系统启动过程的图表,
以提供一些有价值的信息,而这些信息最大的用处就是帮助提升系统的启动速度。
*/
#endif
for(;;) {
//从此init将进入一个无限循环。
int nr, i, timeout = -1;
for (i = 0; i < fd_count; i++)
ufds[i].revents = 0;
//在循环中执行动作
drain_action_queue();
restart_processes(); //重启那些已经死去的进程
......
#if BOOTCHART
...... // Boot Chart相关
#endif
//调用poll等待一些事情的发生
nr= poll(ufds, fd_count, timeout);
......
//ufds[2]保存的是signal_recv_fd,用于接收来自socket的消息。
if(ufds[2].revents == POLLIN) {
//有一个子进程去世,init要处理这个事情
read(signal_recv_fd, tmp, sizeof(tmp));
while (!wait_for_one_process(0))
;
continue;
}
if(ufds[0].revents == POLLIN)
handle_device_fd(device_fd);//处理Uevent事件
if(ufds[1].revents == POLLIN)
handle_property_set_fd(property_set_fd);//处理属性服务的事件。
if(ufds[3].revents == POLLIN)
handle_keychord(keychord_fd);//处理keychord事件。
}
return 0;
}
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899100101102103104105106107108109110111112113114115116117118119120121122123124125126127128129130131132133134135136137138139140141142143144145146147148149150151152153154155156157158159160161162163164165166167168169
从上面的代码中可知,init的工作任务还是很重的。上面的代码虽已省略了不少行,可结果还是很长,不过从本章要分析的两个知识点来看,可将init的工作流程精简为以下四点:
- 解析两个配置文件,其中,将分析对init.rc文件的解析。
- 执行各个阶段的动作,创建Zygote的工作就是在其中的某个阶段完成的。
- 调用property_init初始化属性相关的资源,并且通过property_start_service启动属性服务。
- init进入一个无限循环,并且等待一些事情的发生。重点关注init如何处理来自socket和来自属性服务器相关的事情。
精简工作流程,是以后分析代码时常用的方法。读者在分析代码的过程中,也可使用这种方法。
解析配置文件
根据上面的代码可知,在init中会解析两个配置文件,其中一个是系统配置文件init.rc,另外一个是和硬件平台相关的配置文件。以HTC G7手机为例,这个配置文件名为init.bravo.rc,其中bravo是硬件平台的名称。对这两个配置文件进行解析,调用的是同一个parse_config_file函数。下面就来看这个函数,在分析过程中以init.rc为主。
parser.c
int parse_config_file(const char *fn)
{
char *data;
data = read_file(fn, 0);//读取配置文件的内容,这个文件是init.rc。
if (!data) return -1;
parse_config(fn,data); //调用parse_config做真正的解析
return 0;
}
12345678
读取完文件的内容后,将调用parse_config进行解析,这个函数的代码如下所示:
parser.c
static void parse_config(const char *fn, char*s)
{
struct parse_state state;
char *args[SVC_MAXARGS];
int nargs;
nargs = 0;
state.filename = fn;
state.line = 1;
state.ptr = s;
state.nexttoken = 0;
state.parse_line = parse_line_no_op; //设置解析函数,不同的内容用不同的解析函数
for (;;) {
switch(next_token(&state)) {
case T_EOF:
state.parse_line(&state, 0, 0);
return;
caseT_NEWLINE:
if (nargs) {
//得到关键字的类型
int kw = lookup_keyword(args[0]);
if (kw_is(kw, SECTION)) { //判断关键字类型是不是SECTION。
state.parse_line(&state,0, 0);
parse_new_section(&state,kw, nargs, args);//解析这个SECTION。
} else {
state.parse_line(&state, nargs, args);
}
nargs = 0;
}
break;
case T_TEXT:
......
break;
}
}
}
123456789101112131415161718192021222324252627282930313233343536
上面就是parse_config函数,代码虽短,实际却比较复杂。从整体来说,parse_config首先会找到配置文件的一个section,然后针对不同的 section使用不同的解析函数来解析。那么,什么是section呢?这和init.rc文件的组织结构有关。先不必急着去看init.rc,还是先到代码中去寻找答案。
关键字定义
keywords.h这个文件定义了init中使用的关键字,它的用法很有意思,先来看这个文件,代码如下所示:
keywords.h
#ifndef KEYWORD //如果没有定义KEYWORD宏,则走下面的分支
......//声明一些函数,这些函数就是前面所说Action的执行函数。
int do_class_start(int nargs, char **args);
int do_class_stop(int nargs, char **args);
......
int do_restart(int nargs, char **args);
......
#define __MAKE_KEYWORD_ENUM__ //定义一个宏
/*
定义KEYWORD宏,虽然有四个参数,不过这里只用第一个,其中K_##symbol中的##表示连接
的意思,即最后得到的值为K_symbol。symbol其实就是init.rc中的关键字
*/
#define KEYWORD(symbol, flags, nargs, func)K_##symbol,
enum { //定义一个枚举,这个枚举定义了各个关键字的枚举值。
K_UNKNOWN,
#endif
......
//根据上面KEYWORD的定义,这里将得到一个枚举值K_class,
KEYWORD(class, OPTION, 0, 0)
KEYWORD(class_start, COMMAND, 1, do_class_start)//K_class_start,
KEYWORD(class_stop, COMMAND, 1, do_class_stop)//K_class_stop,
KEYWORD(on, SECTION, 0, 0)//K_on,
KEYWORD(oneshot, OPTION, 0, 0)
KEYWORD(onrestart, OPTION, 0, 0)
KEYWORD(restart, COMMAND, 1,do_restart)
KEYWORD(service, SECTION, 0,0)
......
KEYWORD(socket, OPTION, 0, 0)
KEYWORD(start, COMMAND, 1,do_start)
KEYWORD(stop, COMMAND, 1,do_stop)
......
#ifdef __MAKE_KEYWORD_ENUM__
KEYWORD_COUNT,
};
#undef __MAKE_KEYWORD_ENUM__
#undef KEYWORD //取消KEYWORD宏定义
#endif
1234567891011121314151617181920212223242526272829303132333435363738
keywords.h好像没什么奇特,不过是个简单的头文件。为什么说它的用法很有意思呢?来看代码中是如何使用它的,如下所示:
parser.c
......//parser.c中将包含keywords.h头文件,而且还不只一次!!
//第一次包含keywords.h,根据keywords.h的代码,我们首先会得到一个枚举定义
#include "keywords.h"
/*
重新定义KEYWORD宏,这回四个参数全用上了,看起来好像是一个结构体。其中#symbol表示
一个字符串,其值为“symbol”。
*/
#define KEYWORD(symbol, flags, nargs, func) \
[K_##symbol ] = { #symbol, func, nargs + 1, flags, },
//定义一个结构体keyword_info数组,它用来描述关键字的一些属性,请注意里面的注释内容。
struct {
constchar *name; //关键字的名。
int(*func)(int nargs, char **args);//对应关键字的处理函数。
unsignedchar nargs;//参数个数,每个关键字的参数个数是固定的。
//关键字的属性,有三种属性,COMMAND、OPTION和SECTION。其中COMMAND有对应的处理函数
unsigned char flags;
} keyword_info[KEYWORD_COUNT] = {
[ K_UNKNOWN ] = { "unknown", 0, 0, 0},
/*
第二次包含keywords.h,由于已经重新定了KEYWORD宏,所以以前那些作为枚举值的关键字
现在变成keyword_info数组的索引了。
*/
#include "keywords.h"
};
#undef KEYWORD
//一些辅助宏,帮助我们快速操作keyword_info中的内容。
#define kw_is(kw, type) (keyword_info[kw].flags& (type))
#define kw_name(kw) (keyword_info[kw].name)
#define kw_func(kw) (keyword_info[kw].func)
#define kw_nargs(kw) (keyword_info[kw].nargs)
123456789101112131415161718192021222324252627282930313233
现在领略了keywords.h的神奇之处了吧?原来它干了两件事情:
- 第一次包含keyworks.h时,它声明了一些诸如do_classstart这样的函数,另外还定义了一个枚举,枚举值为K_class,K_mkdir等关键字。
- 第二次包含keywords.h后,得到了一个keyword_info结构体数组,这个keyword_info结构体数组以前面定义的枚举值为索引,存储对应的关键字信息,这些信息包括关键字名、处理函数、处理函数的参数个数,以及属性。
目前,关键字信息中最重要的就是symbol和flags了。什么样的关键字被认为是section呢?根据keywords.h的定义,symbol为下面两个的关键字表示section:
KEYWORD(on, SECTION, 0, 0)
KEYWORD(service, SECTION, 0, 0)
12
有了上面的知识,再来看配置文件init.rc的内容。
init.rc的解析
init.rc的内容如下所示:(我们截取了部分内容,注意,其中的注释符号是#。)
init.rc
on init #根据上面的分析,on关键字标示一个section,对应的名字是”init”
...... #下面所有的内容都属于这个section,直到下一个section开始时。
export PATH /sbin:/system/sbin:/system/bin:/system/xbin
export LD_LIBRARY_PATH /system/lib
export ANDROID_BOOTLOGO 1 #根据keywords.h的定义,export表示一个COMMAND
export ANDROID_ROOT /system
export ANDROID_ASSETS /system/app
...... #省略部分内容
on boot #这是一个新的section,名为”boot”
ifup lo#这是一个COMMAND
hostname localhost
domainname localdomain
......
#class_start也是一个COMMAND,对应函数为do_class_start,很重要,切记。
class_start default
......
#下面这个section的意思是:待属性persist.service.adb.enable的值变为1后,
#需要执行对应的COMMAND,这个COMMAND是start adbd
on property:persist.service.adb.enable=1
start adbd //start是一个COMMAND
on property:persist.service.adb.enable=0
stop adbd
......
#service也是section的标示,对应section的名为“zygote“
service zygote /system/bin/app_process -Xzygote/system/bin –zygote \
--start-system-server
socketzygote stream 666 #socket关键字表示OPTION
onrestart write /sys/android_power/request_state wake #onrestart也是OPTION
onrestart write /sys/power/state on
onrestart restart media
#一个section,名为”media”
service media /system/bin/mediaserver
user media
group system audio camera graphics inet net_bt net_bt_admin net_raw
iopriort 4
1234567891011121314151617181920212223242526272829303132333435
从上面对init.rc的分析中可知:
- 一个section的内容从这个标示section的关键字开始,到下一个标示section的地方结束。
- init.rc中出现了名为boot和init的section,这里的boot和init,就是前面介绍的动作执行四个阶段中的boot和init。也就是说,在boot阶段执行的动作都是由boot这个section定义的。
另外还可发现,zygote被放在了一个servicesection中。下面以zygote这个section为例,介绍service是如何解析的。
解析service
zygote对应的service section内容是:
init.rc::zygote
service zygote /system/bin/app_process -Xzygote/system/bin –zygote \
--start-system-server
socketzygote stream 666 #socket是OPTION
#下面的onrestart是OPTION,而write和restart是COMMAND
onrestart write /sys/android_power/request_state wake
onrestart write /sys/power/state on
onrestart restart media
1234567
解析section的入口函数是parse_new_section,它的代码如下所示:
parser.c
void parse_new_section(struct parse_state*state, int kw,
int nargs, char **args)
{
switch(kw) {
case K_service: //解析service,用parse_service和parse_line_service
state->context = parse_service(state, nargs, args);
if(state->context) {
state->parse_line = parse_line_service;
return;
}
break;
case K_on: //解析on section
......//读者可以自己研究
break;
}
state->parse_line = parse_line_no_op;
}
1234567891011121314151617
其中,service解析时,用到了parse_service和parse_line_service两个函数,在分别介绍它们之前,先看init是如何组织这个service的。
service结构体
init中使用了一个叫service的结构体来保存和service section相关的信息,不妨来看这个结构体,代码如下所示:
init.h::service结构体定义
struct service {
//listnode是一个特殊的结构体,在内核代码中用得非常多,主要用来将结构体链接成一个
//双向链表。init中有一个全局的service_list,专门用来保存解析配置文件后得到的service。
struct listnode slist;
constchar *name; //service的名字,对应我们这个例子就是”zygote”。
constchar *classname; //service所属class的名字,默认是”defult”
unsigned flags;//service的属性
pid_t pid; //进程号
time_t time_started; //上一次启动的时间
time_t time_crashed; //上一次死亡的时间
int nr_crashed; //死亡次数
uid_t uid; //uid,gid相关
gid_t gid;
gid_t supp_gids[NR_SVC_SUPP_GIDS];
size_t nr_supp_gids;
/*
有些service需要使用socket,下面这个socketinfo用来描述socket的相关信息。
我们的zygote也使用了socket,配置文件中的内容是socket zygote stream 666。
它表示将创建一个AF_STREAM类型的socket(其实就是TCP socket),该socket的名为“zygote”,
读写权限是666。
*/
struct socketinfo *sockets;
//service一般运行在单独的一个进程中,envvars用来描述创建这个进程时所需的环境变量信息。
struct svcenvinfo *envvars;
/*
虽然关键字onrestart标示一个OPTION,可是这个OPTION后面一般跟着COMMAND,
下面这个action结构体可用来存储command信息,马上就会分析到它。
*/
struct action onrestart;
//和keychord相关的内容
int *keycodes;
int nkeycodes;
int keychord_id;
//io优先级设置
int ioprio_class;
int ioprio_pri;
//参数个数
int nargs;
//用于存储参数
char *args[1];
};
123456789101112131415161718192021222324252627282930313233343536373839404142
我们现在已了解的service的结构体,相对来说还算是清晰易懂的。而zygote中的那三个onrestart该怎么表示呢?请看service中使用的这个action结构体:
init.h::action结构体定义
struct action {
/*
一个action结构体可存放在三个双向链表中,其中alist用于存储所有action,
qlist用于链接那些等待执行的action,tlist用于链接那些待某些条件满足后
就需要执行的action。
*/
struct listnode alist;
struct listnode qlist;
struct listnode tlist;
unsigned hash;
const char *name;
//这个OPTION对应的COMMAND链表,以zygote为例,它有三个onrestart option,所以
//它对应会创建三个command结构体。
struct listnode commands;
struct command *current;
};
123456789101112131415161718
了解了上面的知识后,你是否能猜到parse_service和parse_line_service的作用了呢?马上就来看它们。
parse_service
parse_service的代码如下所示:
parser.c
static void *parse_service(struct parse_state*state, int nargs, char **args)
{
struct service *svc; //声明一个service结构体
......
//init维护了一个全局的service链表,先判断是否已经有同名的service了。
svc =service_find_by_name(args[1]);
if(svc) {
...... //如果有同名的service,则不能继续后面的操作。
return 0;
}
nargs-= 2;
svc = calloc(1, sizeof(*svc) + sizeof(char*) * nargs);
......
svc->name = args[1];
svc->classname = "default";//设置classname为”default”,这个很关键!
memcpy(svc->args, args + 2, sizeof(char*) * nargs);
svc->args[nargs] = 0;
svc->nargs = nargs;
svc->onrestart.name = "onrestart";
list_init(&svc->onrestart.commands);
//把zygote这个service加到全局链表service_list中。
list_add_tail(&service_list, &svc->slist);
return svc;
}
1234567891011121314151617181920212223242526
parse_service函数只是搭建了一个service的架子,具体的内容尚需由后面的解析函数来填充。来看service的另外一个解析函数parse_line_service。
了解parse_line_service
parse_line_service的代码如下所示:
parser.c
static void parse_line_service(structparse_state *state, int nargs, char **args)
{
struct service *svc = state->context;
struct command *cmd;
int i,kw, kw_nargs;
......
svc->ioprio_class = IoSchedClass_NONE;
//其实还是根据关键字来做各种处理。
kw =lookup_keyword(args[0]);
switch(kw) {
case K_capability:
break;
case K_class:
if(nargs != 2) {
......
}else {
svc->classname = args[1];
}
break;
......
case K_oneshot:
/*
这是service的属性,它一共有五个属性,分别为:
SVC_DISABLED:不随class自动启动。下面将会看到class的作用。
SVC_ONESHOT:退出后不需要重启,也就是这个service只启动一次就可以了。
SVC_RUNNING:正在运行,这是service的状态。
SVC_RESTARTING:等待重启,这也是service的状态。
SVC_CONSOLE:该service需要使用控制台 。
SVC_CRITICAL:如果在规定时间内该service不断重启,则系统会重启并进入恢复模式。
zygote没有使用任何属性,这表明它:会随着class的处理自动启动;
退出后会由init重启;不使用控制台;即使不断重启也不会导致系统进入恢复模式。
*/
svc->flags |= SVC_ONESHOT;
break;
case K_onrestart: //根据onrestart的内容,填充action结构体的内容
nargs--;
args++;
kw= lookup_keyword(args[0]);
......
//创建command结构体
cmd = malloc(sizeof(*cmd) + sizeof(char*) * nargs);
cmd->func = kw_func(kw);
cmd->nargs = nargs;
memcpy(cmd->args, args, sizeof(char*) * nargs);
//把新建的command加入到双向链表中。
list_add_tail(&svc->onrestart.commands, &cmd->clist);
break;
......
case K_socket: { //创建socket相关信息
struct socketinfo *si;
......
si= calloc(1, sizeof(*si));
if(!si) {
parse_error(state, "out of memory\n");
break;
}
si->name = args[1]; //socket的名字
si->type = args[2]; //socket的类型
si->perm = strtoul(args[3], 0, 8); //socket的读写权限
if(nargs > 4)
si->uid = decode_uid(args[4]);
if(nargs > 5)
si->gid = decode_uid(args[5]);
si->next = svc->sockets;
svc->sockets = si;
break;
}
......
default:
parse_error(state, "invalid option '%s'\n", args[0]);
}
}
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172
parse_line_service将根据配置文件的内容填充service结构体,那么,zygote解析完后会得到什么呢?图3-1表示了zygote解析后的结果:
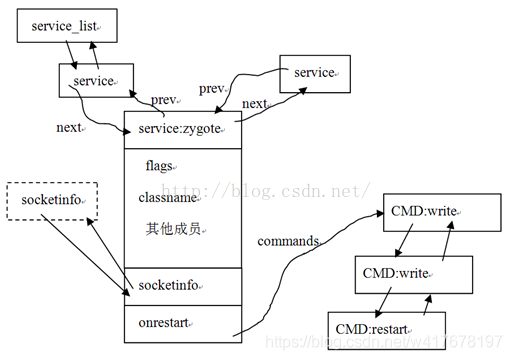
图3-1 zygote解析结果示意图
从上图中可知:
- service_list链表将解析后的service全部链接到了一起,并且是一个双向链表,前向节点用prev表示,后向节点用next表示。
- socketinfo也是一个双向链表,因为zygote只有一个socket,所以画了一个虚框socket做为链表的示范。
- onrestart通过commands指向一个commands链表,zygote有三个commands。
zygote这个service解析完了,现在就是“万事俱备,只欠东风”了。接下来要了解的是,init是如何控制service的。
init控制service
先看service是如何启动的。
启动zygote
init.rc中有这样一句话:
#class_start是一个COMMAND,对应的函数为do_class_start,很重要,切记。
class_start default
12
class_start标示一个COMMAND,对应的处理函数为do_class_start,它位于boot section的范围内。为什么说它很重要呢?
还记得init进程中的四个执行阶段吗?当init进程执行到下面几句话时,do_class_start就会被执行了。
//将bootsection节的command加入到执行队列
action_for_each_trigger("boot",action_add_queue_tail);
//执行队列里的命令,class可是一个COMMAND,所以它对应的do_class_start会被执行。
drain_action_queue();
1234
下面来看do_class_start函数:
builtins.c
int do_class_start(int nargs, char **args)
{
/*
args为do_class_start的参数,init.rc中只有一个参数,就是default。
下面这个函数将从service_list中寻找classname为”default”的service,然后
调用service_start_if_not_disabled函数。现在读者明白了service结构体中
classname的作用了吗?
*/
service_for_each_class(args[1],service_start_if_not_disabled);
return 0;
}
1234567891011
我们已经知道,zygote这个service的classname的值就是“default”,所以会针对这个service调用service_start_if_not_disabled,这个函数的代码是:
parser.c
static void service_start_if_not_disabled(struct service *svc)
{
if (!(svc->flags & SVC_DISABLED)) {
service_start(svc,NULL); //zygote可没有设置SVC_DISABLED
}
}
123456
service_start函数的代码如下所示:
init.c
void service_start(struct service *svc, constchar *dynamic_args)
{
struct stat s;
pid_t pid;
int needs_console;
int n;
svc->flags &= (~(SVC_DISABLED|SVC_RESTARTING));
svc->time_started = 0;
if(svc->flags & SVC_RUNNING) {
return;//如果这个service已在运行,则不用处理
}
/*
service一般运行于另外一个进程中,这个进程也是init的子进程,所以启动service前需要判断
对应的可执行文件是否存在,zygote对应的可执行文件是/system/bin/app_process
*/
if(stat(svc->args[0], &s) != 0) {
svc->flags |= SVC_DISABLED;
return;
}
......
pid =fork(); //调用fork创建子进程
if(pid == 0) {
//pid为零,我们在子进程中
struct socketinfo *si;
struct svcenvinfo *ei;
char tmp[32];
int fd, sz;
//得到属性存储空间的信息并加到环境变量中,后面在属性服务一节中会碰到使用它的地方。
get_property_workspace(&fd, &sz);
add_environment("ANDROID_PROPERTY_WORKSPACE", tmp);
//添加环境变量信息
for (ei = svc->envvars; ei; ei = ei->next)
add_environment(ei->name, ei->value);
//根据socketinfo创建socket
for (si = svc->sockets; si; si = si->next) {
int s = create_socket(si->name,
!strcmp(si->type,"dgram") ?
SOCK_DGRAM :SOCK_STREAM,
si->perm,si->uid, si->gid);
if (s >= 0) {
//在环境变量中添加socket信息。
publish_socket(si->name, s);
}
}
......//设置uid,gid等
setpgid(0, getpid());
if(!dynamic_args) {
/*
执行/system/bin/app_process,这样就进入到app_process的main函数中了。
fork、execve这两个函数都是Linux系统上常用的系统调用。
*/
if (execve(svc->args[0], (char**)svc->args, (char**) ENV) < 0) {
......
}
} else {
......
}
......//父进程init的处理,设置service的信息,如启动时间、进程号,以及状态等。
svc->time_started = gettime();
svc->pid = pid;
svc->flags |= SVC_RUNNING;
//每一个service都有一个属性,zygote的属性为init.svc.zygote,现在设置它的值为running
notify_service_state(svc->name, "running");
}
1234567891011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556575859606162636465666768
原来,zygote是通过fork和execv共同创建的!但service结构中的那个onrestart好像没有派上用场,原因何在?
重启zygote
根据名字,就可猜到onrestart应该是在zygote重启时用的。下面先看在zygote死后,它的父进程init会有什么动作:
init.c
static void sigchld_handler(int s)
{ //当子进程退出时,init的这个信号处理函数会被调用
write(signal_fd, &s, 1); //往signal_fd write数据
}
1234
signal_fd,就是在init中通过socketpair创建的两个socket中的一个,既然会往这个signal_fd中发送数据,那么另外一个socket就一定能接收到,这样就会导致init从poll函数中返回:
init.rc::main函数代码片断
nr =poll(ufds, fd_count, timeout);
......
if(ufds[2].revents == POLLIN) {
read(signal_recv_fd, tmp, sizeof(tmp));
while (!wait_for_one_process(0))//调用wait_for_one_process函数处理
;
continue;
}
......
//直接看这个wait_for_one_process函数:
static int wait_for_one_process(int block)
{
pid_t pid;
int status;
struct service *svc;
struct socketinfo *si;
time_t now;
struct listnode *node;
struct command *cmd;
while( (pid = waitpid(-1, &status, block ? 0 : WNOHANG)) == -1 && errno == EINTR );
if(pid <= 0) return -1;
//找到死掉的那个service,现在应该找到了代表zygote的那个service。
svc = service_find_by_pid(pid);
......
if(!(svc->flags & SVC_ONESHOT)) {
//杀掉zygote创建的所有子进程,这就是zygote死后,Java世界崩溃的原因。
kill(-pid, SIGKILL);
}
//清理socket信息,不清楚的读者可以通过命令man 7 AF_UNIX查询一下相关知识。
for(si = svc->sockets; si; si = si->next) {
char tmp[128];
snprintf(tmp, sizeof(tmp), ANDROID_SOCKET_DIR"/%s",si->name);
unlink(tmp);
}
svc->pid = 0;
svc->flags &= (~SVC_RUNNING);
if(svc->flags & SVC_ONESHOT) {
svc->flags |= SVC_DISABLED;
}
......
now = gettime();
/*
如果设置了SVC_CRITICAL标示,则4分钟内该服务重启次数不能超过4次,否则
机器会重启进入recovery模式。根据init.rc的配置,只有servicemanager进程
享有此种待遇。
*/
if(svc->flags & SVC_CRITICAL) {
if(svc->time_crashed + CRITICAL_CRASH_WINDOW >= now) {
if (++svc->nr_crashed > CRITICAL_CRASH_THRESHOLD) {
......
sync();
__reboot(LINUX_REBOOT_MAGIC1,LINUX_REBOOT_MAGIC2,
LINUX_REBOOT_CMD_RESTART2, "recovery");
return 0;
}
} else {
svc->time_crashed = now;
svc->nr_crashed = 1;
}
}
svc->flags |= SVC_RESTARTING;
//设置标示为SVC_RESTARTING,然后执行该service onrestart中的COMMAND,这些内容就
//非常简单了,读者可以自行学习。
list_for_each(node, &svc->onrestart.commands) {
cmd = node_to_item(node, struct command, clist);
cmd->func(cmd->nargs, cmd->args);
}
//设置init.svc.zygote的值为restarting。
notify_service_state(svc->name, "restarting");
return 0;
}
1234567891011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556575859606162636465666768697071727374757677
通过上面的代码,可知道onrestart的作用了,但zygote本身又在哪里重启的呢?答案就在下面的代码中:
init.c::main函数代码片断
for(;;) {
int nr, i, timeout = -1;
for (i = 0; i < fd_count; i++)
ufds[i].revents = 0;
drain_action_queue(); //poll函数返回后,会进入下一轮的循环
restart_processes(); //这里会重启所有flag标志为SVC_RESTARTING的service。
......
}
12345678
这样,zygote又回来了!
属性服务
我们知道,Windows平台上有一个叫注册表的东西。注册表可以存储一些类似key/value的键值对。一般而言,系统或某些应用程序会把自己的一些属性存储在注册表中,即使下次系统重启或应用程序重启,它还能够根据之前在注册表中设置的属性,进行相应的初始化工作。Android平台也提供了一个类型机制,可称之为属性服务(property service)。应用程序可通过这个属性机制,查询或设置属性。读者可以用adb shell登录到真机或模拟器上,然后用getprop命令查看当前系统中有哪些属性。即如我的HTC G7测试结果,如图3-2所示:(图中只显示了部分属性)
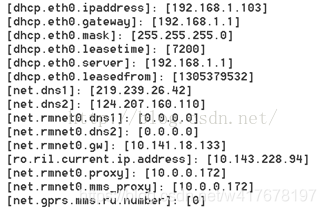
图3-2 HTC G7属性示意图
这个属性服务是怎么实现的呢?下面来看代码,其中与init.c和属性服务有关的代码有下面两行:
property_init();
property_set_fd = start_property_service();
12
分别来看看它们。
属性服务初始化
(1)创建存储空间 先看property_init函数,代码如下所示:
property_service.c
void property_init(void)
{
init_property_area();//初始化属性存储区域
//加载default.prop文件
load_properties_from_file(PROP_PATH_RAMDISK_DEFAULT);
}
123456
在properyty_init函数中,先调用init_property_area函数,创建一块用于存储属性的存储区域,然后加载default.prop文件中的内容。再看init_property_area是如何工作的,它的代码如下所示:
property_service.c
static int init_property_area(void)
{
prop_area *pa;
if(pa_info_array)
return -1;
/*
初始化存储空间,PA_SIZE是这块存储空间的总大小,为32768字节,pa_workspace
为workspace类型的结构体,下面是它的定义:
typedef struct {
void *data; //存储空间的起始地址
size_tsize; //存储空间的大小
int fd; //共享内存的文件描述符
} workspace;
init_workspace函数调用Android系统提供的ashmem_create_region函数创建一块
共享内存。关于共享内存的知识我们在第7章会接触,这里,只需把它当做一块普通的内存就
可以了。
*/
if(init_workspace(&pa_workspace, PA_SIZE))
return -1;
fcntl(pa_workspace.fd, F_SETFD, FD_CLOEXEC);
//在32768个字节的存储空间中,有PA_INFO_START(1024)个字节用来存储头部信息
pa_info_array = (void*) (((char*) pa_workspace.data) + PA_INFO_START);
pa = pa_workspace.data;
memset(pa, 0, PA_SIZE);
pa->magic = PROP_AREA_MAGIC;
pa->version = PROP_AREA_VERSION;
//__system_property_area__这个变量由bionic libc库输出,有什么用呢?
__system_property_area__ = pa;
return0;
}
12345678910111213141516171819202122232425262728293031323334
上面的内容比较简单,不过最后的赋值语句可是大有来头。system_property_area是bionic libc库中输出的一个变量,为什么这里要给它赋值呢?
原来,虽然属性区域是由init进程创建,但Android系统希望其他进程也能读取这块内存里的东西。为做到这一点,它便做了以下两项工作:
- 把属性区域创建在共享内存上,而共享内存是可以跨进程的。这一点,已经在上面的代码中见到了,init_workspace函数内部将创建这个共享内存。
- 如何让其他进程知道这个共享内存呢?Android利用了gcc的constructor属性,这个属性指明了一个libc_prenit函数,当bionic libc库被加载时,将自动调用这个libc_prenit,这个函数内部就将完成共享内存到本地进程的映射工作。
(2)客户端进程获取存储空间 关于上面的内容,来看相关代码:
libc_init_dynamic.c
//constructor属性指示加载器加载该库后,首先调用__libc_prenit函数。这一点和Windows上
//动态库的DllMain函数类似
void __attribute__((constructor))__libc_prenit(void);
void __libc_prenit(void)
{
......
__libc_init_common(elfdata); //调用这个函数
......
}
123456789
__libc_init_common函数为:
libc_init_common.c
void __libc_init_common(uintptr_t *elfdata)
{
......
__system_properties_init();//初始化客户端的属性存储区域
}
12345
system_properties.c
int __system_properties_init(void)
{
prop_area *pa;
int s,fd;
unsigned sz;
char *env;
.....
//还记得在启动zygote一节中提到的添加环境变量的地方吗?属性存储区域的相关信息
//就是在那儿添加的,这里需要取出来使用了。
env = getenv("ANDROID_PROPERTY_WORKSPACE");
//取出属性存储区域的文件描述符。关于共享内存的知识,第7章中将会进行介绍。
fd = atoi(env);
env = strchr(env, ',');
if (!env) {
return -1;
}
sz = atoi(env + 1);
//映射init创建的那块内存到本地进程空间,这样本地进程就可以使用这块共享内存了。
//注意,映射的时候指定了PROT_READ属性,所以客户端进程只能读属性,而不能设置属性。
pa = mmap(0, sz, PROT_READ, MAP_SHARED, fd, 0);
if (pa == MAP_FAILED) {
return -1;
}
if((pa->magic != PROP_AREA_MAGIC) || (pa->version !=PROP_AREA_VERSION)) {
munmap(pa, sz);
return -1;
}
__system_property_area__ = pa;
return 0;
}
1234567891011121314151617181920212223242526272829303132
上面代码中很多地方和共享内存有关,在第7章中会对与共享内存有关问题进行介绍,读者也可先行学习有关共享内存的知识。
总之,通过这种方式,客户端进程可以直接读取属性空间,但没有权限设置属性。客户端进程又是如何设置属性呢?
启动属性服务器
(1)启动属性服务器 init进程会启动一个属性服务器,而客户端只能通过和属性服务器交互才能设置属性。先来看属性服务器的内容,它由start_property_service函数启动,代码如下所示:
Property_servie.c
int start_property_service(void)
{
int fd;
/*
加载属性文件,其实就是解析这些文件中的属性,然后把它设置到属性空间中去。Android系统
一共提供了四个存储属性的文件,它们分别是:
#definePROP_PATH_RAMDISK_DEFAULT "/default.prop"
#define PROP_PATH_SYSTEM_BUILD "/system/build.prop"
#define PROP_PATH_SYSTEM_DEFAULT "/system/default.prop"
#define PROP_PATH_LOCAL_OVERRIDE "/data/local.prop"
*/
load_properties_from_file(PROP_PATH_SYSTEM_BUILD);
load_properties_from_file(PROP_PATH_SYSTEM_DEFAULT);
load_properties_from_file(PROP_PATH_LOCAL_OVERRIDE);
//有一些属性是需要保存到永久介质上的,这些属性文件则由下面这个函数加载,这些文件
//存储在/data/property目录下,并且这些文件的文件名必须以persist.开头。这个函数
//很简单,读者可自行研究。
load_persistent_properties();
//创建一个socket,用于IPC通信。
fd = create_socket(PROP_SERVICE_NAME, SOCK_STREAM, 0666, 0, 0);
if( fd< 0) return -1;
fcntl(fd, F_SETFD, FD_CLOEXEC);
fcntl(fd, F_SETFL, O_NONBLOCK);
listen(fd, 8);
return fd;
}
123456789101112131415161718192021222324252627282930
属性服务创建了一个用来接收请求的socket,可这个请求在哪里被处理呢?事实上,在init中的for循环那里已经进行相关处理了。
(2)处理设置属性请求 接收请求的地方是在init进程中,代码如下所示:
init.c::main函数片断
if (ufds[1].revents == POLLIN)
handle_property_set_fd(property_set_fd);
12
当属性服务器收到客户端请求时,init会调用handle_property_set_fd进行处理。这个函数的代码如下所示:
property_service.c
void handle_property_set_fd(int fd)
{
prop_msg msg;
int s;
int r;
int res;
struct ucred cr;
struct sockaddr_un addr;
socklen_t addr_size = sizeof(addr);
socklen_t cr_size = sizeof(cr);
//先接收TCP连接
if ((s= accept(fd, (struct sockaddr *) &addr, &addr_size)) < 0) {
return;
}
//取出客户端进程的权限等属性。
if(getsockopt(s, SOL_SOCKET, SO_PEERCRED, &cr, &cr_size) < 0) {
......
return;
}
//接收请求数据
r = recv(s,&msg, sizeof(msg), 0);
close(s);
......
switch(msg.cmd) {
case PROP_MSG_SETPROP:
msg.name[PROP_NAME_MAX-1] = 0;
msg.value[PROP_VALUE_MAX-1] = 0;
/*
如果是ctl开头的消息,则认为是控制消息,控制消息用来执行一些命令,例如用
adb shell登录后,输入setprop ctl.start bootanim就可以查看开机动画了,
关闭的话就输入setpropctl.stop bootanim,是不是很有意思呢?
*/
if(memcmp(msg.name,"ctl.",4) == 0) {
if (check_control_perms(msg.value, cr.uid, cr.gid)) {
handle_control_message((char*) msg.name + 4, (char*) msg.value);
}
......
}else {
//检查客户端进程是否有足够的权限
if (check_perms(msg.name, cr.uid, cr.gid)) {
//然后调用property_set设置。
property_set((char*) msg.name, (char*) msg.value);
}
......
}
break;
default:
break;
}
}
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051
当客户端的权限满足要求时,init就调用property_set进行相关处理,这个函数比较简单,代码如下所示:
property_service.c
int property_set(const char *name, const char*value)
{
prop_area *pa;
prop_info *pi;
int namelen = strlen(name);
int valuelen = strlen(value);
......
//从属性存储空间中寻找是否已经存在该属性
pi = (prop_info*) __system_property_find(name);
if(pi!= 0) {
//如果属性名以ro.开头,则表示是只读的,不能设置,所以直接返回。
if(!strncmp(name, "ro.", 3)) return -1;
pa = __system_property_area__;
//更新该属性的值
update_prop_info(pi, value, valuelen);
pa->serial++;
__futex_wake(&pa->serial, INT32_MAX);
}else {
//如果没有找到对应的属性,则认为是增加属性,所以需要新创建一项。注意,Android支持
//最多247项属性,如果目前属性的存储空间中已经有247项,则直接返回。
pa = __system_property_area__;
if(pa->count == PA_COUNT_MAX) return -1;
pi = pa_info_array + pa->count;
pi->serial = (valuelen << 24);
memcpy(pi->name, name, namelen + 1);
memcpy(pi->value, value, valuelen +1);
pa->toc[pa->count] =
(namelen << 24) | (((unsigned) pi) - ((unsigned) pa));
pa->count++;
pa->serial++;
__futex_wake(&pa->serial, INT32_MAX);
}
//有一些特殊的属性需要特殊处理,这里,主要是以net.change开头的属性。
if(strncmp("net.", name, strlen("net.")) == 0) {
if(strcmp("net.change", name) == 0) {
return 0;
}
property_set("net.change", name);
} elseif (persistent_properties_loaded &&
strncmp("persist.", name,strlen("persist.")) == 0) {
//如果属性名以persist.开头,则需要把这些值写到对应文件中去。
write_persistent_property(name, value);
}
/*
还记得init.rc中的下面这句话吗?
on property:persist.service.adb.enable=1
startadbd
当persist.service.adb.enable属性置为1后,就会执行start adbd这个command,
这是通过property_changed函数来完成的,它非常简单,读者可以自己阅读。
*/
property_changed(name, value);
return 0;
}
12345678910111213141516171819202122232425262728293031323334353637383940414243444546474849505152535455565758
好,属性服务端的工作已经了解了,下面看客户端是如何设置属性的。
(3)客户端发送请求 客户端通过property_set发送请求,property_set由libcutils库提供,代码如下所示:
properties.c
int property_set(const char *key, const char*value)
{
prop_msg msg;
unsigned resp;
......
msg.cmd = PROP_MSG_SETPROP;//设置消息码为PROP_MSG_SETPROP。
strcpy((char*) msg.name, key);
strcpy((char*) msg.value, value);
//发送请求
returnsend_prop_msg(&msg);
}
static int send_prop_msg(prop_msg *msg)
{
int s;
int r;
//建立和属性服务器的socket连接
s = socket_local_client(PROP_SERVICE_NAME,
ANDROID_SOCKET_NAMESPACE_RESERVED,
SOCK_STREAM);
if(s < 0) return -1;
//通过socket发送出去
while((r = send(s, msg, sizeof(prop_msg), 0)) < 0) {
if((errno == EINTR) || (errno == EAGAIN)) continue;
break;
}
if(r == sizeof(prop_msg)) {
r = 0;
} else{
r = -1;
}
close(s);
return r;
}
12345678910111213141516171819202122232425262728293031323334353637
至此,属性服务器就介绍完了。总体来说,还算比较简单。
小结
本章讲解了init进程如何解析zygote,以及属性服务器的工作原理,旨在帮助读者认识这个天字号第一进程。从整体来说,init.rc的解析难度相对最大。相信读者通过以上实例分析,已经理解了init.rc的解析原理。另外,inti涉及很多和Linux系统相关的知识,有兴趣的读者可以自行研究。

车机资料推荐:《车载开发技术手册》
zygote概述
Zygote本身是一个NATIVE层的应用程序,与驱动、内核无关。前面已经介绍过了,zygote由init进程根据init.rc配置文件创建。其实本质上来说,zygote就是app_process,这个名字在android.mk中指定,但是在运行的时候,app_process通过LINUX下的pctrl系统调用将自己的名字换成了“zygote”,所以通过ps命令就可以看到进程的名字为zygote。
Zygote的进程的主要作用只有两个:
- 启动SystemServer进程。SystemServer是一个用于启动手机内部各种服务的进程,我们常说的PMS,AMS等都是由SystemServer所启动。
- 在系统运行过程中,即时的去孵化APP进程,也就是我们每次点击APP图标启动的APP的时候,zygote就开始运作了。
关于孵化:
Zygote进程创建别的进程的时候,用的不是创建,而是孵化这个词,那怎么理解孵化这个意思呢?
- 我们Android系统的程序,都是基于虚拟机所启动的,如果我们每次启动一个APP都要新启动一个虚拟机,那未免也太卡太慢了。所以为了避免这种场景,zygote进程在启动的时候,就会直接预加载虚拟机所需要的内存等资源,等后面创建应用需要用到的时候,直接共享使用,这样就避免了多次启动虚拟机的情况。
- zygote进程在创建进程的时候,最后会调到Linux内核自带的的fork方法,来复制一个子进程,从而达到1所说的共享虚拟机内容的情况。
- zygote进程的作用,就是生成别的进程,自己是不负责做事的。
关于fork:
fork在zygote进程中是一个很重要的概念,这是Linux内核自带的一个方法,这个方法的作用就是复制一个子进程。那么,怎么理解这个复制的意思,简单来说,就是从成员变量,到内存空间,再到当前所执行的代码指令,都会生成一个副本后放到子进程中。
当进程A调用fork后,进程A和复制的子进程B,都会得到fork方法的return值,并且继续往下执行。 返回值: 若成功调用一次则返回两个值,子进程返回0,父进程返回子进程ID;否则,出错返回-1
进程A在开辟一块内存空间之后,持有这个内存空间的引用的话,在fork之后,子进程B也会持有这个内存空间。
fork进程源码解析
Native层启动Zygote进程
由于也不怎么做C语言的开发工作,这部分就快速略过,简单来说就是init进程在读取init.rc文件之后,根据文件里面的指令:
- 启动了虚拟机。
- 注册了JNI(Java Native Interface,也就是我们常看见的那些native方法啥的)。
- 启动了Zygote进程,具体启动方式就是通过反射,拿到ZygoteInit.java这个类,然后去调用里面的main方法。
启动SystemServer
我还是先搬出我的时序图,对这个启动过程先做一个总结。
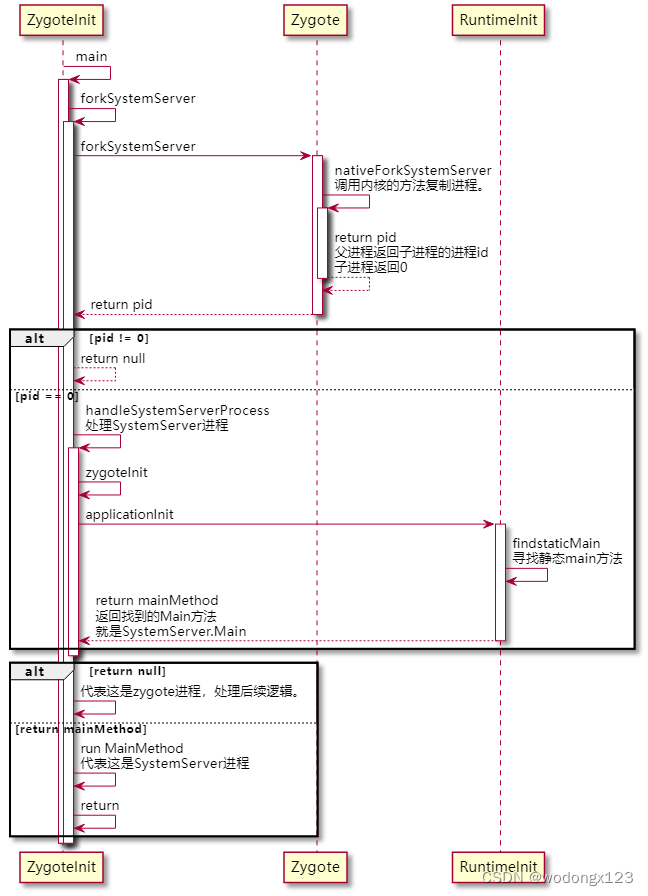
fork生成SystemServer进程
public class ZygoteInit {
public static void main(String argv[]) {
// 省略了无关代码
if (startSystemServer) {
Runnable r = forkSystemServer(abiList, zygoteSocketName, zygoteServer);
// 如果返回的值不为空,就代表当前处于子进程,执行子进程找到的main方法
if (r != null) {
r.run();
return;
}
}
}
private static Runnable forkSystemServer(String abiList, String socketName,
ZygoteServer zygoteServer) {
// 省略了无关代码
int pid;
/* fork生成SystemServer进程 */
pid = Zygote.forkSystemServer(
parsedArgs.mUid, parsedArgs.mGid,
parsedArgs.mGids,
parsedArgs.mRuntimeFlags,
null,
parsedArgs.mPermittedCapabilities,
parsedArgs.mEffectiveCapabilities);
// 0表示当前是子进程,也就是SystemServer进程
if (pid == 0) {
if (hasSecondZygote(abiList)) {
waitForSecondaryZygote(socketName);
}
zygoteServer.closeServerSocket();
return handleSystemServerProcess(parsedArgs);
}
// 非0表示当前是父进程,也就是Zygote进程
return null;
}
}
public class Zygote {
static int forkSystemServer(int uid, int gid, int[] gids, int runtimeFlags,
int[][] rlimits, long permittedCapabilities, long effectiveCapabilities) {
ZygoteHooks.preFork();
int pid = nativeForkSystemServer(
uid, gid, gids, runtimeFlags, rlimits,
permittedCapabilities, effectiveCapabilities);
// Set the Java Language thread priority to the default value for new apps.
Thread.currentThread().setPriority(Thread.NORM_PRIORITY);
ZygoteHooks.postForkCommon();
return pid;
}
/** 最后是调用了内核的fork方法来复制进程 */
private static native int nativeForkSystemServer(int uid, int gid, int[] gids, int runtimeFlags,
int[][] rlimits, long permittedCapabilities, long effectiveCapabilities);
}
这里就可以看出来,对于fork方法的基本处理,因为生成的进程和父进程唯一的区别就是return的值不一样,所以就根据这个return值来区分是父进程还是子进程,从而选择接下来要处理的逻辑。
SystemServer进程寻找main方法
从handleSystemServerProcess开始继续看。
public class ZygoteInit {
private static Runnable handleSystemServerProcess(ZygoteArguments parsedArgs) {
// 省略了无关代码
return ZygoteInit.zygoteInit(parsedArgs.mTargetSdkVersion,
parsedArgs.mDisabledCompatChanges,
parsedArgs.mRemainingArgs, cl);
}
public static final Runnable zygoteInit(int targetSdkVersion, long[] disabledCompatChanges,
String[] argv, ClassLoader classLoader) {
// 省略了无关代码
RuntimeInit.commonInit();
ZygoteInit.nativeZygoteInit();
return RuntimeInit.applicationInit(targetSdkVersion, disabledCompatChanges, argv,
classLoader);
}
}
public class RuntimeInit {
protected static Runnable applicationInit(int targetSdkVersion, long[] disabledCompatChanges,
String[] argv, ClassLoader classLoader) {
// 省略了无关代码
return findStaticMain(args.startClass, args.startArgs, classLoader);
}
/**
* 找到className中的静态main方法
* 其实就是用反射去找类中的这个方法而已
*/
protected static Runnable findStaticMain(String className, String[] argv,
ClassLoader classLoader) {
Class<?> cl;
try {
cl = Class.forName(className, true, classLoader);
} catch (ClassNotFoundException ex) {
throw new RuntimeException(
"Missing class when invoking static main " + className,
ex);
}
Method m;
try {
m = cl.getMethod("main", new Class[] { String[].class });
} catch (NoSuchMethodException ex) {
throw new RuntimeException(
"Missing static main on " + className, ex);
} catch (SecurityException ex) {
throw new RuntimeException(
"Problem getting static main on " + className, ex);
}
int modifiers = m.getModifiers();
if (! (Modifier.isStatic(modifiers) && Modifier.isPublic(modifiers))) {
throw new RuntimeException(
"Main method is not public and static on " + className);
}
/** 这个return的Runnable,最终会在ZygoteInit的main方法中被执行。*/
return new MethodAndArgsCaller(m, argv);
}
/** RuntimeInit中封装的Runnable,run方法就是去跑找到的method而已 */
static class MethodAndArgsCaller implements Runnable {
/** method to call */
private final Method mMethod;
/** argument array */
private final String[] mArgs;
public MethodAndArgsCaller(Method method, String[] args) {
mMethod = method;
mArgs = args;
}
public void run() {
try {
mMethod.invoke(null, new Object[] { mArgs });
} catch (IllegalAccessException ex) {
throw new RuntimeException(ex);
} catch (InvocationTargetException ex) {
Throwable cause = ex.getCause();
if (cause instanceof RuntimeException) {
throw (RuntimeException) cause;
} else if (cause instanceof Error) {
throw (Error) cause;
}
throw new RuntimeException(ex);
}
}
}
}
这段代码不难看出,SystemServer进程做的事,就是通过反射去找到SystemServer.java这个类的静态main方法去执行,同时将ZygoteInit的main方法给return了。
启动APP
启动APP主要是靠ZygoteServer类,这里还是先搬出时序图
看着有点小乱,主要是因为套了一个死循环方法。
class ZygoteInit {
public static void main(String argv[]) {
// 省略无关代码
ZygoteServer zygoteServer = null;
Runnable caller;
try {
zygoteServer = new ZygoteServer(isPrimaryZygote);
// SelcetLoop方法在fork之后的子进程中会return出一个caller
// SelectLoop方法会在Zygote进程中无限循环不停止。
caller = zygoteServer.runSelectLoop(abiList);
} catch (Throwable ex) {
Log.e(TAG, "System zygote died with exception", ex);
throw ex;
} finally {
if (zygoteServer != null) {
zygoteServer.closeServerSocket();
}
}
// 执行子进程中return出来的Runnable方法
if (caller != null) {
caller.run();
}
}
}
class ZygoteServer {
Runnable runSelectLoop(String abiList) {
// 省略无关代码
// 将SocketFD添加到列表头
ArrayList<FileDescriptor> socketFDs = new ArrayList<FileDescriptor>();
socketFDs.add(mZygoteSocket.getFileDescriptor());
while (true) {
StructPollfd[] pollFDs = null;
pollFDs = new StructPollfd[socketFDs.size()];
int pollIndex = 0;
for (FileDescriptor socketFD : socketFDs) {
pollFDs[pollIndex] = new StructPollfd();
pollFDs[pollIndex].fd = socketFD;
pollFDs[pollIndex].events = (short) POLLIN;
++pollIndex;
}
try {
// 等待文件描述符上的POLLIN事件,代码会阻塞在这里直到响应之后才继续往下执行
Os.poll(pollFDs, -1);
} catch (ErrnoException ex) {
throw new RuntimeException("poll failed", ex);
}
while (--pollIndex >= 0) {
// 如果没有实际发生的事件并不是可读事件就跳过该文件描述符
if ((pollFDs[pollIndex].revents & POLLIN) == 0) {
continue;
}
if (pollIndex == 0) {
// 创建一个连接
ZygoteConnection newPeer = acceptCommandPeer(abiList);
peers.add(newPeer);
socketFDs.add(newPeer.getFileDescriptor());
} else if (pollIndex < usapPoolEventFDIndex) {
try {
// 获取Zygote连接
ZygoteConnection connection = peers.get(pollIndex);
// 获取一个方法,实际上就是获取子进程的静态Main方法
final Runnable command = connection.processOneCommand(this);
// 成员变量,当fork完子进程的时候,子进程会将该变量设置为true
if (mIsForkChild) {
if (command == null) {
throw new IllegalStateException("command == null");
}
return command;
else {
//在主进程中关闭掉该连接
if (connection.isClosedByPeer()) {
connection.closeSocket();
peers.remove(pollIndex);
socketFDs.remove(pollIndex);
}
}
} catch (Exception e) { }
}
}
}
}
}
这个代码看着其实和Looper.loop非常相似,都是先阻塞在一个地方,等到响应之后才开始继续往下处理。
文件描述符FileDescriptor
在runSelectLoop这个方法里面,会出现FileDescriptor或者FD,这个东西是文件描述符,我把百科的话简单提炼介绍一下:
就是我们每个进程在运行的时候,在虚拟机底层都会有个表(一段连续的存储地址),这个表专门用于记录我们每次打开文件时的信息,包括目标文件的地址,应用层对文件所进行的操作等信息。
每次在对文件进行打开操作的时候,我们都可以获得该文件在这个文件表的下标。这个下标就叫做文件描述符,我们可以根据这个下标通过LINUX系统的API来操作或者监听那些曾经被打开过的文件。
OS.poll
OS.poll,让runSelectLoop阻塞的方法,这个方法的底层调用,就是调用linux系统的poll方法,具体功能为:
等待文件描述符上的某个事件,具体等待什么事件,根据设置决定,看一下StructPollfd 这个对象
public final class StructPollfd {
/** The file descriptor to poll. */
public FileDescriptor fd;
/**
* The events we're interested in. POLLIN corresponds to being in select(2)'s read fd set,
* POLLOUT to the write fd set.
*/
public short events;
/** The events that actually happened. */
public short revents;
}
其中,fd就代表了文件描述符,event代表了关注的事件,revent代表了实际发生的事件。
套入到我们的场景当中,我们等待的就是POLLIN这个事件,也就是可读事件。
创建连接
在if (pollIndex == 0) 中看一下如何创建一个连接,主要是acceptCommandPeer这个方法,所以就从这里看起
class ZygoteServer {
private ZygoteConnection acceptCommandPeer(String abiList) {
try {
// mZygoteSocket的类型为LocalServerSocket
return createNewConnection(mZygoteSocket.accept(), abiList);
} catch (IOException ex) {
throw new RuntimeException(
"IOException during accept()", ex);
}
}
protected ZygoteConnection createNewConnection(LocalSocket socket, String abiList)
throws IOException {
return new ZygoteConnection(socket, abiList);
}
}
public class LocalServerSocket implements Closeable {
private final LocalSocketImpl impl;
public LocalSocket accept() throws IOException
{
LocalSocketImpl acceptedImpl = new LocalSocketImpl();
impl.accept(acceptedImpl);
return LocalSocket.createLocalSocketForAccept(acceptedImpl);
}
}
class LocalSocketImpl {
protected void accept(LocalSocketImpl s) throws IOException {
if (fd == null) {
throw new IOException("socket not created");
}
try {
//重点就是这行Os.accept
s.fd = Os.accept(fd, null /* address */);
s.mFdCreatedInternally = true;
} catch (ErrnoException e) {
throw e.rethrowAsIOException();
}
}
}
最后核心的部分是,调用了Os.accept,这个方法的功能简单来说就是,当调用Os.accept后,就会根据参数的fd创建一个新的Socket连接,并返回该连接的FD。
启动一个新的进程流程
综合一下前面的内容,我们就可以总结出这个死循环总体的功能了
- 在一开始的时候,我们对mZygoteSocket的FD监听POLLIN事件(此时socketFDs 列表里面只有mZygoteSocket对象)。
- 另一个进程A通过ZygoteProcess.connect这个方法,来创建一个连接并发出消息(此时调用了Os.socket,创建Socket连接)。
- Os.poll触发,此时一定是触发if (pollIndex == 0) 的条件,然后创建一个新的Zygote连接(此时调用了Os.accept)。
- 进程A通过在Zygote.connect这个方法的流程中,调用LocalSocketlmpl.connectLocal方法,确认连接。
- 然后第二次监听POLLIN的时候,socketFDs里面就有mZygoteSocket和我们在刚刚创建的新连接。
- 此时触发的是else if (pollIndex < usapPoolEventFDIndex) ,去fork一个新的进程,并且找到对应的main方法运行,子进程就算创建完成了。
文章到这就是全部内容了,主要讲解车载里运用的Android AutoMotive内容的nit与zygote内核原理;车载资料参考《车载技术手册文档》
附:时序图代码
@startuml
participant ZygoteInit as init
participant Zygote as zygote
participant RuntimeInit as rinit
init -> init : main
activate init
init -> init : forkSystemServer
activate init
init -> zygote : forkSystemServer
activate zygote
zygote -> zygote : nativeForkSystemServer\n调用内核的方法复制进程。
activate zygote
zygote --> zygote : return pid\n父进程返回子进程的进程id\n子进程返回0
deactivate zygote
zygote --> init : return pid
deactivate zygote
alt pid != 0
init --> init :return null
else pid == 0
init -> init : handleSystemServerProcess\n处理SystemServer进程
activate init
init -> init : zygoteInit
init -> rinit : applicationInit
activate rinit
rinit -> rinit : findstaticMain\n寻找静态main方法
rinit --> init : return mainMethod\n返回找到的Main方法\n就是SystemServer.Main
deactivate rinit
end
deactivate init
alt return null
init -> init : 代表这是zygote进程,处理后续逻辑。
else return mainMethod
init -> init : run MainMethod\n代表这是SystemServer进程
init -> init : return
end
deactivate init
deactivate init
@enduml