本文代码使用
HAL库。
文章目录
- 前言
- 一、E18-D80NK 红外传感器:
- 1. E18-D80NK 的介绍
- 2. 电器特性
- 二、红外检测小实验代码讲解
- 三、实验现象
- 总结
前言
这篇文章介绍 如何使用 STM32 控制 E18-D80NK 进行红外检测。
一、E18-D80NK 红外传感器:
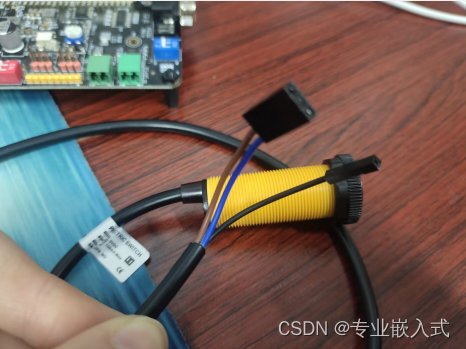
1. E18-D80NK 的介绍
E18-D8ONK 这是一种 集发射与接收于一体 的光电传感器,发射光经过调制后发出,接收头对反射光进行解调输出。有效的避免了可见光的干扰。透镜的使用,也使得这款传感器最远可以检测80厘米距离的问题(由于红外光的特性,不同颜色的物体,能探测的最大距离也有不同;白色物体最远,黑色物体最近)。

检测 障碍物的距离 可以根据要求通过 尾部的 电位器旋钮 进行调节。
该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点,可以广泛应用于机器人避障、流水线计件等众多场仓。.
2. 电器特性
- 棕色:VCC;蓝色:GND;黑色:OUT。
- 工作电压:5V。
- 检测距离:3-80cm。
- 工作原理:检测到目标物体时输出低电平,正常状态时输出高电平。
二、红外检测小实验代码讲解
本实验是 :使用 E18-D80NK 检测到有障碍物时,对检测到障碍物的次数进行计算。
大家可以使用 CubeMX 生成了 相关的引脚配置使能,我这里 是 没有使用这个软件,单独创建一个 test.c 文件 进行配置引脚使能的。
对于 单独创建的代码函数不理解的,可以参考我之前的文章详细介绍了这些函数:STM32CubeMX串口USART中断发送接收数据
我使用的板子是 STM32F103 ,OUT 端口接在了 PB1。
test.c :
#include "test.h"
static volatile uint8_t level = 1; /* 没有检测到返回高电平 1 */
uint8_t count= 0; /* 碰见物体次数 */
void Test_Reint(void) /* 引脚配置,使能 */
{
GPIO_InitTypeDef GPIO_InitStruct = {0}; /* 创建具体变量 */
__HAL_RCC_GPIOB_CLK_ENABLE(); /* 使能 */
/* 配置引脚 */
GPIO_InitStruct.Pin = GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING_FALLING; /* 双边沿触发中断 */
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); /* 完成初始化配置引脚 */
HAL_NVIC_SetPriority(EXTI1_IRQn, 0, 2); /* 设置优先级 */
HAL_NVIC_EnableIRQ(EXTI1_IRQn); /* 使能中断 */
}
/* 外部中断服务函数 */
void EXTI1_IRQHandler(void)
{
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_1);
}
/* 中断回调函数 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == GPIO_PIN_1)
{
level = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1); /* 读电平 */
if(level == 0) /* 有物体 0 */
{
level = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1); /* 读电平 */
count++;
}
}
}
int GetTime(void)
{
return count; /* 向 main.c 传递time 的值 */
}
main.c :
uint8_t date = 0; /* 物体次数 */
date = GetTime();
printf("number = %d\r\n",date);
三、实验现象
当 E18-D80NK 检测到有障碍物时,led 点亮,同时对检测到障碍物的次数进行计算。
实验现象
总结
这是本专栏的第一个小模块,后面会持续更新 其他的模块实验,希望大家多多支持啦。
有不理解的代码可以留言评论,也可以私聊。