感知系统架构
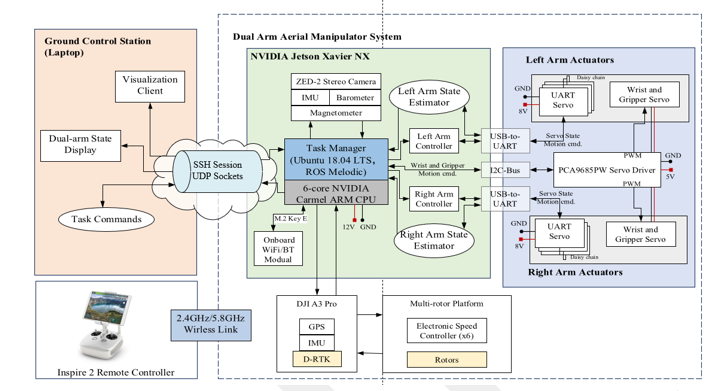
为满足天空端主控制器的诸如RGB-D图像处理等大容量数据吞吐、高速并行计算、实时运动控制以及通信和可视化任务的计算算力需求,同时优化功耗表现,采用了结构紧凑、功耗表现优异的边缘计算硬件NVIDA IJetson AGXOrin 。该开发者套件包含高性能、高能效的 Jetson AGX Orin 模组,算力高达 275 TOPS是上一代多个并发 AI 推理管道性能的 8 倍,运行于 NVIDIA AI 软件堆栈,广泛应用于图像处理、嵌入式控制、并行计算等场景,可以为机器人、制造、控制和电力等行业打造先进的机器人和边缘 AI 应用。系统架构如图所示。
2. Realsense2 D435i & USB Monocular
librealsense & realsense2_camera ROS package
安装SDK库:
librealsense: V2.50.0 + https://github.com/IntelRealSense/librealsense/releases/tag/v2.50.0
在/home下进入librealsense,并安装依赖项
cd librealsense
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev安装依赖:
安装依赖项和编译
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && udevadm trigger
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make
sudo make install测试安装结果
这时候可以连接摄像头了,输入以下命令查看结果
realsense-viewer 如果成功,可以看到点云图像
编译ROS PKG:
在工作空间src下克隆项目:
cd ~/catkin_ws/src
git clone https://github.com/IntelRealSense/realsense-ros.git
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
cd ~/catkin_ws && catkin_makeROS中测试
roslaunch realsense2_camera rs_camera.launch ERROR:undefined symbol: _ZN2cv3MatC1Ev【librealsense2_camera.so: undefined symbol: _ZN2cv3MatC1Ev】
https://github.com/IntelRealSense/realsense-ros/issues/2467
解决方法:
Now im testing this solution but it looks promising. (even work with -DFORCE_RSUSB_BACKEND:=false):
find_package( OpenCV REQUIRED )
include_directories(
include
${realsense2_INCLUDE_DIR}
${catkin_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
)
target_link_libraries(${PROJECT_NAME}
${realsense2_LIBRARY}
${catkin_LIBRARIES}
${CMAKE_THREAD_LIBS_INIT}
${OpenCV_LIBRARIES}
)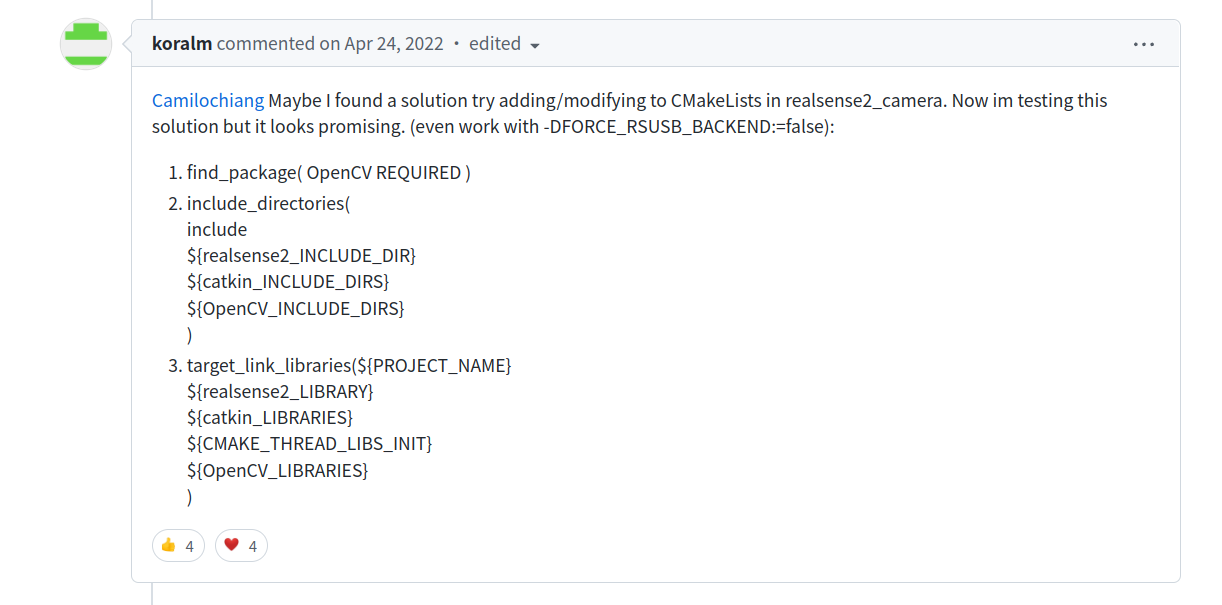
修改后重新编译,加参数 -DFORCE_RSUSB_BACKEND:=false
catkin_make install -DFORCE_RSUSB_BACKEND:=falseusb_cam ROS package
ROS.org usb_cam介绍http://wiki.ros.org/usb_cam
安装usb 相机驱动程序ROS功能包:
sudo apt-get install ros-melodic-usb-cam
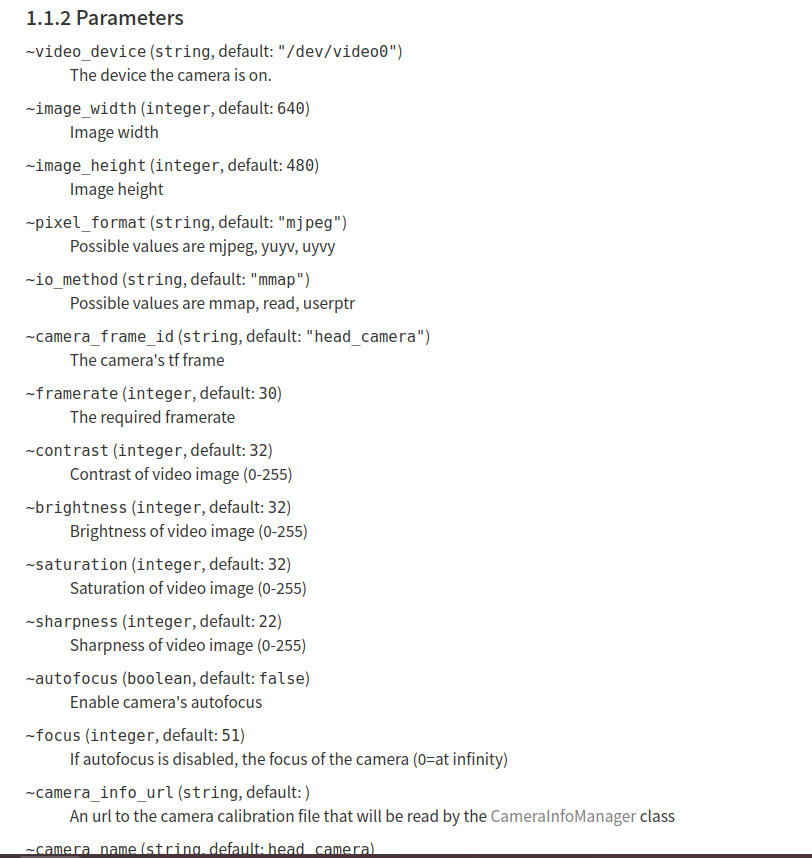
或sudo apt-get install ros-noetic-usb-cam参数表:
launch文件
<launch>
<!--Launch Usb Camera via usb_cam package -->
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/Monocular" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">
<remap from="image" to="/usb_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>RVIZ
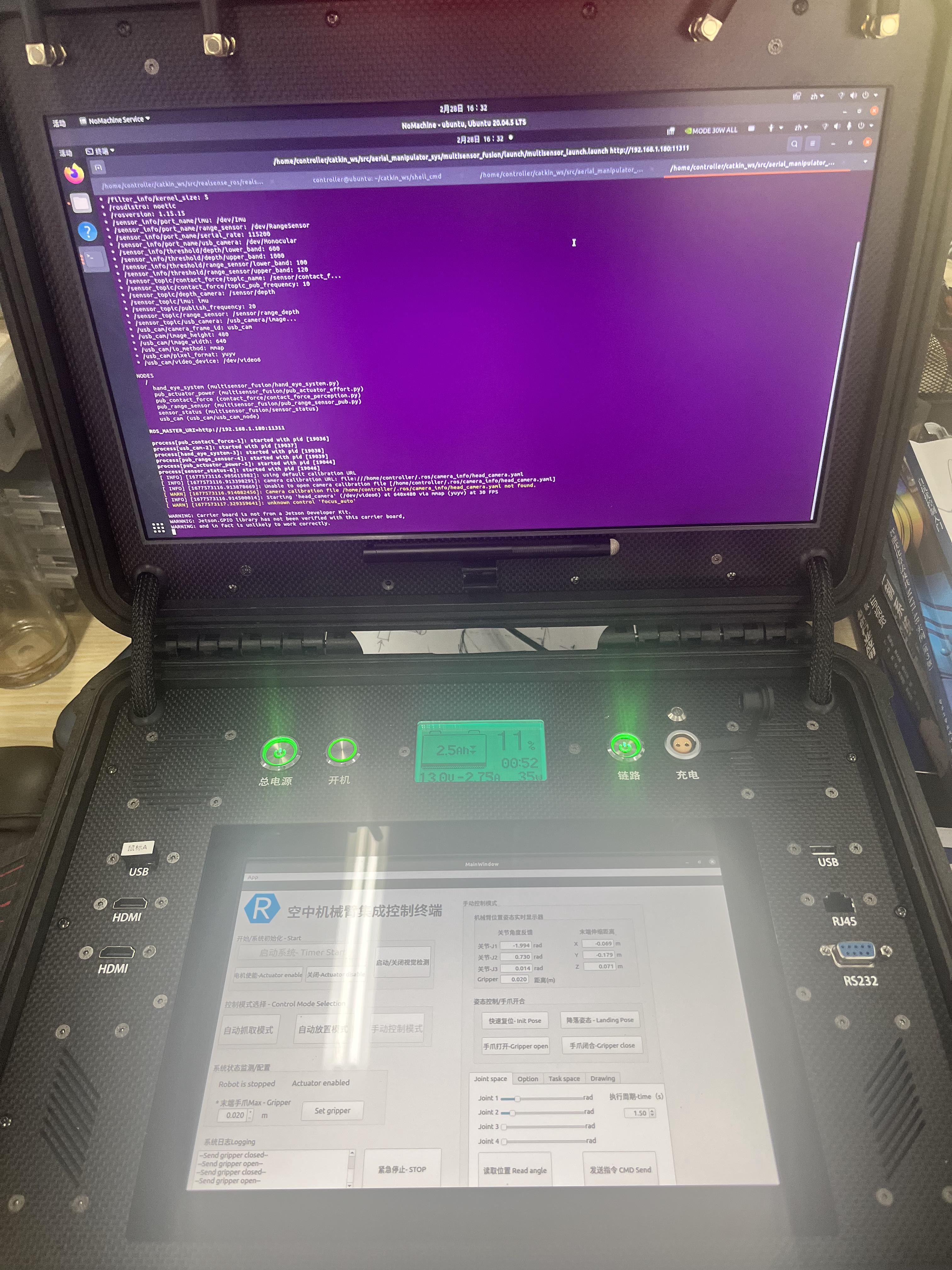
数据及图像可视化节点,实时显示目标检测结果和视觉传感器图像
<launch>
<!-- Launch Multi-sensor drivers and filters, with Lidar range sensor and Usb Camera -->
<!-- Loading param files -->
<rosparam file="$(find multisensor_fusion)/cfg/sensor_cfg.yaml" command="load" />
<!--<rosparam file="$(find multisensor_fusion)/cfg/ros_pkg_info.yaml" command="load" />-->
<!--Launch USB 2.0 Camera launch file -->
<include file="$(find contact_force)/launch/contact_force_launch.launch">
</include>
<include file="$(find multisensor_fusion)/launch/usb_camera_launch.launch">
</include>
<!-- Launch network state monitor and publisher node -->
<node
name="pub_range_sensor"
pkg="multisensor_fusion"
type="pub_range_sensor_pub.py" />
<node
name="pub_actuator_power"
pkg="multisensor_fusion"
type="pub_actuator_effort.py" />
<node
name="sensor_status"
pkg="multisensor_fusion"
type="sensor_status" />
<!-- Launch rivz display -->
<!--<node name="rviz" pkg="rviz" type="rviz" args="-d $(find dual_arm_robot_description)/rviz/dual_arm.rviz" output="screen" />-->
</launch>3.GUI &集成控制终端
通信架构
系统功能

![[架构之路-123]-《软考-系统架构设计师》-操作系统-2-操作系统原理 - 存储层次结构与存储管理(寄存器、Cache、MMU、内存、外存、页表)](https://img-blog.csdnimg.cn/img_convert/a8e24d9bdaaa34796153ad055953d35e.png)