近日,特斯拉或将在其HW4.0硬件系统配置一枚高精度4D毫米波雷达的消息在外网刷屏。据分析,“纯视觉”信仰者马斯克之所以做出这样的决定,一方面是减配了雷达的特斯拉自动驾驶,表现不尽如人意;另一方面也跟毫米波雷达的技术迭代有关。
马斯克曾表示:“如果有高分辨率的毫米波雷达,会比单纯视觉更好,但问题是这样的雷达并不存在”。但随着智能驾驶的火越烧越旺,各种智能环境感知技术正在加速“上车”。而产业链上不断被验证的4D毫米波雷达,看来已经能够符合马斯克的要求了。
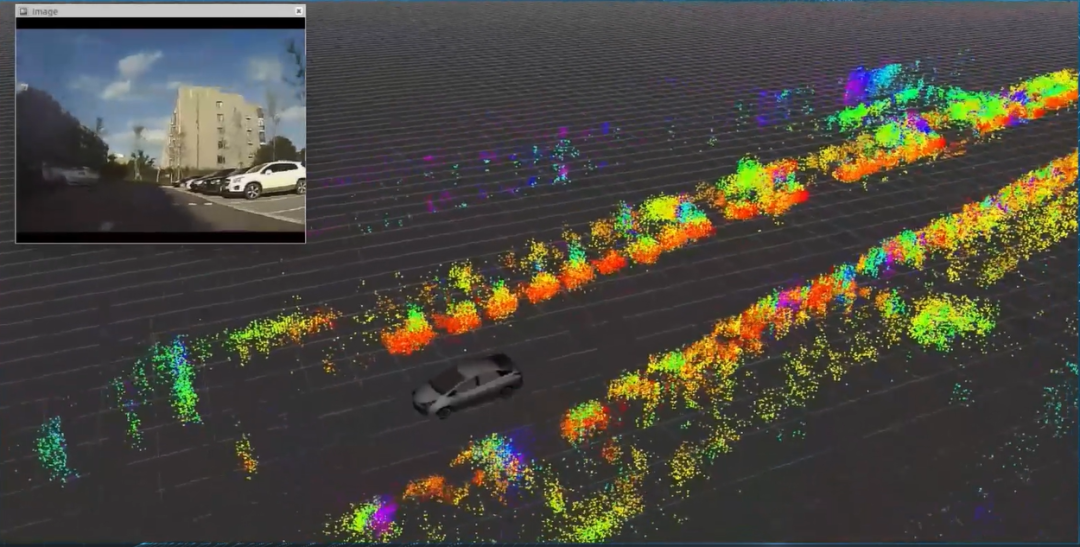
与传统的3D毫米波雷达相比,4D毫米波雷达具有更高的分辨率和更丰富的信息表达能力。它可以在三维空间中准确地定位、识别和跟踪多个目标,并提供这些目标的速度和方向信息,从而为智能车辆等设备提供更准确、更可靠的环境感知。
这波热潮下,已有一家国产企业“捷足先登”。近日,国内毫米波雷达智能系统解决方案头部服务商-木牛科技宣布完成了C轮数亿元融资,微光创投和劲邦资本联合领投,其他投资方还有仓廪投资、君茂资本、渤信资本、国海创新资本和翠湖基金。
木牛科技COO王卫表示,“伴随着整个智能驾驶和辅助驾驶赛道的起飞,毫米波雷达作为智能传感器的典型产品,正迎来爆发窗口期”。
01 并不止步于4D:毫米波雷达的迭代进击史
毫米波雷达的发展史,可以说是一个对目标感知维度不断进阶的过程。
3D毫米波雷达主要聚焦于二维空间的感知,即从水平维度上感知目标,仅可以探测到物体的二维水平坐标信息(距离、方位角)和相对速度,不具备探测高度的能力,这使得其很难判断前方静止的物体是在地面还是空中,因此在遇到立交桥、交通标牌之类的物体,往往无法准确判断是否需要预警。
为解决这一痛点,4D毫米波雷达增加了“目标高度”这一维度解析,通过提供更高密度、更高分辨率的点云信息,实现对于目标“3D+高度”四个维度的信息感知,从而适应更多复杂路况。以木牛科技2019年发布的全球首款4D成像雷达O-79 4D为例,它从提升主处理器性能、算法能力,到优化天线性能、数量和阵列排布等多个方面同时着手,优化多目标高精准的点云成像识别能力,以此解决了机械车辆制造商Bobcat(斗山山猫)在高粉尘、弱光线、障碍物繁杂等苛刻环境下安全智驾的感知难题,将80%的事故率降低到近乎为零。

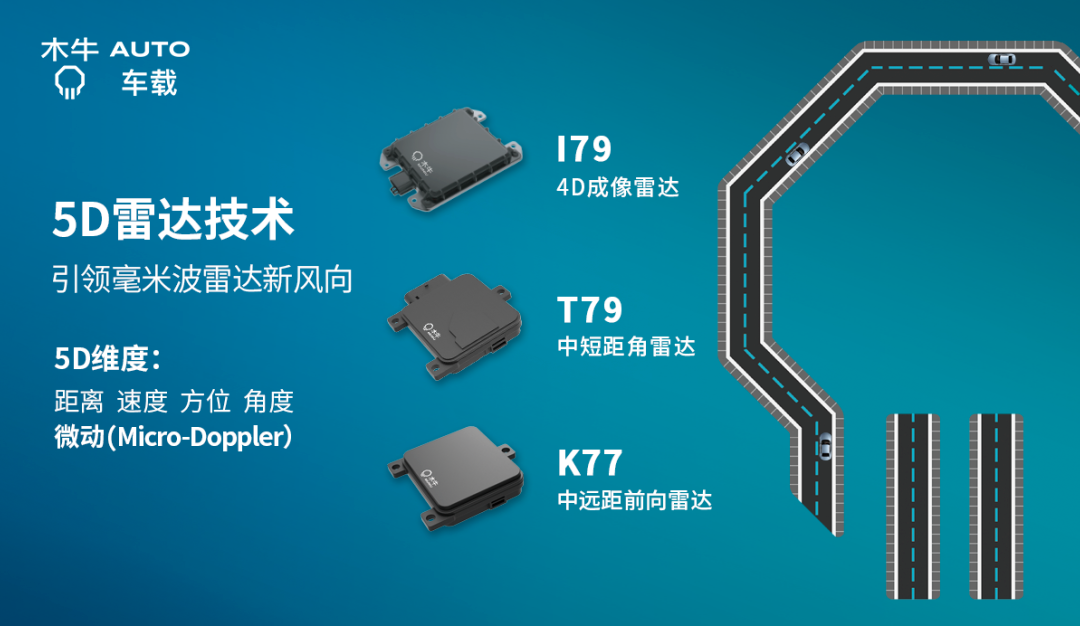
自动驾驶的高精度感知要求倒逼着毫米波雷达的精确度不断进化,尽管4D已经实现了较高的分辨率,但对于智能驾驶来说,精准感知永无止境。沿着这一方向,木牛科技又进一步提出了5D毫米波雷达技术方案。
5D毫米波雷达技术起源于木牛科技在智能体育市场中对高尔夫球的动态感知场景,相较于行驶车辆,高尔夫球的体积更小且运动轨迹更复杂,这对感知技术提出了更高的要求。为了更科学有效的提升高尔夫挥杆水平,除了球速、角度、方位、距离,还需要检测球体微小的旋转角度等16项精准数据。
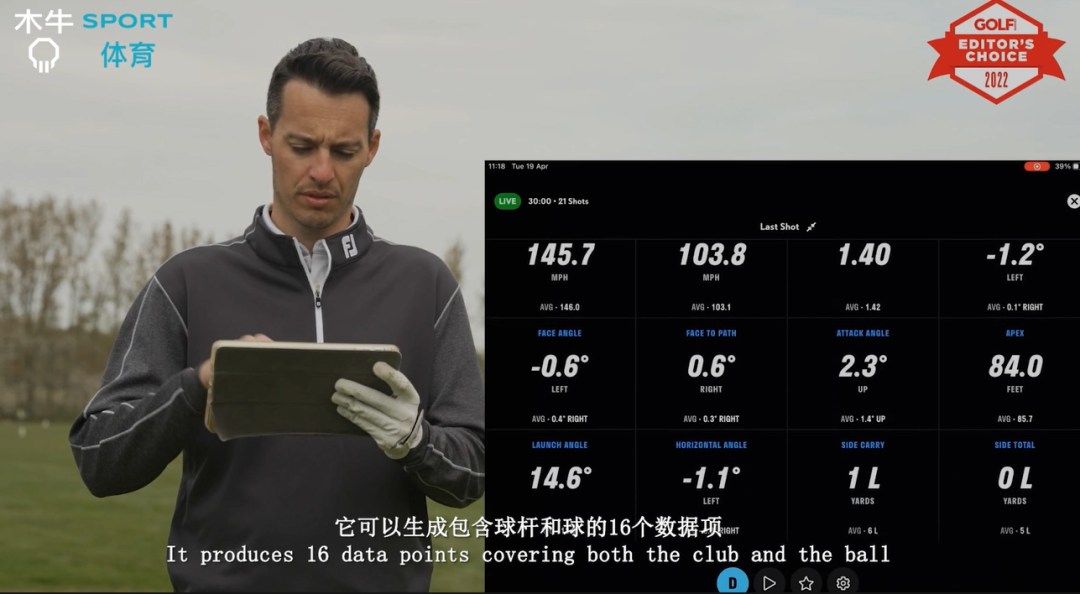
“由于这一场景要求检测到球体的自旋速度,所以我们在通用的4D检测维度上,又增加了可检测微小运动信息的第五维度‘微动’(Micro-Doppler),这是在全球首创的一个新维度,我们称之为5D(毫米波)雷达技术”,木牛COO王卫表示。
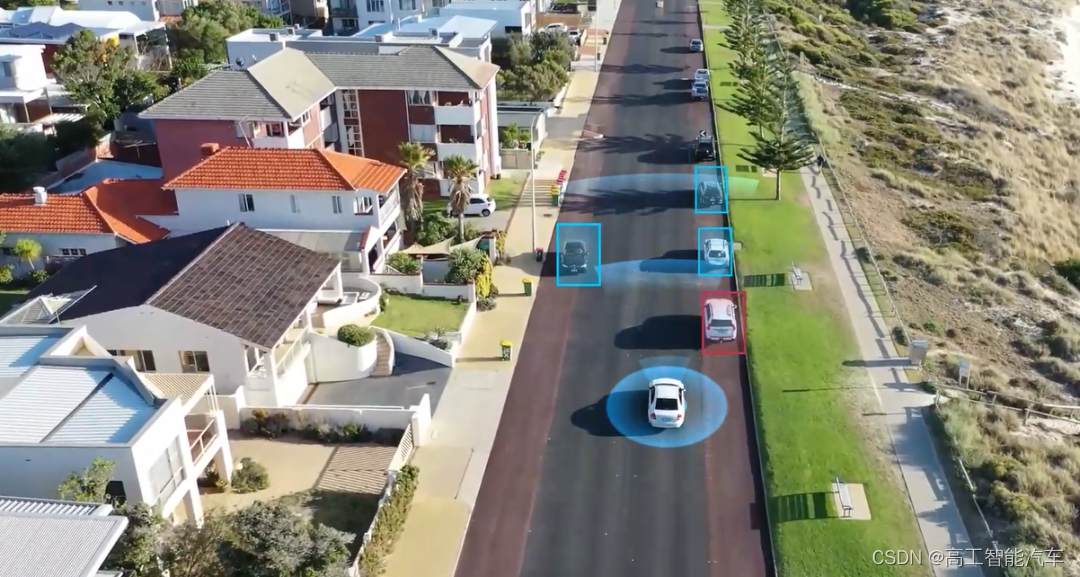
基于这一检测微小运动的第五维度“微动”,对目标的场景判断和成像准确度都将会再上一个台阶。譬如在汽车的运动场景中,除了汽车整体的移动,对于车轮这些微小的移动元素也会被捕捉到,从而帮助汽车更好地判断目标状态。
在实际路况测试中,这一技术可以极大提高特定场景的安全程度。比如在大卡车行进的交通路段,传统雷达可能会由于卡车体型较大而将其误判为两辆汽车,而增加“微动”维度后,雷达可以通过提取微动特征进行建模分类,有效回避因误判车辆而带来的风险。
不仅如此,5D雷达技术还可以针对车轮转速来判断是慢速车辆还是静止车辆,针对行人摆臂来判断是否横穿等。这项技术不但能应用于自动驾驶,还能够融入智慧交通领域,满足车路协同和数字孪生等更精准的场景感知需求。
02 国产超越:为什么是木牛科技?
从传统的毫米波雷达到4D毫米波雷达,再到如今的5D雷达技术,毫米波雷达行业持续迭代进化的背后,是不断衍生的市场需求。
一方面,汽车智能化、自动化正在普及,作为汽车环境感知的一大杀手锏,毫米波雷达的市场渗透率不断攀升。据中金研究测算,2025年中国车载毫米波雷达市场规模将达到114亿元,2020~2025年复合增长率为19%。出于多年的行业观察,木牛COO王卫表示,目前市面上智能驾驶、自动驾驶等功能渗透率已经超过了50%。
与此同时,毫米波雷达在我国不断发展的背后还有一个关键词:国产替代。在新四化的浪潮下,国产汽车电动化弯道超车成为共识,这里面则是汽车从硬件到软件、从零件到整车的国产替代,毫米波雷达自然也位列其中。
得益于上述市场环境,国内的毫米波雷达厂商迎来了广阔的市场机遇,也让木牛科技得以脱颖而出。
自2015年成立以来,木牛科技早期深耕垂直领域,近年来加速资本化步伐,仅去年一年就融资数亿元人民币,投资方既有老股东劲邦资本和君茂资本,也有微光创投、仓廪投资、翠湖基金、渤信资本、国海创新资本等新股东。除了获得国内投资机构和金融机构的认可,木牛科技还在美国完成两笔数千万美金的境外战略融资和合作,完成了全球化资本和商业运作。
探究木牛科技近年来融资进展加速的原因,离不开三个核心关键词:
首先是技术壁垒。作为一家毫米波雷达智能系统解决方案服务商,技术基因是木牛科技最突出的优势,也是其最重要的武器之一。
木牛科技拥有国内外资深的毫米波雷达产业化团队,兼具顶尖研发能力+规模量产经验。研发人员占到了70%,核心技术成员由清华、北理工、荷兰代尔夫特理工等全球知名雷达专业院校的博士和硕士组成,并在Autoliv、华域汽车等国内外头部Tier 1有过雷达领域的深耕经验,拥有平均20年+的雷达研发、设计、算法和量产经验,为木牛在全球雷达市场的开疆拓土奠定了坚固且稳定的技术壁垒。
其次,在木牛科技身上可以看到全球化的鲜明烙印。木牛从诞生之初就立足于全球化市场,在美国堪萨斯州和波士顿等地分设研发或生产基地,这样的战略布局为木牛科技带来以下两方面优势:
一方面,目前大多数核心部件供应商都在欧洲,木牛科技的全球化布局让其拥有地缘等天然优势,大大减少了整个供应链上由于距离、沟通等因素产生的附加成本;另一方面,与头部玩家的近距离接触也让木牛科技能够及时触达最前沿的行业技术,在行业感知度上占据先发地位。

最后是产品的打磨和落地能力。毫米波雷达作为一种感知和检测技术,在现实环境中往往面临着粉尘、光线、极端天气等各种复杂的环境,因此,如何保证毫米波雷达在复杂环境中的检测性能至关重要。
对此,木牛在实际的场景中积累了大量行业经验。“比如在汽车领域,我们服务过的大量车企客户,能够为产品提供更真实的检测和应用环境,依据百万量级的车辆表现,我们可以进一步强化目标识别和AI算法,从而更加全面和细致地打磨产品。”王卫表示,这些日常技术和应用场景的积累,最终都会反哺到木牛雷达产品的应用和迭代上。
在这个过程中,木牛科技还享受到了优质产品实力带来的额外馈赠,譬如在服务全球头部的紧凑型机械车辆制造商“斗山山猫Bobcat”的过程中,出于对木牛科技产品和服务能力的欣赏,客户主动提出投资需求,“客户摇身一变成了我们的股东。”王卫认为,正是这样的实力让木牛科技一直在行业中保持领先。
03 从车载向更多场景的延伸
凭借先进的产品实力和行业理念,木牛科技已经积累了许多成功案例,其中不乏许多行业头部厂商。
海外,木牛率先实现了4D毫米波雷达的批量交付,并与全球头部Tier 1公司ADAC Automotive合资成立了子公司,深度布局海外智驾市场;国内,木牛参与拟定多项车载毫米波雷达标准,开始为国内多家新能源汽车批量供货,并与国内头部乘用车企达成定点合作,实现了国产毫米波雷达替代国际知名厂商雷达的成功案例。
可以说,车载场景是木牛科技目前主要聚焦的场景。但事实上,木牛毫米波雷达的市场拓展空间,远比我们想象的要广阔。

在汽车领域以外,木牛科技的毫米波雷达产品已经在智慧交通、智能园区、立体出行、和智能体育等领域实现量产落地。
智能体育领域,木牛体育与美国Full Swing合作研发的高尔夫雷达Full Swing KIT,可实现超过300码的远距离动态追踪,针对球体被击中、到空中飞行轨迹、再到落地滚动这三段不同的运动状态,可精准感知16项挥杆和击球数据,成为老虎伍兹、琼·拉姆等体育明星的心爱之物,目前已在全球高尔夫市场热销。

交通领域,针对路口信控、城市交通、高速公路及隧道等,木牛交通研发了对应场景的WAYV系列多目标高精度的交通检测雷达,实现多场景的路侧智能和数字孪生,已在全国多地部署,有效缓解了车辆排队现象,提高了路网运行效率。
立体出行领域,木牛航空针对eVTOL(电动垂直起降)的避障和定高,基于FPGA设计了飞控系统,获得过NASA(美国国家航空航天局)与FAA(美国联邦航空局)举办的飞行器避障大赛冠军,成为堪萨斯州高端飞行器集成试点项目中唯一的雷达传感器合作伙伴,为立体出行业务奠定了坚实的技术基础。目前,木牛航空已与全球200多家高端飞行器公司达成合作。

“毫米波雷达是一种底层技术,如果能够在某些垂直场景打下坚实基础,那么这样的能力迁移到其他领域往往也同样适用。”在谈及跨越行业壁垒时,王卫表示,在这个过程中,扎实的底层技术将帮助公司在行业成熟时实现规模效应。
关于推动智能感知技术与产业场景深度融合的未来道路,王卫表示,“木牛科技目前还是聚焦在自己的核心竞争力,主攻车载雷达和交通雷达这两个特定的商业场景,未来,当我们在聚焦领域有了足够的积累之后,将去做更多的跨行业产品”。
多家投资机构,也表达了对毫米波雷达市场和木牛科技的投资观点。
微光创投投资总经理徐越表示:毫米波雷达是迈向高阶智能驾驶的核心传感器之一,并且在航空、工业、交通、体育等多个领域也都有规模化应用的明确需求。公司自创立之初就坚持正向研发理念,从毫米波雷达的核心技术框架和算法做起,加上多年在各类应用场景中累积的深刻理解,实现了完整的产品矩阵。木牛科技已成为全球首个实现4D毫米波雷达商业化落地的企业。并且随着下游应用的放量和成本体系的优化,拿到多家新能源车企的前装量产项目,形成了车载、航空、智能、体育四大业务板块,商业化进展国内领先。微光期待木牛凭借全球化布局的策略和核心技术的积累,成为全球毫米波雷达领域的领军企业。
劲邦资本合伙人表示:木牛科技团队具备优异的全栈研发能力和国际化视野,在全球40多个国家和地区拥有600多家客户。在新能源汽车智能化浪潮的变革下,木牛科技实现车载毫米波雷达快速突破,包括4D毫米波雷达的率先量产,完成车载、交通、IoT等领域布局,成为全球领先的毫米波雷达智能系统解决方案服务商。
仓廪投资合伙人钱立明表示:全球业务布局和多行业产品解决方案的开发,使得木牛科技在保持技术和产品领先优势的同时,商业化落地也取得了快速进展。公司的平台化技术、多场景应用、国际化策略可支持木牛在毫米波雷达领域的长期竞争中立于不败之地。
君茂资本合伙人张建涛表示:木牛的核心团队来自全球头部系统大厂以及科研院所,站在较高的平台,积累了丰富的高端毫米波雷达开发经验。看到公司后续的矩阵化的产品布局以及多场景的应用,特别是团队身上迸发出的勇往直前的冲劲,我们非常有信心木牛会快速成为国内乃至国际该领域的佼佼者。
渤信资本创始合伙人曲开宇表示:毫米波雷达作为智能驾驶技术中最重要的传感器,这几年已经成为了汽车科技企业的兵家必争之地,木牛科技从4D到5D在技术上的多次突破性尝试,从乘用车到工程机械应用的可靠性提升,从eVTOL和高尔夫的多行业研发合作,无一例外的表明木牛科技在向着成为全球领先的毫米波雷达智能系统企业而前进。
国海创新资本合伙人表示:毫米波雷达作为智能化时代的先进传感器,应用边界不断拓展,规模增长迅速。木牛科技在车载毫米波雷达领域,已拿到国际工程机械龙头4D成像毫米波雷达,及国内众多头部新能源汽车厂商的前向雷达、角雷达的定点,目前已进入量产供货阶段,处于国内领先地位。
翠湖基金合伙人表示:毫米波雷达作为高可靠、商业化落地明显的新一代传感器,正在大量行业中应用。木牛科技已完成车载、交通、航空、IoT等领域布局,获得国内外头部客户认可,进入高速成长期。公司团队汇聚全球雷达领域顶尖技术人才,团队优势明显,技术持续领先。4D点云技术架构,突破传统雷达技术在分辨精准度和规模部署成本上的局限性,完成商业落地。近几年毫米波雷达相较其他传感器属于价值洼地,随着点云成像技术的突破,在多个行业领域的应用,毫米波雷达行业迎来了空前绝后的发展机会。因此,看好木牛未来,技术持续领先。
关于木牛
木牛科技是专注于毫米波雷达智能系统解决方案的服务商,创立于2015年,同期创立美国子公司Ainstein,总部位于北京,在青岛、上海、美国堪萨斯州和波士顿分设研发或生产基地,致力于让全球客户享受到更可靠、更精准、更高效的毫米波雷达产品和方案。
通过研发5D雷达技术和木牛Radar OS系统平台,突破传统雷达技术在分辨精准度和规模部署成本上的局限性,将高质价比的毫米波雷达应用到自动驾驶、智慧交通、智能物联、立体出行和智能体育等多领域,加速全球的智能化、无人化和数字化。
目前,木牛科技的全球客户总数达到600多家,分布于40多个国家和地区,覆盖50多个垂直领域,获取北京市“专精特新”、国家高新技术企业、中关村高新技术企业等多项荣誉,已获得君联资本、君茂资本、劲邦资本等知名投资机构的多轮加持。
木牛科技致力成为全球领先的毫米波雷达智能系统解决方案服务商,深耕雷达技术,赋能智能系统!