上篇文章【点云处理】点云法向量估计及其加速(3)介绍了如何使用pcl提供的gpu版本法向量计算接口对点云发向量计算进行加速。不足之处在于点云k近邻查找依然比较耗时,成为影响整体计算性能的瓶颈。这篇文章就如何优化点云K近邻查找效率进行实验。上一篇文章的示例代码中knn算法实际上主要是分为两个部分:1).KDTree建树;2).根据建好的KDTree做k近邻搜索,从而建立k近邻表。
for (auto i=0; i<cloud_size; i++) {
kdtree->nearestKSearch(cloud->points[i], 10, neighbors_all[i], dists);
sizes[i] = neighbors_all[i].size();
}我们应该注意到,k近邻搜索这一步我们只是简简单单使用了一个for循环进行逐个点云的搜索,完全没有考虑到这一查找过程的可并行性,所以这里我们首先尝试使用多线程对这一过程进行提速。当我们考虑多线程时可以使用boost::thread库或者自从C++ 11开始支持的std::thread,也可以使用操作系统相关的线程API,如在Linux上,可以使用pthread库。除此之外,还可以使用omp来使用多线程。它的好处是跨平台,使用简单。这里直接使用OpenMP提供的parallel编译指示命令"#pragma omp parallel for"来告诉编译器对后面的for并行执行。编译器会创建一个包含N(在运行时决定,通常为服务器的逻辑核数)个线程的先成组,由他们来并行地运行后面的for语句块。
# pragma omp parallel for
for (auto i=0; i<cloud_size; i++) {
std::vector<float> dists;
kdtree->nearestKSearch(cloud->points[i], 10, neighbors_all[i], dists);
sizes[i] = neighbors_all[i].size();
}
ok,再次编译运行。

并没有什么卵用!!OpenMP多线程没起作用?从处理器的资源利用来看"看上去"是用上了,每个核都分担了压力。

图:无omp加速
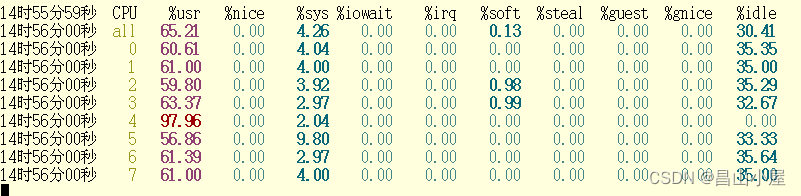
图:有omp加速
通过简单调试也可以证实是用上了,因为结果是乱序的。
28 # pragma omp parallel for
29 for (auto i=0; i<cloud_size; i++) {
30 std::vector<float> dists;
31 kdtree->nearestKSearch(cloud->points[i], 10, neighbors_all[i], dists);
32 sizes[i] = neighbors_all[i].size();
33 printf("point[%d] is processing...\n", i);
34 }
point[53295] is processing...
point[21318] is processing...
point[42636] is processing...
point[31977] is processing...
point[53296] is processing...
point[21319] is processing...
point[53297] is processing...
point[31978] is processing...
point[21320] is processing...
point[53298] is processing...
好吧,至于这种方式为什么没效果,我也不知道了。Do you known?
【补充:我项目中用到的CMakeLists.txt】
cmake_minimum_required(VERSION 3.0.2)
project(calc_normal)
### Compile as C++14, supported in ROS Kinetic and newer
add_compile_options(-std=c++14)
SET(CMAKE_BUILD_TYPE RELEASE CACHE STRING "Set build type release" FORCE)
option(USE_DEBUG "Debug Code" OFF)
option(USE_OPENMP "Use OpenMP" ON)
if(USE_DEBUG)
add_definitions(-DUSE_DEBUG)
endif()
if(USE_OPENMP)
find_package(OpenMP REQUIRED)
if(${OPENMP_FOUND})
message("Find OpenMP")
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} ${OpenMP_C_FLAGS}")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} ${OpenMP_CXX_FLAGS}")
set(CMAKE_EXE_LINKER_FLAGS "${CMAKE_EXE_LINKER_FLAGS} ${OpenMP_EXE_LINKER_FLAGS}")
endif()
endif(USE_OPENMP)
find_package(CUDA REQUIRED)
find_package(PCL 1.11 REQUIRED)
if(NOT ${PCL_FOUND})
message("PCL 1.11 Not Found ...Searching 1.12")
find_package(PCL 1.12 REQUIRED)
endif(NOT ${PCL_FOUND})
message("PCL_INCLUDE_DIRS" ${PCL_INCLUDE_DIRS})
include_directories(${PCL_INCLUDE_DIRS})
message("PCL_LIBRARY_DIRS" ${PCL_LIBRARY_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
find_package(catkin REQUIRED COMPONENTS
roscpp
std_msgs
message_generation
sensor_msgs
)
catkin_package(
CATKIN_DEPENDS
message_runtime
)
if(CMAKE_SYSTEM_PROCESSOR MATCHES "aarch64")
message("embed_platform on")
include_directories(${CUDA_INCLUDE_DIRS})
link_directories(/usr/local/cuda/targets/aarch64-linux/lib)
link_directories(/usr/local/cuda/lib64)
set(CUDA_GEN_CODE "-gencode=arch=compute_72,code=sm_72")
set(CUDA_NVCC_FLAGS "${CUDA_NVCC_FLAGS} ${CUDA_GEN_CODE}")
else()
message("embed_platform off")
include_directories(${CUDA_INCLUDE_DIRS})
link_directories(/usr/local/cuda/lib64)
set(CUDA_GEN_CODE "-gencode=arch=compute_75,code=sm_75")
set(CUDA_NVCC_FLAGS "${CUDA_NVCC_FLAGS} ${CUDA_GEN_CODE}")
endif()
include_directories(
${catkin_INCLUDE_DIRS}
)
file(GLOB_RECURSE PROJECT_SRC
./src/*.cpp
)
cuda_add_executable(${PROJECT_NAME} src/main.cpp ${PROJECT_SRC})
## Specify libraries to link a library or executable target against
target_link_libraries(${PROJECT_NAME} cudart)
target_link_libraries(${PROJECT_NAME} ${catkin_LIBRARIES})
target_link_libraries(${PROJECT_NAME} ${PCL_LIBRARIES})
if(USE_OPENMP)
if(${OpenMP_FOUND})
target_link_libraries(${PROJECT_NAME} OpenMP::OpenMP_CXX)
endif()
endif(USE_OPENMP)



![[附源码]java毕业设计源冀平行进口车系统](https://img-blog.csdnimg.cn/55896b3234de40fcbe05dd5789df774f.png)