1)实验平台:正点原子MPSoC开发板
2)平台购买地址:https://detail.tmall.com/item.htm?id=692450874670
3)全套实验源码+手册+视频下载地址: http://www.openedv.com/thread-340252-1-1.html
第二十章AXI4接口之DDR读写实验
Xilinx从Spartan-6和Virtex-6系列开始使用AXI协议来连接IP核。在ZYNQ MPSOC器件中,Xilinx在IP核中继续使用AXI协议。本章我们对AXI协议作一个简单介绍,并在Vivado中实现一个AXI4接口的IP核,用于对MPSOC PS端的DDR4进行读写测试。
本章包括以下几个部分:
2020.1简介
20.2实验任务
20.3硬件设计
20.4软件设计
20.5下载验证
20.1简介
MPSOC将高性能ARM Cotex-A系列处理器与高性能FPGA在单芯片内紧密结合,为设计带来了如减小体积和功耗、降低设计风险,增加设计灵活性等诸多优点。在将不同工艺特征的处理器与FPGA融合在一个芯片上之后,片内处理器与FPGA之间的互联通路就成了MPSOC芯片设计的重中之重。如果Cotex-A53与FPGA之间的数据交互成为瓶颈,那么处理器与FPGA结合的性能优势就不能发挥出来。
我们在前面的实验中介绍了一些MPSOC PS与PL交互所使用的接口,比如《EMIO按键控制LED实验》中的EMIO,以及《AXI GPIO按键控制LED实验》中的AXI4-Lite接口等。其中AXI4-Lite接口属于AXI4总线协议,接下来我们将对该协议作一个更具体的介绍。
AXI的英文全称是Advanced eXtensible Interface,即高级可扩展接口,它是ARM公司所提出的AMBA(Advanced Microcontroller Bus Architecture)协议的一部分。在介绍AXI协议之前,我们首先要对通信协议有一个基本的概念。
简单来说,通信协议就是指双方进行信息传递所遵循的规则和约定。其实在我们的生活当中,比如在打电话的时候,就遵循着一些基本的“通信协议”。为了更形象的说明这一概念,我们首先来看一个通话记录:
《少林寺的通话记录》
老方丈:下午张三丰和灭绝师太要来参观,你去机场接一下,我把他俩手机号给你 //主机发送控制信号
小和尚:好的,稍等,我找张纸记一下。
老方丈:嗯。 //主机等待
小和尚:我准备好了,您说吧。 //从机返回Ready信号
老方丈:张三丰的是“123-321-34567”,灭绝师太的是“123-456-56789”。 //主机突发传输数据
小和尚:记下来了。 //从机返回响应信号
上面的通话记录是一次完整的通信过程,传输的信息是两个手机号。我们把“老方丈”当成主机,“小和尚”当成从机,那么这一通信过程由主机发起,最终向从机写入两组数据(手机号)。我们需要注意的是整个过程中二者的协调配合:为了确保数据传输无误,主机需要等从机准备好之后才能发送数据;另外从机在接收数据完成后,会发送响应信号,表示传输完成。
然后再来看另外一个通话记录:
《武当山的通话记录》
张三丰:下午我要去趟少林寺,你把方丈的手机号找给我 //主机发送控制信号
小道士:找到了,188-666…… //从机返回有效数据
张三丰:等一下,我找支笔。好了,你说吧 //主机发送Ready信号
小道士:188-666-66666,念完了 //从机返回有效数据,以及响应信号
张三丰:好的。
在武当山的通话记录中,张三丰是主机,小道士是从机。通信过程同样是由主机发起,向从机请求数据。主机准备好之后发送Ready信号,接下来从机开始发送数据。从机在数据发送完成后给出响应信号,表明本次传输结束。
对比上述两个通话记录可以发现,少林寺的通话是一次主机向从机写数据的过程,而武当山的通话则是主机向从机读数据的过程。在通信过程中,主从之间会进行协调,只有等接收方准备好之后,才能开始数据传输,这种机制我们称之为“握手”。
在打电话的时候,通话双方能够理解彼此的语言,进而从中筛选有效信息。而在数字电路中,通信双方就没有那么智能了,主设备和从设备需要按照约定好的数据传输方式来发送和接收数据。AXI协议就是描述了主设备和从设备之间的数据传输方式,在该协议中,主设备和从设备之间通过握手信号建立连接。
AXI协议是一种高性能、高带宽、低延迟的片内总线,具有如下特点:
1、总线的地址/控制和数据通道是分离的;
2、支持不对齐的数据传输;
3、支持突发传输,突发传输过程中只需要首地址;
4、具有分离的读/写数据通道;
5、支持显著传输访问和乱序访问;
6、更加容易进行时序收敛。
在数字电路中只能传输二进制数0和1,因此可能需要一组信号才能高效地传输信息,这一组信号就组成了接口。AXI4协议支持以下三种类型的接口:
1、AXI4:高性能存储映射接口。
2、AXI4-Lite:简化版的AXI4接口,用于较少数据量的存储映射通信。
3、AXI4-Stream:用于高速数据流传输,非存储映射接口。
在这里我们首先解释一下存储映射(Meamory Map)这一概念。如果一个协议是存储映射的,那么主机所发出的会话(无论读或写)就会标明一个地址。这个地址对应于系统存储空间中的一个地址,表明是针对该存储空间的读写操作。
AXI4协议支持突发传输,主要用于处理器访问存储器等需要指定地址的高速数据传输场景。AXI-Lite为外设提供单个数据传输,主要用于访问一些低速外设中的寄存器。而AXI-Stream接口则像FIFO一样,数据传输时不需要地址,在主从设备之间直接连续读写数据,主要用于如视频、高速AD、PCIe、DMA接口等需要高速数据传输的场合。
在本章我们重点介绍AXI4接口,它由五个独立的通道构成:
1、读地址
2、读数据
3、写地址
4、写数据
5、写响应
下面是使用读地址和读数据通道实现读传输过程的示意图:
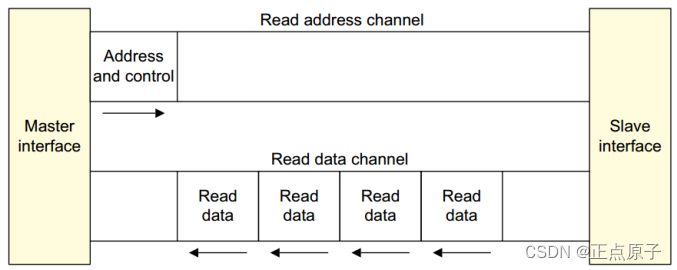
图 20.1.1 读传输过程示意图
从图 20.1.1中可以看到,在一个读传输过程中,主机首先在读地址通道给出读地址和控制信号,然后从机由读数据通道返回读出的数据。另外我们需要注意的是,这是一次突发读操作,主机只给出一个地址,从该地址连续突发读出四个数据。
写传输过程如图 20.1.2所示,它用到了写地址、写数据和写响应三个通道。主机在写地址通道给出写地址和控制信号,然后在写数据通道连续突发写四个数据。从机在接收数据之后,在写响应通道给出响应信号。
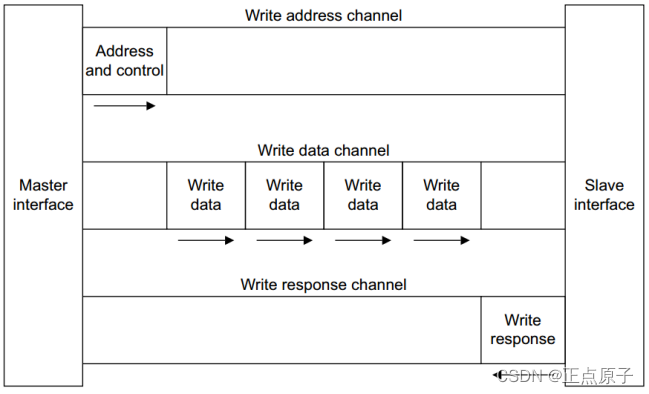
图 20.1.2 写传输过程示意图
AXI总线中的每个通道都包含了一组信息信号,还有一个VALID和一个READY信号。VALID信号由源端(source)产生,表示当前地址或者数据线上的信息是有效的;而READY信号由目的端(destination)产生,则表示已经准备好接收地址、数据以及控制信息。VALID和READY信号提供了AXI总线中的握手机制,如下图所示:
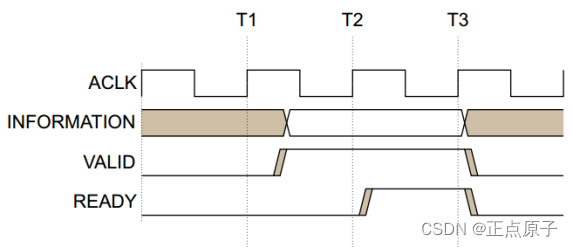
图 20.1.3 VALID和READY握手机制
在图 20.1.3中,ACLK为时钟信号,在AXI协议中,所有的输入信号都是在ACLK的上升沿采样,所有的输出信号必须在ACLK的上升沿之后才能改变。在T1之后,源端将VALID拉高,表明INFORMATION信号线上传输的是有效的地址、数据或者控制信息。目的端在T2之后将READY拉高,表明它已经准备好接收数据,此时源端必须保持INFORMATION数据稳定不变,直到T3时刻进行数据传输。
需要注意的是,源端不允许等目的端的READY信号拉高之后,才将VALID信号置为有效状态。而且,一旦VALID拉高,源端必须保持其处于有效状态,直至成功握手(在时钟上升沿检测到VALID和READY同时为有效状态)。
AXI协议的五个通道都有各自的VALID/READY握手信号对,每个通道握手信号对的名称如下图所示:
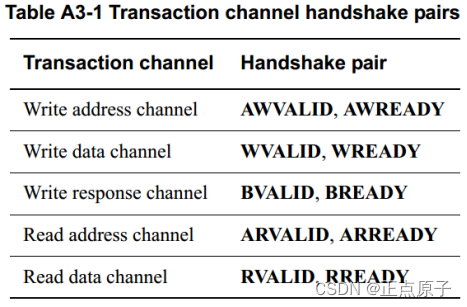
图 20.1.4 各通道握手信号名称
到这里,我们已经简单介绍了AXI4协议的读写过程,以及握手协议。关于如何实现AXI4通信协议,以及如何在设计中使用该协议进行通信,我们将在硬件设计部分进行讲解。
20.2实验任务
本章的实验任务是通过自定义一个AXI4接口的IP核,通过AXI_HP接口对PS端DDR4进行读写测试。
20.3硬件设计
根据实验任务我们可以画出本次实验的系统框图,如下图所示:
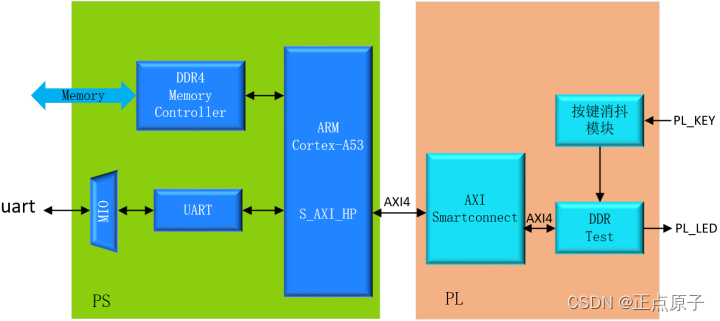
图 20.3.1 系统框图
在图 20.3.1中,DDR Test是我们自定义的IP核,具有AXI4 Master端口,该端口通过AXI Smartconnect模块,最终连接到PS端的Slave AXI_HP端口。输入的按键控制DDR Test模块对PS的DDR4进行读写测试,并在读写测试结束后,通过两个PL LED灯分别指示读写完成和读写错误。需要说明的是,DDR Test模块通过输入信号的上升沿作为对DDR4读写测试的触发信号,需要对输入的按键信号进行消抖,否则会导致读写错误。
首先创建Vivado工程,工程名为“axi4_ddr_rw”,然后创建Block Design设计(design_1.bd)并添加Zynq UltraScale+ MPSOC模块。接下来按照《“Hello World”实验》中的步骤2-7、2-8分别配置PS的UART和DDR控制器。需要特别注意的是,我们在《“Hello World”实验》的步骤2-10中,移除了PS中与PL端交互的接口信号,在我们本次实验中要保留时钟“PL Fabric Clocks”和复位“Fabric Reset Enable”信号。
由于本次实验用到了PS端的HP接口,因此在Zynq UltraScale+ MPSOC模块的配置界面左侧点击“PS-PL Configuration”标签,然后依次展开右侧界面中PS-PL Interfaces-> Slave Interface->AXI HP,勾选“AXI HP0 FPD”,如下图所示:
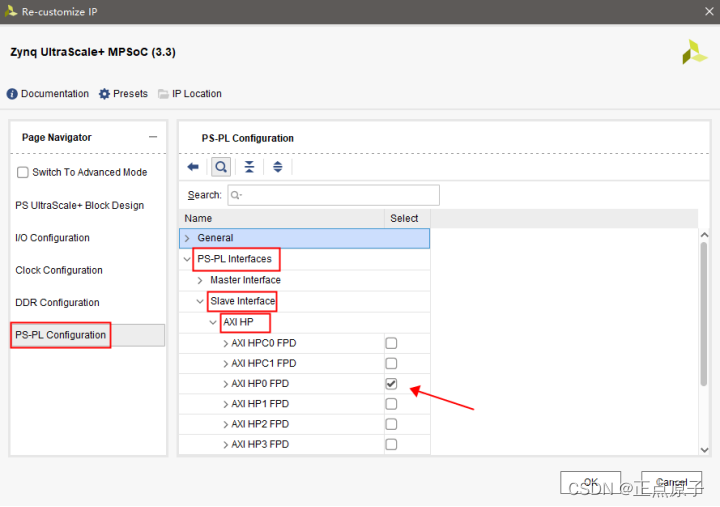
图 20.3.2 PS-PL接口配置
最后点击右下角的“OK”,本次实验Zynq UltraScale+ MPSOC模块就配置完成了。
Zynq UltraScale+ MPSOC模块配置完成后其接口如下图所示:
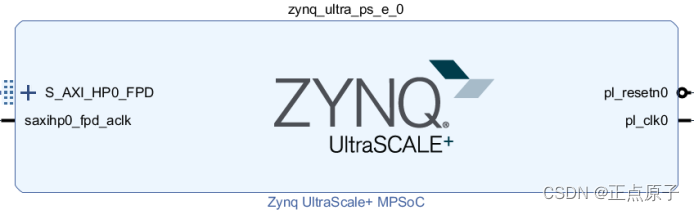
图 20.3.3 Zynq UltraScale+ MPSOC模块接口
在图 20.3.3中,S_AXI_HP0_FPD是PS端的AXI高性能接口,它是一个从接口,连接到PS内的存储器互联,用于PL访问PS内的存储设备,包括OCM和DDR。
在本次实验中,PS内的数据通路如图 20.3.4所示。我们在PL内自定义的DDR Test IP核作为主设备,通过PS Slave AXI_HP0接口,与DDR控制器进行通信,最终对DDR4存储器进行读写操作。
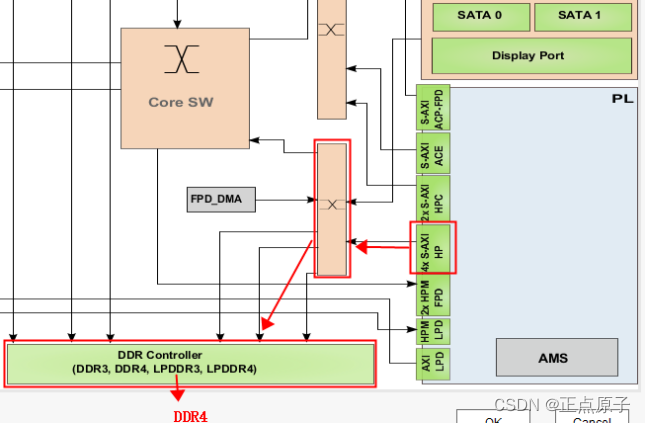
图 20.3.4 PS内的数据通路
接下来我们要在Block Design中添加PL端的自定义IP核。
在添加该IP之前,我们需要先自定义一个带有AXI4 Master端口的IP核,并将其添加到工程的IP库中。我们在《自定义IP核-呼吸灯实验》中介绍了如何定义一个带有AXI-Lite Slave接口的IP核,在本次实验中定义IP的方法与之相同,只是这次我们要选择AXI4 Master接口。
在菜单栏中点击“Tools”,然后在下拉列表中选择“Create and Package New IP”,如下图所示:
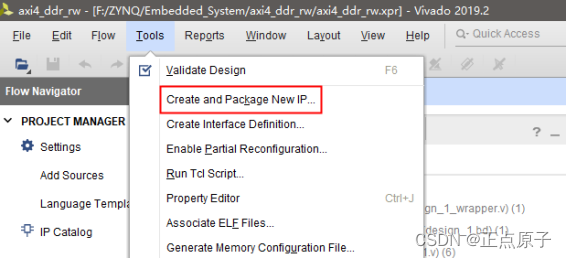
图 20.3.5 创建IP
在弹出的对话框中直接点击“Next”,如下图所示:
图 20.3.6 创建和封装IP
在下图所示的界面中选择“Create a new AXI4 peripheral”,点击“Next”:
接下来设置IP核的名称为“axi4_rw_test”,并将IP的路径修改为当前工程路径下的“ip_repo”文件夹,最后点击“Next”,如下图所示:
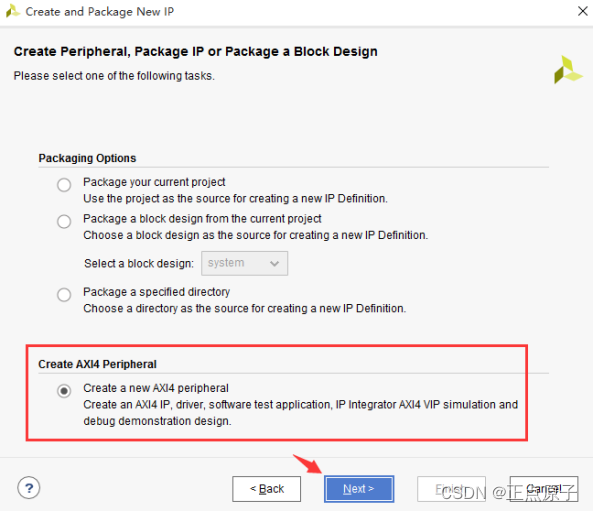
图 20.3.7 设置IP名称和路径
在“Add Interfaces”界面中修改接口名称为“M_AXI”,选择接口类型为“Full”,接口模式为“Master”,数据位宽为“32”。如下图所示:
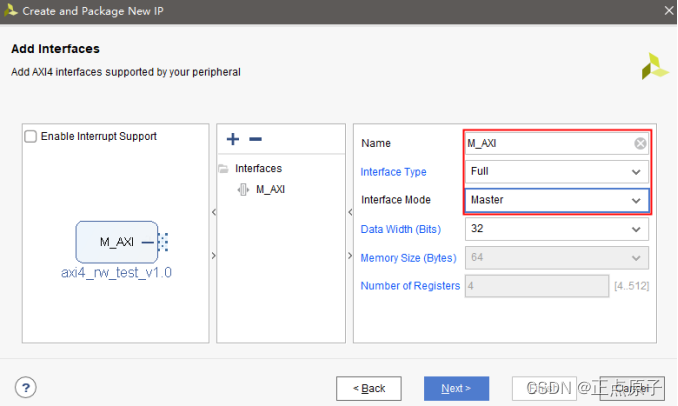
图 20.3.8 自定义IP核接口配置
图 20.3.8中对IP核接口的配置与《自定义IP核——呼吸灯实验》不同,在这里我们新建的IP核作为主机(Master),除此之外我们使用的接口类型变成了AXI-Full,而不再是AXI-Lite。
设置完成后点击上图中右下角的“Next”。
接下来在图 20.3.9中选择“Edit IP”,最后点击“Finish”,如下图所示:
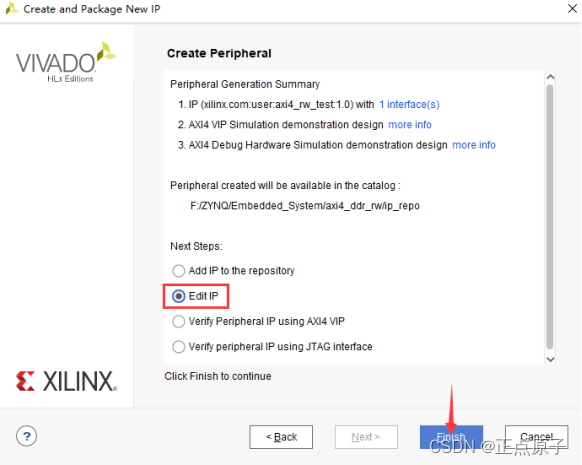
图 20.3.9 创建外设
在上图中点击“Finish”后会自动打开一个新的Vivado工程,工程名为“edit_ axi4_rw_test_v1_0”,如图 20.3.10所示。我们可以在这个工程中对创建的IP核——AXI4_RW_TEST进行编辑。
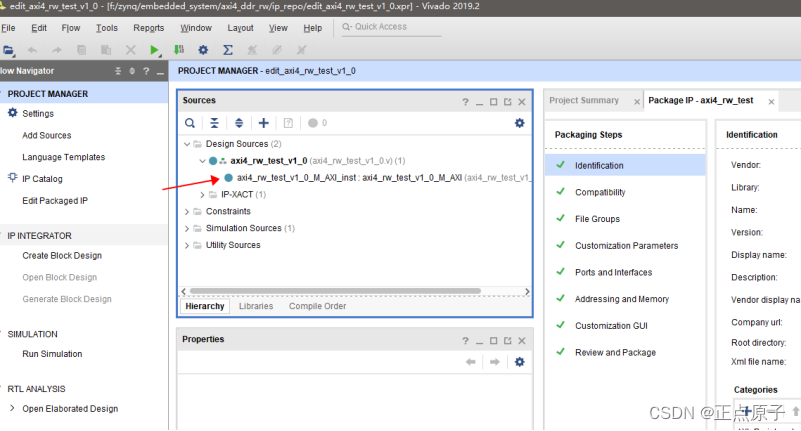
图 20.3.10 Edit IP工程
AXI4接口共有五个独立的通道,每个通道又有少则几个,多则十几个信号,如果让我们自己来实现这样一个接口还是比较复杂的。不过大家不用担心,我们在图 20.3.8中创建AXI4接口的IP时,Vivado提供的IP封装工具已经自动帮我们实现了这样一个接口,并提供了一个示例程序。
在图 20.3.10中,箭头所指示的文件实现了AXI4协议下的读写测试模块,我们甚至都不用对代码作任何修改,即可实现对DDR的读写测试功能。虽然该模块的代码看上去比较长(900多行),但是大多是一些注释,非常详尽。大家可以通过阅读代码及注释,来学习AXI4协议主机的实现方式。
在这里我们只贴出部分代码:
735 //implement master command interface state machine
736
737 always @ ( posedge M_AXI_ACLK)
738 begin
739 if (M_AXI_ARESETN == 1'b0 )
740 begin
741 // reset condition
742 // All the signals are assigned default values under reset condition
743 mst_exec_state <= IDLE;
744 start_single_burst_write <= 1'b0;
745 start_single_burst_read <= 1'b0;
746 compare_done <= 1'b0;
747 ERROR <= 1'b0;
748 end
749 else
750 begin
751
752 // state transition
753 case (mst_exec_state)
754
755 IDLE:
756 // This state is responsible to wait for user defined C_M_START_COUNT
757 // number of clock cycles.
758 if ( init_txn_pulse == 1'b1)
759 begin
760 mst_exec_state <= INIT_WRITE;
761 ERROR <= 1'b0;
762 compare_done <= 1'b0;
763 end
764 else
765 begin
766 mst_exec_state <= IDLE;
767 end
768
769 INIT_WRITE:
770 // This state is responsible to issue start_single_write pulse to
771 // initiate a write transaction. Write transactions will be
772 // issued until burst_write_active signal is asserted.
773 // write controller
774 if (writes_done)
775 begin
776 mst_exec_state <= INIT_READ;
777 end
778 else
779 begin
780 mst_exec_state <= INIT_WRITE;
781
782 if (~axi_awvalid && ~start_single_burst_write && ~burst_write_active)
783 begin
784 start_single_burst_write <= 1'b1;
785 end
786 else
787 begin
788 start_single_burst_write <= 1'b0; //Negate to generate a pulse
789 end
790 end
791
792 INIT_READ:
793 // This state is responsible to issue start_single_read pulse to
794 // initiate a read transaction. Read transactions will be
795 // issued until burst_read_active signal is asserted.
796 // read controller
797 if (reads_done)
798 begin
799 mst_exec_state <= INIT_COMPARE;
800 end
801 else
802 begin
803 mst_exec_state <= INIT_READ;
804
805 if (~axi_arvalid && ~burst_read_active && ~start_single_burst_read)
806 begin
807 start_single_burst_read <= 1'b1;
808 end
809 else
810 begin
811 start_single_burst_read <= 1'b0; //Negate to generate a pulse
812 end
813 end
814
815 INIT_COMPARE:
816 // This state is responsible to issue the state of comparison
817 // of written data with the read data. If no error flags are set,
818 // compare_done signal will be asseted to indicate success.
819 //if (~error_reg)
820 begin
821 ERROR <= error_reg;
822 mst_exec_state <= IDLE;
823 compare_done <= 1'b1;
824 end
825 default :
826 begin
827 mst_exec_state <= IDLE;
828 end
829 endcase
830 end
831 end //MASTER_EXECUTION_PROC
上面的代码实现了一个状态机,其状态转换图如下所示:
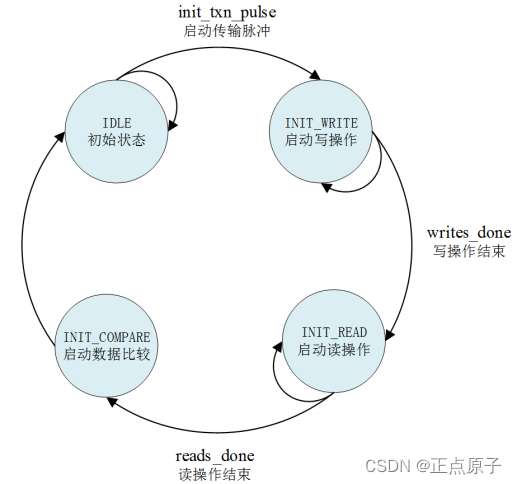
图 20.3.11 状态转换图
系统复位后,状态机处于初始状态,在该状态下等待外部输入的启动传输脉冲init_txn_pulse。一旦检测到init_txn_pulse为高电平,状态机跳转到INIT_WRITE状态。
在INIT_WRITE状态下,状态机拉高start_single_burst_write信号,来不断地启动AXI4 Master接口对Slave端大小为4KB的存储空间进行突发写操作。写操作完成后,write_done信号会拉高,状态机进入INIT_READ状态。
在INIT_READ状态下,状态机拉高start_single_burst_read信号,不断地启动AXI4 Master接口对Slave端同一存储空间进行突发读操作,同时将读出的数据与写入的数据进行对比。读操作完成后,read_done信号拉高,状态机进入INIT_COMPARE状态。
在INIT_COMPARE状态下,判断AXI4接口在读写过程中的是否发生错误,并将错误状态赋值给ERROR信号,然后将compare_done信号拉高,表示一次读写测试完成。最后跳转到IDLE状态,等待下一次读写操作的启动信号。
我们在查看了图 20.3.10中箭头所指示的IP核源码后,不需要再对IP作任何修改,直接关闭名为edit_AXI4_RW_TEST_v1_0的工程。最终我们创建的IP核将通过AXI4 Master端口向Slave端指定的4K存储空间中连续写入1024个数据,写入的数值从1累加到1024,每个数据占32bit。
IP核创建完成后,我们在工程目录下的ip_repo文件夹中可以找到IP相关的文件,如下图所示:

图 20.3.12 IP核相关的文件
需要注意的是,在图 20.3.12中我们只需要保留红色方框中的文件夹即可,其余文件及文件夹是用于对IP进行编辑的工程文件,我们可以直接删除。
回到axi4_ddr_rw工程界面,在左侧“Flow Navigator”一栏点击“IP Catalog”,然后在右侧的IP目录中可以看到我们前面所创建的IP核——AXI4_RW_TEST,该IP已经自动添加到了当前工程的IP库中。
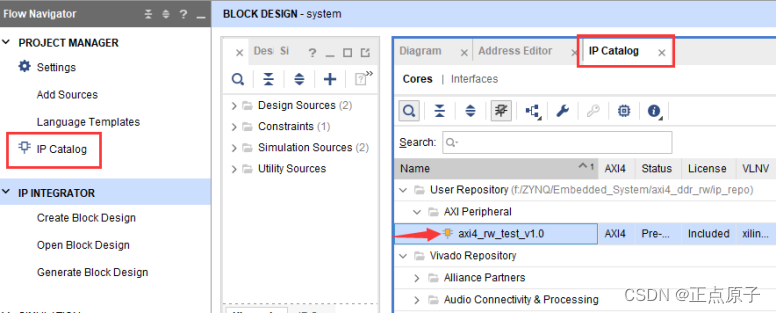
图 20.3.13 IP目录
接下来在Diagram窗口中给设计添加自定义的IP核AXI4_RW_TEST,添加完成后如下图所示:
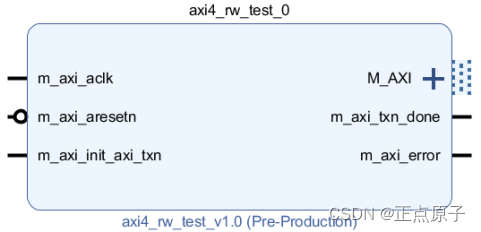
图 20.3.14 添加AXI4_RW_TEST IP核
在图 20.3.14中,M_AXI是AXI-Full类型的主机接口,我们将通过这个接口对PS端的DDR4进行读写操作。AXI4_RW_TEST IP核在检测到m_axi_init_axi_txn端口的上升沿后会启动读写过程,并将读出的数据与写入的数据作比较,比较完成后m_axi_txn_done输出高电平。另外,在比较完成后,m_axi_error信号会指示整个过程是否出错。如果在读写过程中出错,或者在比较的过程中发现读出的数据与写入的数据不一致,那么m_axi_error将会拉高。
添加完自定义IP核之后,双击该IP核对其进行配置,如下图所示:
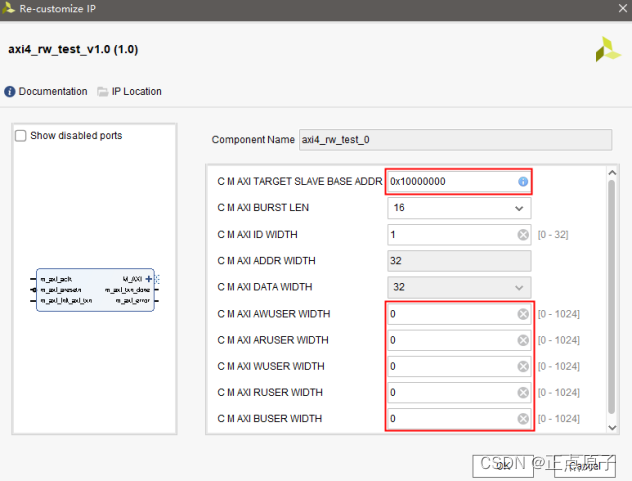
图 20.3.15 配置AXI4_RW_TEST IP核
在图 20.3.15中,我们将变量C M AXI TARGET SLAVE BASE ADDR的值修改为0x1000_0000,它位于DDR4存储器的地址空间,是AXI4_RW_TEST IP核进行读写操作的起始地址。我们将该地址之前的存储空间预留下来,用于运行PS中的软件程序。
接下来,我们还要添加Utility Vector Logic IP核。然后将其配置成非门,位宽为1,作为反向器使用,如下图所示:
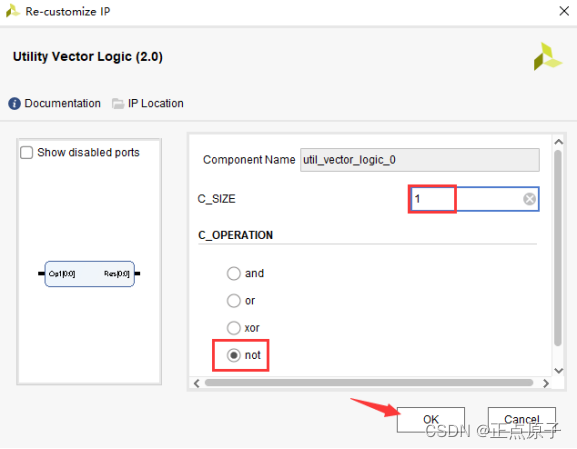
图 20.3.16 Utility Vector Logic IP核设置
这是因为我们需要使用PL端的按键来作为AXI4_RW_TEST IP核的启动信号,MPSOC开发板上的按键在按下的时候为低电平,因此我们通过添加一个反向器,将其修改为按下时输出高电平。
接下来为按键添加消抖模块,用于消除按键的抖动。添加的方法是先将《MPSOC之FPGA开发指南》中“按键控制蜂鸣器”里的按键消抖模块(key_debounce.v)添加至工程,然后再添加至框图设计中即可。下面开始具体操作,我们在工程目录.\axi4_ddr_rw\axi4_ddr_rw.srcs\sources_1下创建一个文件夹new,将key_debounce.v拷贝至new文件夹下,如下图所示:
图 20.3.17 key_debounce路径
接下来将key_debounce.v模块添加至工程中,右击Design Sources下的design_1(design_1.bd),选择“Add Sources…”,如下图所示。
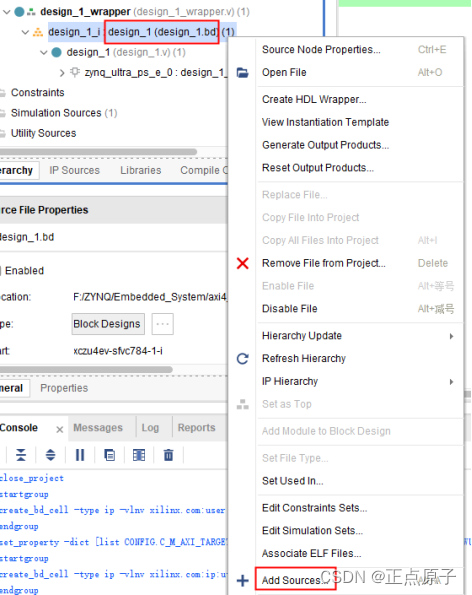
图 20.3.18 添加源文件
在弹出的页面中选择第二个“Add or create design sources”,点击“NEXT”。
然后点击页面中的“Add Files”,在弹出的页面中选择“key_debounce.v”,如下图所示。
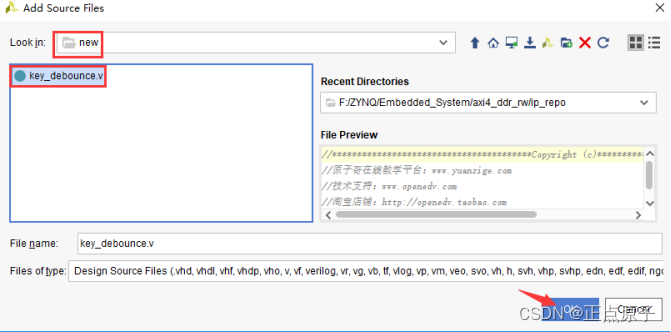
图 20.3.19 添加“key_debounce.v”
最后点击“Finish”完成代码的添加,如下图所示。
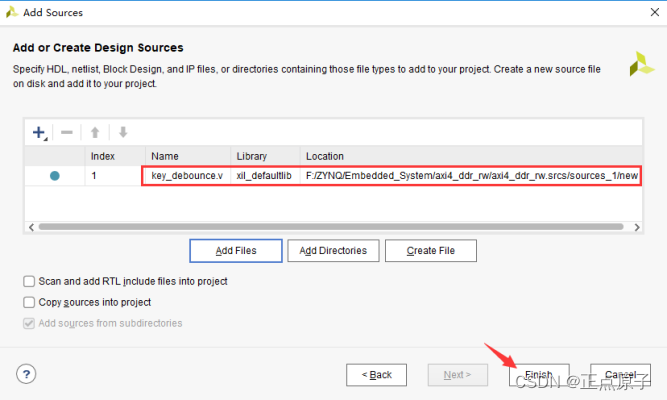
图 20.3.20 点击“Finish”
此时在Design Sources界面下,可以看到刚刚添加的文件,如下图所示。
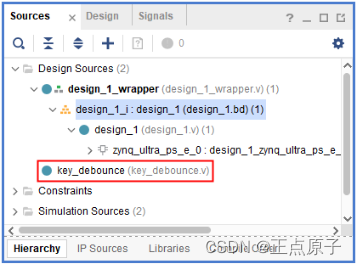
图 20.3.21 添加完成界面
接下来在Diagram界面空白处右击,选择“Add Module…”,如下图所示。
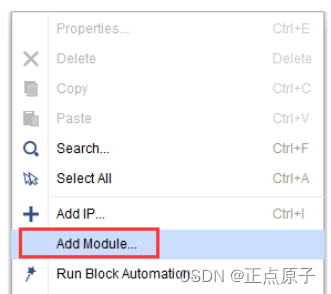
图 20.3.22 点击“Add Module”
此时会弹出工程中添加的.v文件,将key_debounce.v添加进来,如下图所示。
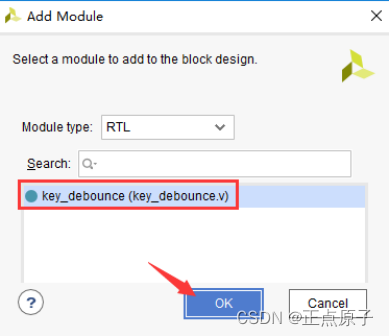
图 20.3.23 添加“key_debounce.v”至BD中
需要说明的是,如果上图的界面中,没有出现按键消抖模块,可能是软件界面还没有更新刚刚添加的设计文件,可以稍作等待后再添加,添加完成后如下图所示。
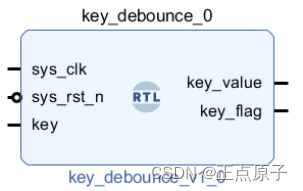
图 20.3.24 消抖模块成功添加至BD界面中
IP核添加完成后,使用工具的自动连接功能,对设计进行连线,连线后如下图所示:

图 20.3.25 自动连接
以上是使用Vivado软件的自动连线,接下来还需要手动进行消抖模块、反向器、AXI4_RW_TEST IP核之间的连接。连接完成后,在Diagram窗口空白处右击,然后选择“Regenerate Layout”对设计进行重新布局,布局后的界面如下图所示:

图 20.3.26 重新布局后的设计界面
从上图中可以看到,在执行了自动连接之后,工具自动添加了两个IP核,分别是AXI智能互联(AXI Smartconnect)和处理器系统复位(Processor System Reseet)。接下来需要将消抖模块key端口引出,用于连接开发板PL端按键,并重命名为key_int,命名方法参考AXI GPIO按键LED实验;还需要将AXI4读写测试模块的m_axi_txn_done和m_axi_error两个端口引出,用于连接PL端LED灯,并分别重命名为compare_done和error_flag,如下图所示:

图20.3.27 引出管脚
图20.3.27中橙色的连线标注出了本设计中AXI4总线的连接,其中AXI4_RW_TEST IP核的M_AXI作为主机接口,Zynq UltraScale+ MPSOC的S_AXI_HP0_FPD为从机接口,中间经过了AXI Smartconnect。AXI Smartconnect的功能与AXI Interconnect IP核类似,都是用于将AXI存储器映射的主器件连接到存储器映射的从器件。
到这里我们的Block Design就设计完成了,在Diagram窗口空白处右击,然后选择“Validate Design”验证设计。验证完成后弹出对话框提示“Validation Successful”表明设计无误,点击“OK”确认。最后按快捷键“Ctrl + S”保存设计。
接下来在Source窗口中右键点击Block Design设计文件“design_1.bd”,然后依次执行“Generate Output Products”和“Create HDL Wrapper”。
在左侧Flow Navigator导航栏中找到RTL ANALYSIS,点击该选项中的“Open Elaborated Design”,在弹出的窗口中点击“OK”。或者在菜单栏中点击 Layout,在下拉列表中选择I/O Planning以打开I/O Ports窗口。我们将在 I/O Ports 窗口中对key_init等接口进行管脚分配,如下图所示:
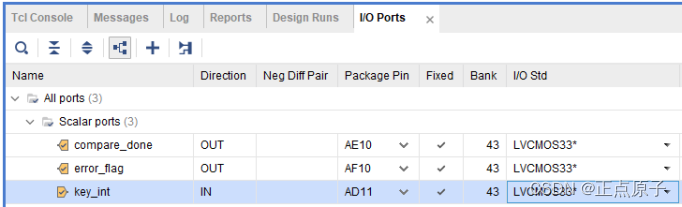
图20.3.28 管脚分配
在图20.3.28中,我们将key_init分配到了AD11引脚上,该引脚最终与MPSOC开发板上的按键PL_KEY0相连接;compare_done和error_flag分别连接到开发板上的LED:PL_LED0和PL_LED1。管脚分配完成后按快捷键Ctrl+S保存管脚约束,并在弹出的保存约束窗口中输入文件名“axi4_ddr_rw”。
最后在左侧Flow Navigator导航栏中找到PROGRAM AND DEBUG,点击该选项中的“Generate Bitstream”,对设计进行综合、实现、并生成Bitstream文件。
在生成Bitstream之后,在菜单栏中选择 File > Export > Export hardware导出硬件,并在弹出的对话框中,勾选“Include bitstream”。将导出的“design_1_wrapper.xsa”文件放到vitis文件夹,然后在菜单栏选择File > Launch Vitis,启动VITIS软件。
20.4软件设计
在VITIS软件中新建一个空的应用工程,应用工程名为“axi4_ddr_rw”。然后为应用工程新建一个源文件“main.c”,我们在新建的main.c文件中输入本次实验的代码:
1 #include "stdio.h"
2 #include "xil_cache.h"
3 #include "xil_printf.h"
4 #include "xil_io.h"
5
6 int main()
7 {
8 int i;
9 char c;
10
11 Xil_DCacheDisable();
12 printf("AXI4 PL DDR TEST!\n\r");
13
14 while(1)
15 {
16 scanf("%c",&c);
17 if(c == 'c'){
18 printf("start\r\n");
19 for(i=0;i<4096;i=i+4)
20 {
21 printf("%d is %d\n",i,(int)(Xil_In32(0x10000000+i)));
22 }
23 }
24 }
25 return 0;
26 }
可以看出,我们的软件程序特别简单。在代码的第14行至24行,通过一个while(1)死循环,连续判断用户输入的字符。当输入字符“c”时,程序通过一个for循环开始从地址0x1000_0000读取DDR存储器中的数据,读取的存储空间大小为4KB。需要注意的是,变量i每次累加4,这是因为我们调用了函数Xil_In32( )来读取内存数据,每次读取32bit。而内存地址是以字节(1字节==8bit)为单位的,那么操作完成后地址应该累加4。
可以看出,我们在软件中读取的内存地址与硬件设计过程中DDR Test IP核所写入的地址是一致的。我们将软件读出的数据通过串口打印出来,与DDR Test IP核写入的数据进行对比,即可验证我们通过AXI4接口对DDR进行的读写操作是否成功。
另外,在代码的第11行,我们通过调用函数Xil_DCacheDisable( )来关闭数据缓存(Data Cache),以避免从缓存中读取数据。这是因为在对同一地址进行读操作时,读出的有可能是Data Cache中缓存的数据,而不是DDR中真正的数据。
20.5下载验证
首先我们将下载器与开发板上的JTAG接口连接,下载器另外一端与电脑连接。然后使用USB连接线将USB_UART(开发板PS PORT)接口与电脑连接,用于串口通信。最后连接开发板的电源,给开发板上电。
打开Vitis Terminal终端,设置并连接串口。然后下载本次实验的程序,下载完成后,在下方的Vitis Terminal中可以看到应用程序打印的信息“AXI4 PL DDR TEST!”。
然后在Vitis Terminal窗口中输入字符“c”,然后按回车键发送。程序会打印从DDR中读出的数据,如下图所示:
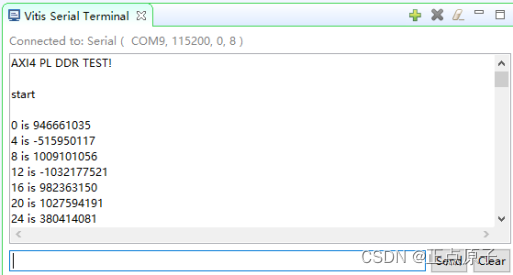
图 20.5.1 第一次从DDR4中读出的数据
如图 20.5.1所示,串口打印出了DDR存储空间中从地址0x1000_0000开始的1024个数据,每个数据占4个字节。从图中可以看出,开发板上电后,在没对该地址空间进行写操作之前,DDR中的数据是随机的。
我们按下开发板上的按键PL_KEY1然后释放,该动作会启动AXI4_RW_TEST IP核对DDR的读写操作。然后开发板上的PL_LED1会点亮,表示读写操作完成。如下图所示:

图 20.5.2 MPSOC开发板实物图
在图 20.5.2中,如果旁边的PL_LED2也点亮了,这表明在对DDR进行读写操作过程中出现了错误。但是这个错误指示灯点亮的原因并不唯一,通过分析AXI4_RW_TEST IP核的源码可以看出,在AXI4通信过程中写响应出错、读响应出错、以及读出与写入的数据不一致均会导致错误指示灯点亮。
笔者最早在实现本次实验功能的时候,旁边的PL_LED2偶尔也会亮,是由于没有对按键进行消抖处理所致,添加按键消抖模块后,没有再出现读写错误的情况。
在Vitis Terminal窗口中重新输入字符“c”并发送,程序会再次打印从DDR中读出的数据,如下图所示:
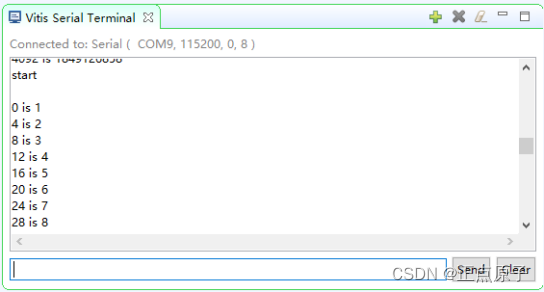
图 20.5.3 第二次从DDR4中读出的数据
从图 20.5.3中可以看出,PS端软件从DDR中指定的4KB存储空间中读出的数据依次为1到1024,与AXI4_RW_TEST IP核写入的数据一致,说明本次实验在MPSOC开发板上面下载验证成功。








![[oeasy]python0095_乔布斯求职_雅达利_atari_breakout_打砖块_布什内尔_游戏机_Jobs](https://img-blog.csdnimg.cn/img_convert/c7a012dc80cc16247d52f4899a561594.png)