更好的阅读体验 \huge{\color{red}{更好的阅读体验}} 更好的阅读体验
文章目录
- 2.1 关系数据结构及形式化定义
- 2.1.1 关系
- 域
- 笛卡尔积
- 关系
- 码
- 三类关系
- 基本关系的性质
- 2.1.2 关系模式
- 2.1.3 关系数据库
- 2.1.4 关系模型的存储结构
- 2.2 关系操作
- 2.2.1 基本的关系操作
- 2.2.2 关系数据语言的分类
- 2.3 关系的完整性
- 2.3.1 实体完整性
- 2.3.2 参照完整性
- 2.3.3 用户定义的完整性
- 2.4 关系代数
- 2.4.1 传统的集合运算
- 2.4.2 专门的关系运算
- 选择
- 投影
- 连接
- 除运算
提出关系模型的是美国 IBM 公司的 E.F.Codd:
- 1970年提出关系数据模型,之后,提出了关系代数和关系演算的概念。
- 1972年提出了关系的第一、第二、第三范式。
- 1974年提出了关系的
BC范式。
2.1 关系数据结构及形式化定义
按照数据模型的三个要素:
- 关系模型由关系数据结构;
- 关系操作集合;
- 关系完整性约束三部分组成。
下面将对这三部分内容进行分别介绍。
2.1.1 关系
关系模型的数据结构非常简单,只包含单一的数据结构—关系。在用户看来,关系模型中数据的逻辑结构是一张扁平的二维表。
域
- 是一组具有相同数据类型的值的集合。
- 例如:自然数、整数、实数的集合。
笛卡尔积
- 给定一组域: D 1 , D 2 , D 3 , … , D n D_1, D_2, D_3, \dots, D_n D1,D2,D3,…,Dn,且允许其中某些域是相同的
- 则其笛卡尔积为: D 1 × D 2 × D n × ⋯ × D n = { ( d 1 , d 2 , d 3 … , d n ) ∣ d i ∈ D i , i = 1 , 2 , … , n } D_1 \times D_2 \times D_n \times \dots \times D_n = \{ (d_1, d_2, d_3 \dots, d_n)\ | \ d_i \in D_i, i = 1, 2, \dots , n \} D1×D2×Dn×⋯×Dn={(d1,d2,d3…,dn) ∣ di∈Di,i=1,2,…,n}。
- 其中每一个元素 ( d 1 , d 2 , d 3 … , d n ) (d_1, d_2, d_3 \dots, d_n) (d1,d2,d3…,dn) 叫做一个 n n n 元组,或简称元组,其中 d i d_i di 为分量。
一个域允许的不同取值个数称为这个域的基数:
- 若 D i ( i = 1 , 2 , … , n ) D_i (i = 1, 2, \dots, n) Di(i=1,2,…,n) 为有限集,其基数为 m i ( i = 1 , 2 , … , n ) m_i(i = 1, 2, \dots, n) mi(i=1,2,…,n)
- 则 D 1 × D 2 × D n × ⋯ × D n D_1 \times D_2 \times D_n \times \dots \times D_n D1×D2×Dn×⋯×Dn 的基数 M = ∏ i = 1 n m i M = \prod^{n}_{i = 1}m_i M=∏i=1nmi。
笛卡尔积可以表示为一张二维表,表中的每行对应一个元组,表中的每一列的值来自一个域。
例如:
-
已知: D 1 = X = { a , b } , D 2 = Y = { c , d } D_1 = X = \{ a, b \}, D_2 = Y = \{ c, d \} D1=X={a,b},D2=Y={c,d}
-
则 D 1 × D 2 D_1 \times D_2 D1×D2 的笛卡尔积为 D 1 × D 2 = { ( a , c ) , ( a , d ) , ( b , c ) , ( b , d ) } D_1 \times D_2 = \{ (a, c), (a, d), (b, c), (b, d) \} D1×D2={(a,c),(a,d),(b,c),(b,d)}
-
笛卡尔基数为 2 × 2 = 4 2 \times 2 = 4 2×2=4,共 4 4 4 个元组,可生成表格如下:
-
X X X Y Y Y a a a c c c a a a d d d b b b c c c b b b d d d
关系
-
D 1 × D 2 × D n × ⋯ × D n D_1 \times D_2 \times D_n \times \dots \times D_n D1×D2×Dn×⋯×Dn 的子集叫做在域 D 1 , D 2 , D 3 , … , D n D_1, D_2, D_3, \dots, D_n D1,D2,D3,…,Dn 上的关系。
-
表示为 R ( D 1 , D 2 , D 3 , … , D n ) R(D_1, D_2, D_3, \dots, D_n) R(D1,D2,D3,…,Dn),其中 R R R 为关系名, n n n 为关系的目或度(Degree)。
-
关系中的每个元素是关系中的元组,通常用 t t t 表示。
-
当 n = 1 n = 1 n=1 时,称该关系为单元关系(Unary relation)或一元关系, n = 2 n = 2 n=2 时称为二元关系(Binary relation)。
关系是笛卡儿积的有限子集,所以关系也是一张二维表,表的每行对应一个元组,表的每列对应一个域。
码
-
候选码(Candidate key):若关系中的某一属性组的值能唯一地标识一个元组,而其子集不能,则称该属性组为候选码(如学号,身份证号)。
-
全码(All key):在最简单的情况下,候选码只包含一个属性。在最极端的情况下,关系模式的所有属性是这个关系模式的候选码。
-
主码(Primary key):若一个关系有多个候选码,则选定其中一个为主码。候选码的诸属性称为主属性(Prime attribute)。不包含在任何侯选码中的属性称为非码属性或非主属性(Non-key attribute)。
主码和候选码本质相同,只是数量不同。
三类关系
- 基本关系(基本表或基表):实际存在的表,是实际存储数据的逻辑表示。
- 查询表:查询结果对应的表。
- 视图表:由基本表或其他视图表导出的表,是虚表,不对应实际存储的数据。
基本关系的性质
- 列同质的(Homogeneous)每一列中的分量是同一类型的数据,来自同一个域。
- 不同的列可出自同一个域:
- 其中的每一列称为一个属性。
- 不同的属性要给予不同的属性名。
- 列的顺序无所谓(属性名打破有序性)。
- 任意两个元组不能完全相同(候选码不同)。
- 行的顺序无所谓,即行的次序可以任意交换。
- 分量必须取原子值,每一个分量都必须是不可分的数据项。这是规范条件中最基本的。
2.1.2 关系模式
在数据库中要区分型和值,关系数据库中:
- 关系模式(Relation Schema)是型,关系是值。
关系模式是对关系的描述:
-
元组集合的结构:
- 属性构成
- 属性来自的域
- 属性与域之间的映象关系
-
完整性约束条件,元组语义。
关系的描述称为关系模式(relation schema)。它可以形式化地表示为 R ( U , D , D O M , F ) R(U, D, DOM, F) R(U,D,DOM,F):
-
R R R 为关系名
-
U U U 为组成该关系的属性名集合
-
D D D 为 U U U 中属性所来自的域
-
D O M DOM DOM 为属性向域的映像集合
-
F F F 为属性间数据的依赖关系集合。
2.1.3 关系数据库
在关系模型中,实体以及实体间的联系都是用关系来表示的。在一个给定的应用领域中,所有关系的集合构成一个关系数据库。
关系数据库也有型和值之分:
- 关系数据库的型也称为关系数据库模式,是对关系数据库的描述。
- 关系数据库模式包括若干域的定义,以及在这些域上定义的若干关系模式。
- 关系数据库的值是这些关系模式在某一时刻对应的关系的集合,通常就称为关系数据库。
2.1.4 关系模型的存储结构
- 有的关系数据库管理系统中一个表对应一个操作系统文件,将物理数据组织交给操作系统完成。
- 有的关系数据库管理系统从操作系统那里申请若干个大的文件,自己划分文件空间,组织表、索引等存储结构,并进行存储管理。
2.2 关系操作
2.2.1 基本的关系操作
- 查询:
- 基本操作:选择、投影、并、差、笛卡尔积;
- 其他操作:连接、除、交,可由上述基本操作导出。
- 数据更新:插入、删除、修改。
关系操作的特点是集合操作方式:
- 操作的对象和结果都是集合。
- 这种操作方式也称为一次一集合(set-at-a-time)的方式。
相应地,非关系数据模型的数据操作方式则为一次一记录(record-at-a-time)的方式。
2.2.2 关系数据语言的分类

特点:
- 关系语言是一种高度非过程化的语言,存取路径的选择由
DBMS的优化机制来完成,用户不必用循环结构就可以完成数据操作。 - 能够嵌入高级语言中使用。
- 关系代数、元组关系演算和域关系演算三种语言在表达能力上完全等价。
2.3 关系的完整性
关系模型中有三类完整性约束:
-
实体完整性(entity integrity)
-
参照完整性(referential integrity)
-
用户定义的完整性(user-defined integrity)。
关系模型必须满足实体完整性和参照完整性,被称作是关系的两个不变性,应该由关系系统自动支持。
用户定义的完整性是应用领域需要遵循的约束条件,体现了具体领域中的语义约束。
2.3.1 实体完整性
- 若属性(指一个或一组属性) A A A 是基本关系 R R R 的主属性,则 A A A 不能取空值(null value)。
- 所谓空值就是“不知道”或“不存在”或“无意义”的值。
原因:
- 实体完整性规则是针对基本关系而言的。一个基本表通常对应现实世界的一个实体集。
- 现实世界中的实体是可区分的,即它们具有某种唯一性标识。
- 关系模型中以主码作为唯一性标识。
- 主码中的属性即主属性不能取空值。主属性取空值,就说明存在某个不可标识的实体,即存在不可区分的实体,这与第(2)点相矛盾,因此这个规则称为实体完整性。
2.3.2 参照完整性
外码:
- 设 F F F 是基本关系 R R R 的一个或一组属性,但不是关系 R R R 的码,
- 如果 F F F 与基本关系 S S S 的主码 K s K_s Ks 相对应,则称 F F F 是 R R R 的外码。
- 基本关系 R R R 称为参照关系(Referencing Relation)
- 基本关系 S S S 称为被参照关系(Referenced Relation)或目标关系(Target Relation)
关系 R R R 和 S S S 不一定是不同的关系,目标关系 S S S 的主码 K s K_s Ks 和参照关系的外码 F F F 必须定义在同一个(或一组)域上。
外码并不一定要与相应的主码同名;当外码与相应的主码属于不同关系时,往往取相同的名字,以便于识别。
参照完整性规则:
- 若属性(或属性组) F F F 是基本关系 R R R 的外码,它与基本关系 S S S 的主码 K K K 相对应(基本关系 R R R 和 S S S 不一定是不同的关系)
- 则对于
R
R
R 中每个元组在
F
F
F 上的值必须:
- 取空值( F F F 的每个属性值均为空值)
- 或等于 S S S 中某个元组的主码值
2.3.3 用户定义的完整性
- 用户定义的完整性是针对某一具体关系数据库的约束条件,反映某一具体应用所涉及的数据必须满足的语义要求。
- 关系模型应提供定义和检验这类完整性的机制,以便用统一的系统的方法处理它们,而不要由应用程序承担这一功能。
2.4 关系代数
关系代数是一种抽象的查询语言,它用对关系的运算来表达查询。
运算具备以下要偶素:
- 运算对象
- 运算符
- 运算结果
任何一种运算都是将一定的运算符作用于一定的运算对象上,得到预期的运算结果。
关系代数的运算对象是关系,运算结果亦为关系。关系代数用到的运算符包括两类:
- 集合运算符
- 专门的关系运算符

2.4.1 传统的集合运算
传统的集合运算是二目运算,包括并、差、交、笛卡儿积4种运算。
设关系 R R R 和关系 S S S 具有相同的目(即两个关系都有 n n n 个属性),且相应的属性取自同一个域, t t t 是元组变量, t ∈ R t \in R t∈R 表示 t t t 是 R R R 的一个元组。可以定义并、差、交、笛卡儿积运算如下:
- 并(union):
- 关系 R R R 与关系 S S S 的并记作: R ∪ S = { t ∣ t ∈ R ∧ t ∈ S } R \cup S = \{t |t \in R \land t \in S \} R∪S={t∣t∈R∧t∈S}
- 其结果仍为 n n n 目关系,由属于 R R R 或属于 S S S 的元组组成。
- 差(except):
- 关系 R R R 与关系 S S S 的差记作: R − S = { t ∣ t ∈ R ∧ t ∉ S } R - S = \{ t | t \in R \land t \notin S \} R−S={t∣t∈R∧t∈/S}
- 其结果关系仍为 n n n 目关系,由属于 R R R 而不属于 S S S 的所有元组组成。
- 交(intersection):
- 关系 R R R 与关系 S S S 的交记作 R ∩ S = { t ∣ t ∈ R ∧ t ∈ S } R \cap S = \{ t | t \in R \land t \in S \} R∩S={t∣t∈R∧t∈S}
- 其结果关系仍为 n n n 目关系,由既属于 R R R 又属于 S S S 的元组组成。
- 关系的交可以用差来表示,即 R ∩ S = R − ( R − S ) R \cap S = R - ( R - S ) R∩S=R−(R−S) 。
- 笛卡儿积(cartesian product):
- 这里笛卡儿积的元素是元组。
- 两个分别为 n n n 目和 m m m 目的关系 R R R 和 S S S 的笛卡儿积是一个 ( n + m ) (n + m) (n+m) 列的元组的集合。元组的前 n n n 列是关系 R R R 的一个元组,后 m m m 列是关系 S S S 的一个元组。
- 若 R R R 有个元组, S S S 有 2 2 2 个元组,则关系 R R R 和关系 S S S 的笛卡儿积有 k 1 × k 2 k_1 \times k_2 k1×k2 个元组。记作 R × S = { t r t s ⌢ ∣ t r ∈ R ∧ t s ∈ S } R \times S = \{\overset{\frown}{t_r t_s} | t_r \in R \land t_s \in S \} R×S={trts⌢∣tr∈R∧ts∈S}

2.4.2 专门的关系运算
专门的关系运算包括选择、投影、连接、除运算等。为了叙述上的方便,先引入几个记号:
-
R
R
R,
t
∈
R
t \in R
t∈R,
t
[
A
i
]
t[A_i]
t[Ai]
- 设关系模式为 R ( A 1 , A 2 , … , A n ) R(A_1, A_2, \dots , A_n) R(A1,A2,…,An)
- 它的一个关系设为 R R R
- t ∈ R t \in R t∈R 表示 t t t 是 R R R 的一个元组
- t [ A i ] t[A_i] t[Ai] 表示元组 t t t 中相应于属性 A i A_i Ai 的一个分量
-
A
A
A,
t
[
A
]
t[A]
t[A],
A
‾
\overline{A}
A
- 若 A = { A i 1 , A i 2 , … , A i k } A = \{ A_{i1}, A_{i2}, \dots , A_{ik} \} A={Ai1,Ai2,…,Aik},其中 A i 1 , A i 2 , … , A i k A_{i1}, A_{i2}, \dots , A_{ik} Ai1,Ai2,…,Aik 是 A 1 , A 2 , … , A n A_1, A_2, \dots , A_n A1,A2,…,An 中的一部分,则 A A A 被称为属性列或属性组。
- t [ A ] = ( t [ A i 1 ] , t [ A i 2 ] , … , t [ A i k ] ) t[A] = (t[A_{i1}], t[A_{i2}], \dots , t[A_{ik}]) t[A]=(t[Ai1],t[Ai2],…,t[Aik]) 表示元组 t t t 在属性列 A A A 上诸分量的集合。
- A ‾ \overline{A} A 则表示 { A 1 , A 2 , … , A n } \{ A_1, A_2, \dots , A_n \} {A1,A2,…,An} 中去掉 A i 1 , A i 2 , … , A i k A_{i1}, A_{i2}, \dots , A_{ik} Ai1,Ai2,…,Aik 后剩余的属性组。
-
t
r
t
s
⌢
\overset{\frown}{t_r t_s}
trts⌢
- R R R 为 n n n 目关系, S S S 为 m m m 目关系
- t r ∈ R t_r \in R tr∈R, t s ∈ S t_s \in S ts∈S, t r t s ⌢ \overset{\frown}{t_r t_s} trts⌢ 称为元组的连接
- t r t s ⌢ \overset{\frown}{t_r t_s} trts⌢ 是一个 n + m n + m n+m 列的元组,前 n n n 个分量为 R R R 中的一个 n n n 元组,后 m m m 个分量为 S S S 中的一个 m m m 元组
- 象集
Z
x
Z_x
Zx
- 给定一个关系 R ( X , Z ) R(X, Z) R(X,Z), X X X 和 Z Z Z 为属性组
- 当 t [ X ] = x t[X] = x t[X]=x 时, x x x 在 R R R 中的象集(Images Set) 为: Z x = { t [ Z ] ∣ t ∈ R , t [ X ] = x } Z_x = \{ t[Z] | t\in R, t[X] = x \} Zx={t[Z]∣t∈R,t[X]=x}
- 它表示 R R R 中属性组 X X X 上值为 x x x 的诸元组在 Z Z Z 上分量的集合。
选择
- 选择又称为限制(Restriction)
- 选择运算符的含义:
- 在关系R中选择满足给定条件的诸元组
- σ F ( R ) = { t ∣ t ∈ R ∧ F ( t ) = ‘ t r u e ′ } \sigma_F(R) = \{ t | t \in R \land F(t) = `true' \} σF(R)={t∣t∈R∧F(t)=‘true′}
- F F F:选择条件,是一个逻辑表达式,取值为“真”或“假”
- 基本形式为: X 1 θ Y 1 X_1 \theta Y_1 X1θY1
- θ \theta θ 表示比较运算符,它可以是 > , ≥ , < , ≤ , = , ≠ \gt, \ge, \lt, \le, =, \ne >,≥,<,≤,=,=。
- X 1 , Y 1 X_1, Y_1 X1,Y1 等是属性名、常量、简单函数;属性名也可以用它的序号来代替;
- 在基本的选择条件上可以进一步进行逻辑运算,求非 ,与,或运算。

投影
- 从 R R R 中选择出若干属性列组成新的关系
- Π A ( R ) = { t [ A ] ∣ t ∈ R } \Pi_A(R) = \{ t[A] | t \in R \} ΠA(R)={t[A]∣t∈R}
- A A A : R R R 中的属性
- 投影操作主要是从列的角度进行运算
- 投影之后不仅取消了原关系中的某些列,而且还可能取消某些元组(避免重复行)

连接
- 连接也称为 θ \theta θ 连接
- 连接运算的含义:
- 从两个关系的笛卡尔积中选取属性间满足一定条件的元组
- R ⋈ A θ B S = { t r t s ⌢ ∣ t r ∈ R ∧ t s ∈ S ∧ t r [ A ] θ t s [ B ] } R \underset{A \theta B}{\bowtie} S = \{ \overset{\frown}{t_r t_s} | t_r \in R \land t_s \in S \land t_r[A] \theta t_s[B] \} RAθB⋈S={trts⌢∣tr∈R∧ts∈S∧tr[A]θts[B]}
- A A A 和 B B B :分别为 R R R 和 S S S 上度数相等且可比的属性组
- 连接运算从 R R R 和 S S S 的广义笛卡尔积 R × S R \times S R×S 中选取 R R R 关系在 A A A 属性组上的值与 S S S 关系在 B B B 属性组上的值满足比较关系 θ \theta θ 的元组
两类常用连接运算:
- 等值连接(equijoin):
- θ \theta θ 为 = = = 的运算
- 从关系 R R R 与 S S S 的广义笛卡尔积中选取 A , B A,B A,B 属性值相等的那些元组
- R ⋈ A = B S = { t r t s ⌢ ∣ t r ∈ R ∧ t s ∈ S ∧ t r [ A ] θ t s [ B ] } R \underset{A = B}{\bowtie} S = \{ \overset{\frown}{t_r t_s} | t_r \in R \land t_s \in S \land t_r[A] \theta t_s[B] \} RA=B⋈S={trts⌢∣tr∈R∧ts∈S∧tr[A]θts[B]}
- 自然连接(natural join):
- 自然连接是一种特殊的等值连接:
- 两个关系中进行比较的分量必须是相同的属性组
- 在结果中把重复的属性列去掉
- 自然连接的含义:
- R R R 和 S S S 具有相同的属性组 B B B
- R ⋈ S = { t r t s ⌢ [ U − B ] ∣ t r ∈ R ∧ t s ∈ S ∧ t r [ B ] = t s [ B ] } R \bowtie S = \{ \overset{\frown}{t_r t_s} [U-B] | t_r \in R \land t_s \in S \land t_r[B] = t_s[B] \} R⋈S={trts⌢[U−B]∣tr∈R∧ts∈S∧tr[B]=ts[B]}
- 自然连接是一种特殊的等值连接:
一般的连接操作是从行的角度进行运算。

自然连接还需要取消重复列,所以是同时从行和列的角度进行运算。
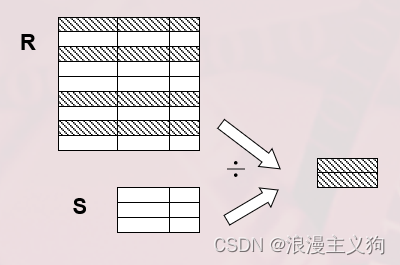
除运算
- 给定关系 R ( X , Y ) R(X, Y) R(X,Y) 和 S ( Y , Z ) S(Y, Z) S(Y,Z),其中 X , Y , Z X, Y, Z X,Y,Z 为属性组。
- R R R 中的 Y Y Y 与 S S S 中的 Y Y Y 可以有不同的属性名,但必须出自相同的域集。
- R R R 与 S S S 的除运算得到一个新的关系 P ( X ) P(X) P(X)
-
P
P
P 是
R
R
R 中满足下列条件的元组在
X
X
X 属性列上的投影:
- 元组在 X X X 上分量值 x x x 的象集 Y x Y_x Yx 包含 S S S 在 Y Y Y 上投影的集合
- R ÷ S = { t r [ X ] ∣ t r ∈ R ∧ Π Y ( S ) ⊆ Y x } R \div S = \{ t_r[X] | t_r \in R \land \Pi_Y(S) \subseteq Y_x \} R÷S={tr[X]∣tr∈R∧ΠY(S)⊆Yx}
- Y x Y_x Yx : x x x 在 R R R 中的象集, x = t r [ X ] x = t_r[X] x=tr[X]
除操作是同时从行和列角度进行运算
![[visual studio]中,关于如何 【调试】 的问题 及 技巧](https://img-blog.csdnimg.cn/53a204b4930048f0bba9157ec670403d.png)