1:经典的边界检测方法有sobel,拉普拉斯,canny等。
sobel:
def get_sobel(in_chan, out_chan):
filter_x = np.array([
[1, 0, -1],
[2, 0, -2],
[1, 0, -1],
]).astype(np.float32)
filter_y = np.array([
[1, 2, 1],
[0, 0, 0],
[-1, -2, -1],
]).astype(np.float32)
filter_x = filter_x.reshape((1, 1, 3, 3))
filter_x = np.repeat(filter_x, in_chan, axis=1)
filter_x = np.repeat(filter_x, out_chan, axis=0)
filter_y = filter_y.reshape((1, 1, 3, 3))
filter_y = np.repeat(filter_y, in_chan, axis=1)
filter_y = np.repeat(filter_y, out_chan, axis=0)
filter_x = torch.from_numpy(filter_x)
filter_y = torch.from_numpy(filter_y)
filter_x = nn.Parameter(filter_x, requires_grad=False)
filter_y = nn.Parameter(filter_y, requires_grad=False)
conv_x = nn.Conv2d(in_chan, out_chan, kernel_size=3, stride=1, padding=1, bias=False)
conv_x.weight = filter_x
conv_y = nn.Conv2d(in_chan, out_chan, kernel_size=3, stride=1, padding=1, bias=False)
conv_y.weight = filter_y
sobel_x = nn.Sequential(conv_x, nn.BatchNorm2d(out_chan)) # 自定义修改卷积核的权重
sobel_y = nn.Sequential(conv_y, nn.BatchNorm2d(out_chan))
return sobel_x, sobel_y
def run_sobel(conv_x, conv_y, input):
g_x = conv_x(input) # (1,1,15,20)
g_y = conv_y(input) # (1,1,15,20)
g = torch.sqrt(torch.pow(g_x, 2) + torch.pow(g_y, 2) + 1e-6).clone()
return g
拉普拉斯:
self.laplacian_kernel = torch.tensor(
[-1, -1, -1, -1, 8, -1, -1, -1, -1],
dtype=torch.float32).reshape(1, 1, 3, 3).requires_grad_(False).type(torch.cuda.FloatTensor)
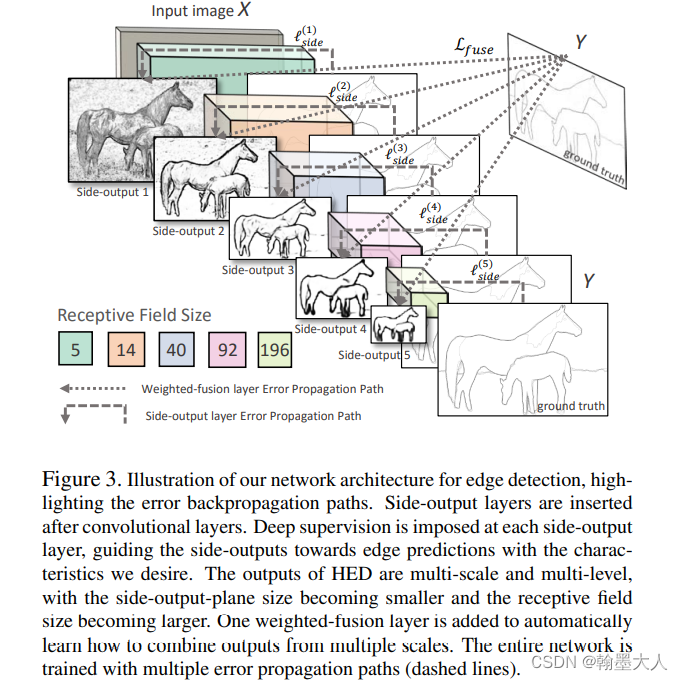
2:《Holistically-nested edge detection》,HED经典的采用CNN进行边缘检测,通过边界损失进行约束。
论文地址
backbone的每一个输出后接一个side_output,输出通道为1,上采样到原图大小,GT进过提取边界后与上采样的side_output进行损失计算。
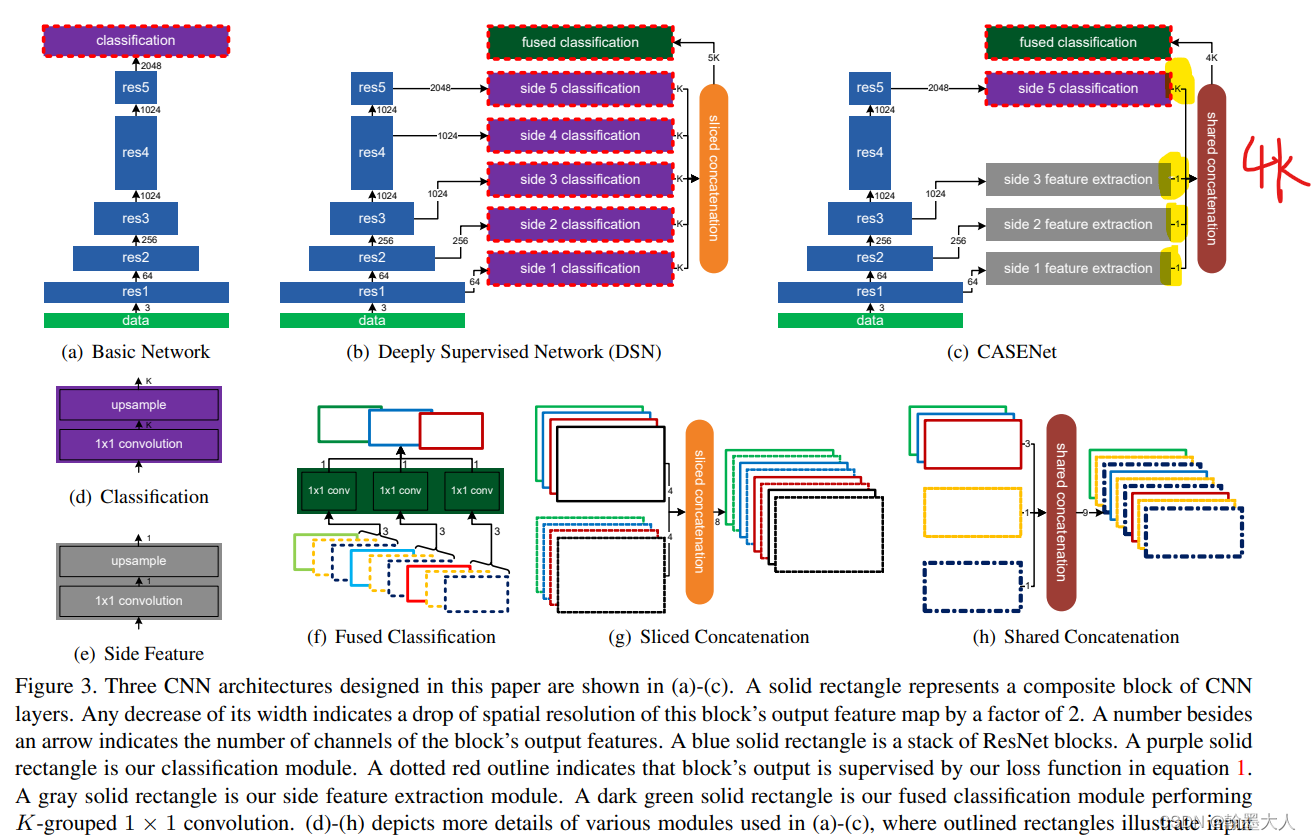
3:CASENet:CASENet: Deep Category-Aware Semantic Edge Detection
相比于多标签监督,CASENet采用了多类别即(category-aware)进行监督,考虑的是一个像素点可能同时属于多个类别,因此采用的不是one-hot编码,而是按RGB三通道的bit进行编码,在模型中前几个stage输出通道为1的边缘图,最后一个stage生成通道为num_class的特征图,然后通过slice_concat,将num_class的每一个通道与其他三个通道为1的特征图进行拼接,这样就有4num_class个通道,再经过融合层。
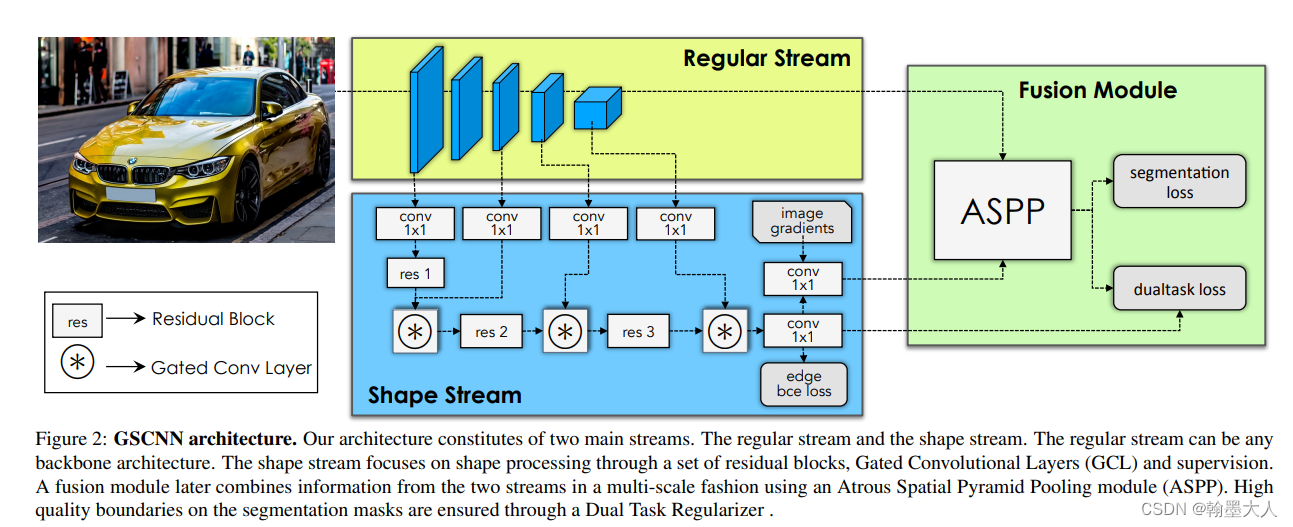
4:Gated-SCNN:Gated Shape CNNs for Semantic Segmentation
模型分为两条支路,regular stream和shape stream,shape stream只学习图像的shape信息,在shape分支通过edge bce loss进行约束,在regular通过segmentation loss进行约束。将第一个stage的输出,不断的和其他分支进行融合,最后输出通道为1的边界图,计算边界损失。和CASENet不同的是,每个side_output都不断地进行特征的交互。
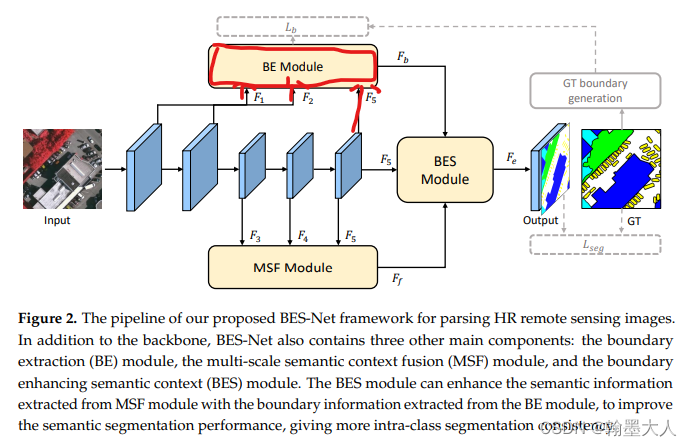
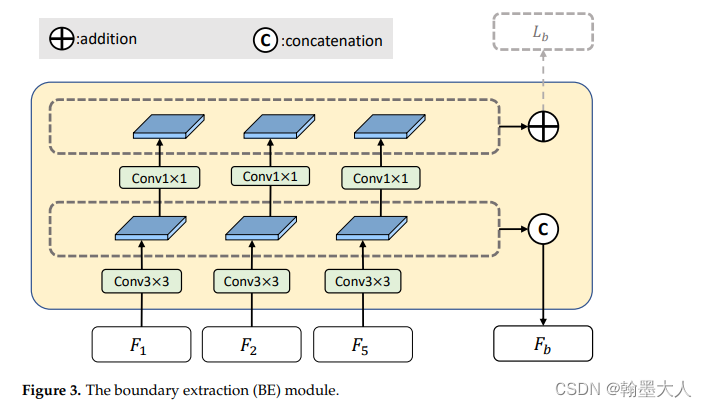
5:基于CASENet*的结构,有很多的应用,比如SwinNet,FusionNet,BES-Net等。
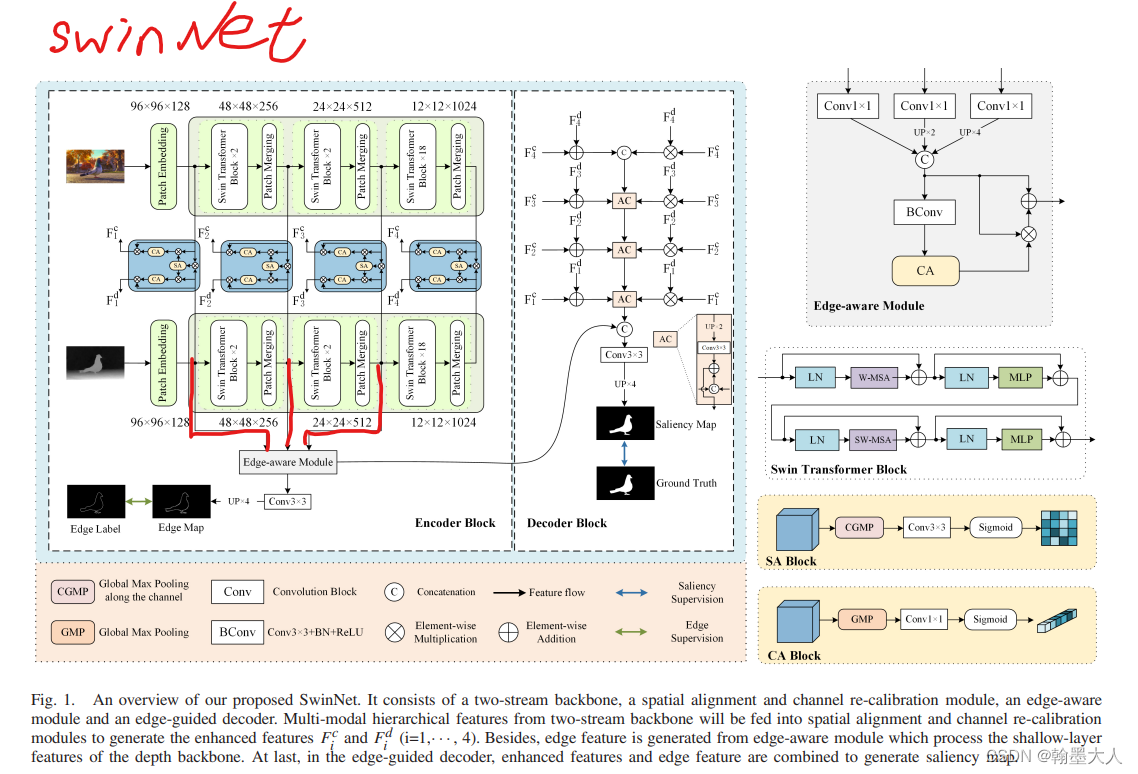
BES-Net: Boundary Enhancing Semantic Context Network for High-Resolution Image Semantic Segmentation和Pixel Difference Networks for Efficient Edge Detection
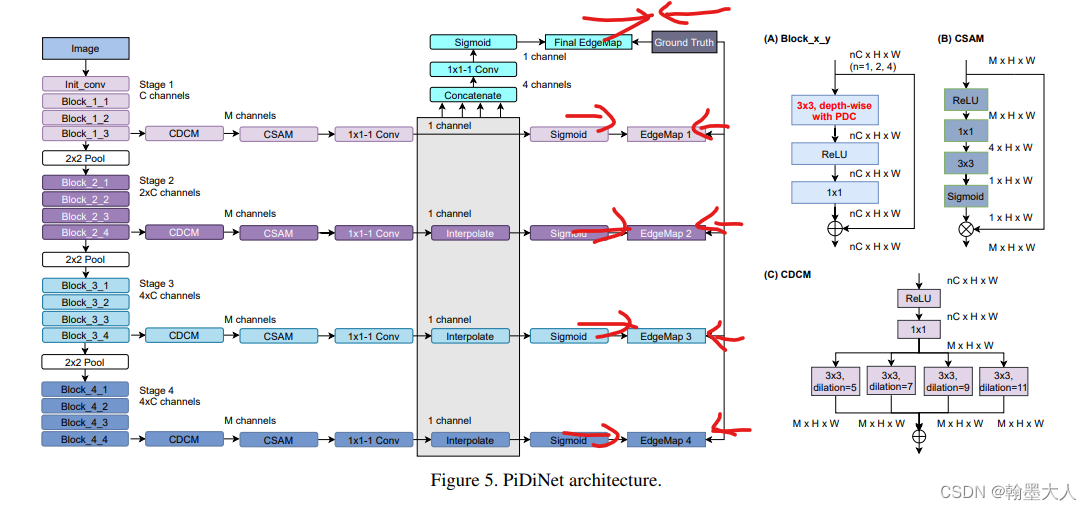
6:基于HED的有Pixel Difference Networks for Efficient Edge Detection:
Pixel Difference Networks for Efficient Edge Detection:
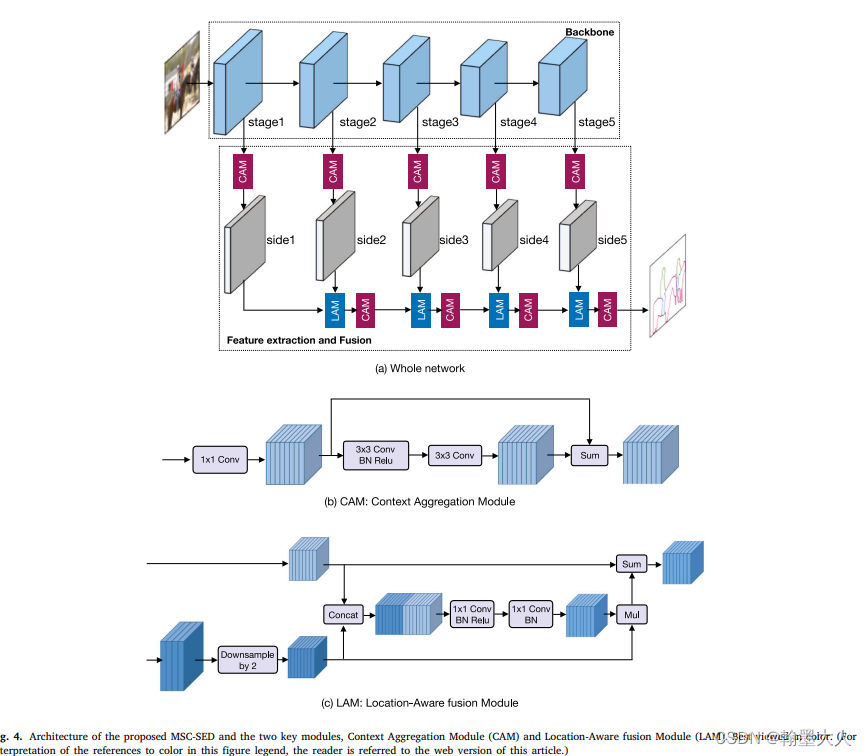
7:基于Gated-SCNN的有
Multi-scale spatial context-based semantic edge detection,通过CAM提取,通过LAM融合,其中LAM结构和Gated-SCNN的Gate-layer几乎一样。
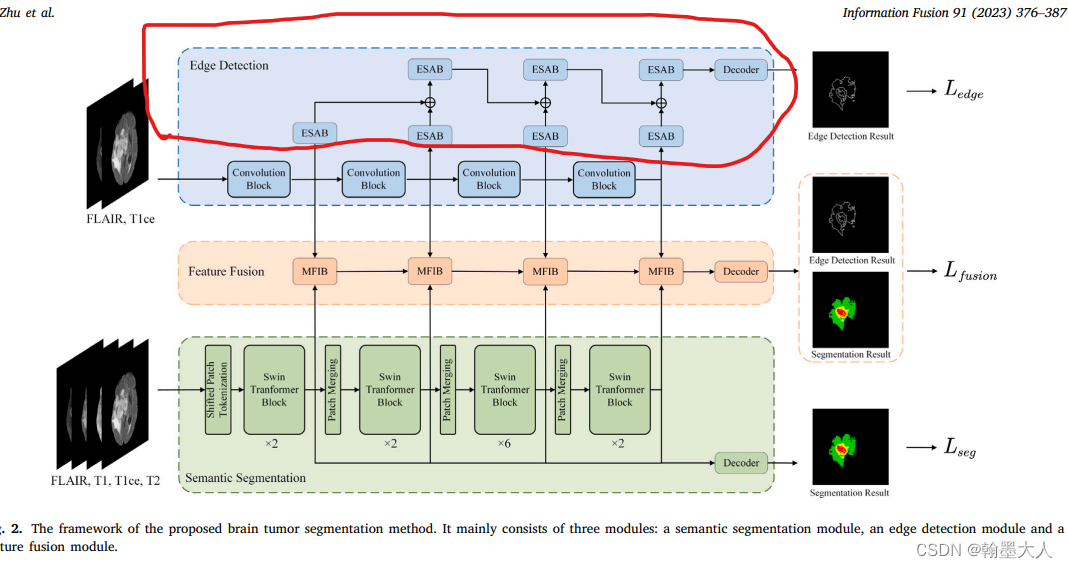
Brain tumor segmentation based on the fusion of deep semantics and edge information in multimodal MRI:
因为他图片是医学的核磁共振图像,对于图片的性质和特点不太理解。他结合了sobel和卷积进行边缘的提取。

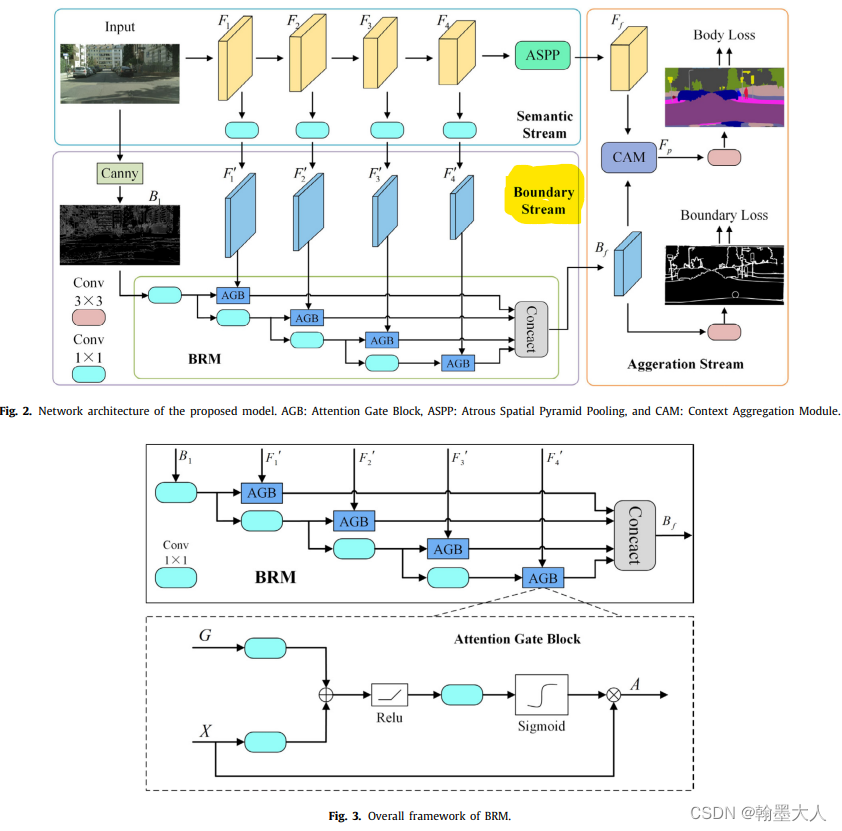
BASeg:也是两条分支,第二条分支开始是对RGB图进行Canny操作,然后和语义分支的每一个stage输出进行融合,最后和语义分支共同输入到CAM中,相当于边缘信息融合到语义信息中,使得最终的分割图可以有一个清晰的边缘。