图神经网络(GNN)目前的主流实现方式就是节点之间的信息汇聚,也就是类似于卷积网络的邻域加权和,比如图卷积网络(GCN)、图注意力网络(GAT)等。下面根据GCN的实现原理使用Pytorch张量,和调用torch_geometric包,分别对Cora数据集进行节点分类实验。
Cora是关于科学文献之间引用关系的图结构数据集。数据集包含一个图,图中包括2708篇文献(节点)和10556个引用关系(边)。其中每个节点都有一个1433维的特征向量,即文献内容的嵌入向量。文献被分为七个类别:计算机科学、物理学等。
GCN计算流程
对于某个GCN层,假设输入图的节点特征为$X\in R^{|V|\times F_{in}}$,边索引表示为序号数组$Ei\in R^{2\times |E|}$,GCN层输出$Y\in R^{|V|\times F_{out}}$。计算流程如下:
0、根据$Ei$获得邻接矩阵$A_0\in R^{|V|\times |V|}$。
1、为了将节点自身信息汇聚进去,每个节点添加指向自己的边,即 $A=A_0+I$,其中$I$为单位矩阵。
2、计算度(出或入)矩阵 $D$,其中 $D_{ii}=\sum_j A_{ij}$ 表示第 $i$ 个节点的度数。$D$为对角阵。
3、计算对称归一化矩阵 $\hat{D}$,其中 $\hat{D}_{ii}=1/\sqrt{D_{ii}}$。
4、构建对称归一化邻接矩阵 $\tilde{A}$,其中 $\tilde{A}= \hat{D} A \hat{D}$。
5、计算节点特征向量的线性变换,即 $Y = \tilde{A} X W$,其中 $X$ 表示输入的节点特征向量,$W\in R^{F_{in}\times F_{out}}$ 为GCN层中待训练的权重矩阵。
即:
$Y=D^{-0.5}(A_0+I)D^{-0.5}XW$
在torch_geometric包中,normalize参数控制是否使用度矩阵$D$归一化;cached控制是否缓存$D$,如果每次输入都是相同结构的图,则可以设置为True,即所谓转导学习(transductive learning)。另外,可以看到GCN的实现只考虑了节点的特征,没有考虑边的特征,仅仅通过聚合引入边的连接信息。
GCN实验
调包实现
Cora的图数据存放在torch_geometric的Data类中。Data主要包含节点特征$X\in R^{|V|\times F_v}$、边索引$Ei\in R^{2\times |E|}$、边特征$Ea\in R^{|E|\times F_e}$等变量。首先导出Cora数据:
from torch_geometric.datasets import Planetoid
cora = Planetoid(root='./data', name='Cora')[0]
print(cora)
构建GCN,训练并测试。
import torch
from torch import nn
from torch_geometric.nn import GCNConv
import torch.nn.functional as F
from torch.optim import Adam
class GCN(nn.Module):
def __init__(self, in_channels, hidden_channels, class_n):
super(GCN, self).__init__()
self.conv1 = GCNConv(in_channels, hidden_channels)
self.conv2 = GCNConv(hidden_channels, class_n)
def forward(self, x, edge_index):
x = torch.relu(self.conv1(x, edge_index))
x = torch.dropout(x, p=0.5, train=self.training)
x = self.conv2(x, edge_index)
return torch.log_softmax(x, dim=1)
model = GCN(cora.num_features, 16, cora.y.unique().shape[0]).to('cuda')
opt = Adam(model.parameters(), 0.01, weight_decay=5e-4)
def train(its):
model.train()
for i in range(its):
y = model(cora.x, cora.edge_index)
loss = F.nll_loss(y[cora.train_mask], cora.y[cora.train_mask])
loss.backward()
opt.step()
opt.zero_grad()
def test():
model.eval()
y = model(cora.x, cora.edge_index)
right_n = torch.argmax(y[cora.test_mask], 1) == cora.y[cora.test_mask]
acc = right_n.sum()/cora.test_mask.sum()
print("Acc: ", acc)
for i in range(15):
train(1)
test()
仅15次迭代就收敛,测试精度如下:

张量实现
主要区别就是自定义一个My_GCNConv来代替GCNConv,My_GCNConv定义如下:
from torch import nn
from torch_geometric.utils import to_dense_adj
class My_GCNConv(nn.Module):
def __init__(self, in_channels, out_channels):
super(My_GCNConv, self).__init__()
self.weight = torch.nn.Parameter(nn.init.xavier_normal(torch.zeros(in_channels, out_channels)))
self.bias = torch.nn.Parameter(torch.zeros([out_channels]))
def forward(self, x, edge_index):
adj = to_dense_adj(edge_index)[0]
adj += torch.eye(x.shape[0]).to(adj)
dgr = torch.diag(adj.sum(1)**-0.5)
y = torch.matmul(dgr, adj)
y = torch.matmul(y, dgr)
y = torch.matmul(y, x)
y = torch.matmul(y, self.weight) + self.bias
return y
其它代码仅将GCNConv修改为My_GCNConv。
对比实验
MLP实现
下面不使用节点之间的引用关系,仅使用节点特征向量在MLP中进行实验,来验证GCN的有效性。
import torch
from torch import nn
import torch.nn.functional as F
from torch.optim import Adam
class MLP(nn.Module):
def __init__(self, in_channels, hidden_channels, class_n):
super(MLP, self).__init__()
self.l1 = nn.Linear(in_channels, hidden_channels)
self.l2 = nn.Linear(hidden_channels, hidden_channels)
self.l3 = nn.Linear(hidden_channels, class_n)
def forward(self, x):
x = torch.relu(self.l1(x))
x = torch.relu(self.l2(x))
x = torch.dropout(x, p=0.5, train=self.training)
x = self.l3(x)
return torch.log_softmax(x, dim=1)
model = MLP(cora.num_features, 512, cora.y.unique().shape[0]).to('cuda')
opt = Adam(model.parameters(), 0.01, weight_decay=5e-4)
def train(its):
model.train()
for i in range(its):
y = model(cora.x[cora.train_mask])
loss = F.nll_loss(y, cora.y[cora.train_mask])
loss.backward()
opt.step()
opt.zero_grad()
def test():
model.eval()
y = model(cora.x[cora.test_mask])
right_n = torch.argmax(y, 1) == cora.y[cora.test_mask]
acc = right_n.sum()/cora.test_mask.sum()
print("Acc: ", acc)
for i in range(15):
train(30)
test()
可以看出MLP包含了3层,并且隐层参数比GCN多得多。结果如下:
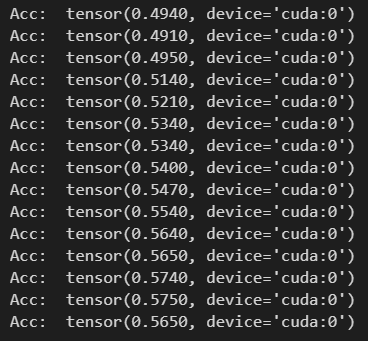
精度收敛在57%左右,效果比GCN的79%差。说明节点之间的链接关系对节点类别的划分有促进作用,以及GCN的有效性。