首先介绍下LEO和HW
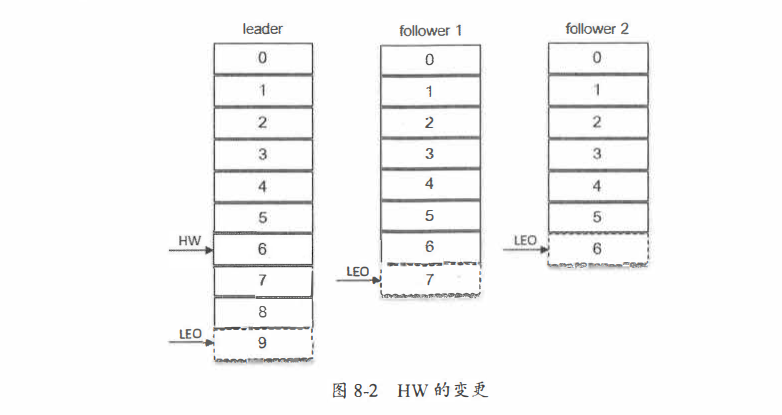
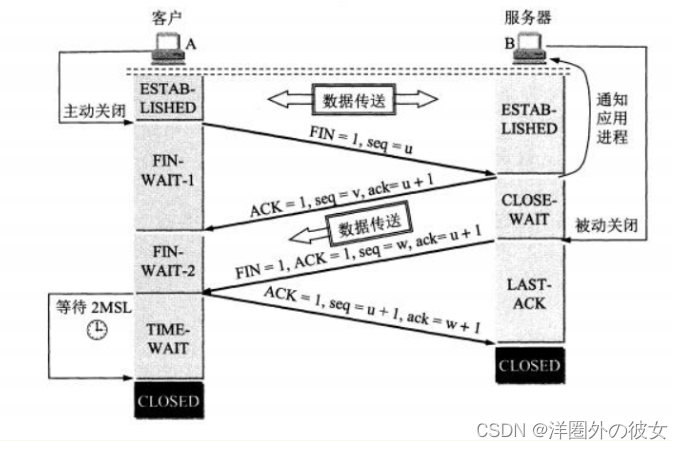
LEO: 即LogEndOffset,表示该副本下次日志记录的偏移量
HW:即HighWatermark,高水位线,是所有ISR副本集合中的LEO最小值
上图中,如果此时三个副本都在ISR集合中,那么此时他们的LEO,分别为9,7,6 ,而HW则为6,只有在HW之前的消息才是消费者可见的
Kafka消息的整个追加过程可以概括如下
生产者客户端发送消息至Leader副本
消息被追加到leader副本的本地日志,并且会更新日志的偏移量即LEO
follower副本向leader副本请求同步数据
leader副本所在的服务器读取本地日志,并更新对应拉取的follower副本的信息
leader副本所在的服务器将拉取结果返回给follower副本
fllower副本收到leader副本返回的拉取结果,将消息追加到本地日志中,并更新日志的偏移量信息
这个过程中,我们分析下LEO和HW的变化
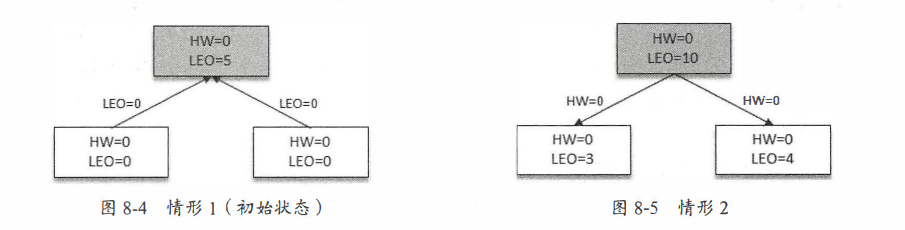
现在,生产者一直往leader(带阴影的方框)写入消息,某一时刻,leader的LEO增加至5,并且所有副本的HW都还为0
之后fllower副本(不带阴影的方框)向leader拉取消息,在拉取的请求中会带有自身的LEO信息,这个LEO信息对应的是FetchRequest请求中的fetch_offset。
leader副本返回给follower副本相应的消息,并且还带有自身的HW信息,如图8-5,这个HW信息对应的是FetchResponse中的high_watermark
此时两个follower副本各自拉取到了消息,并且更新各自的LEO为3 和4 。同时,follower副本还会更新自己的HW,更新HW的算法是比较当前LEO和leader副本中传送过来的HW的值,取最小值作为自己的HW值。当前两个follower副本的HW都为0.
接下来,follower副本再次请求拉取leader副本中的消息
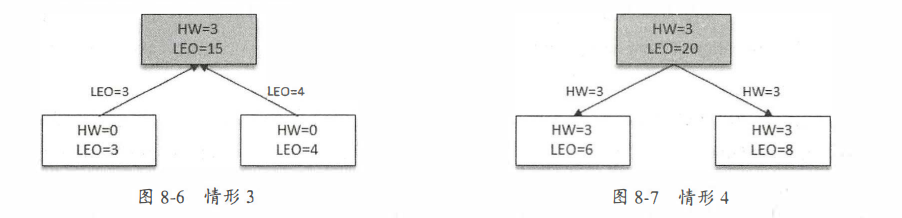
此时leader副本收到follower副本的FetchREquest请求,其中带有LEO的相关信息,选取其中最小值作为新的HW,即3 ,然后连同消息和HW一起返回FetchResponse给follower,如图8-7,注意leader副本的HW是一个很重要的东西,它直接影响了分区数据对消费者的可见性。
两个follower收到新的消息后更新LEO并更新自己的HW为3,去leader HW和自身LEO的最小值。
在一个分区中,leader副本所在的节点会记录所有副本的LEO,而follower副本所在的节点只会记录自身的LEO,而不会记录其他副本的LEO。对HW而言,各个副本所在的节点都只记录自身的HW。
ISR : 分区中的所有副本统称为AR,而ISR是指与leader副本保持同步状态的副本集合,当然leader副本本身也是这个集合中的一员。如果副本将leader副本LEO之前的日志全部同步时,则认为该副本已经追上了leader副本,此时更新该副本的lastCaughtUpTimeMs标识,kafka的副本管理器会启动一个副本过期的定时检测任务,如果当前时间与副本的lastCaughtUpTimeMs标识差值是否大于参数replica.lag.time.max.ms,如果大于则会判断为失效副本,被踢出ISR集合,还有个就是如果副本滞后的消息大小超过replica.lag.max.messages时,也会判断为失效副本





![[ vulhub漏洞复现篇 ] Drupal<7.32 Drupalgeddon SQL注入漏洞(CVE-2014-3704)](https://img-blog.csdnimg.cn/3792ab15b4b54efd8da923c1e9374b55.png)