ESP-C3入门10. 创建TCP Client
- 一、创建 tcp client的一般步骤
- 1. 创建 tcp 套接字
- 2. 配置服务器地址
- 3. 连接服务器
- 4. 发送数据
- 5. 接收数据
- 6. 关闭套接字
- 二、创建tcp_client任务
- 三、示例代码
- 1. tcpClient.h
- 2. tcpClient.c
- 3. main.c

一、创建 tcp client的一般步骤
本文示例使用的是阻塞IO进行网络通讯。 在高性能的网络编程中,可能会使用非阻塞IO或异步IO进行网络通讯。
1. 创建 tcp 套接字
使用 socket函数:
int sock = socket(AF_INET, SOCK_STREAM, IPPROTO_IP);
2. 配置服务器地址
struct sockaddr_in server_addr;
server_addr.sin_family = AF_INET;
server_addr.sin_port = htons(server_port);
inet_pton(AF_INET, server_ip, &server_addr.sin_addr);
3. 连接服务器
int ret = connect(sock, (struct sockaddr *)&server_addr, sizeof(server_addr));
if (ret != 0) {
ESP_LOGE(TAG, "Failed to connect to server, errno=%d", errno);
close(sock);
return;
}
4. 发送数据
int bytes_sent = send(sock, send_buf, send_len, 0);
if (bytes_sent < 0) {
ESP_LOGE(TAG, "Failed to send data to server, errno=%d", errno);
close(sock);
return;
}
5. 接收数据
// 接收数据
int bytes_recv = recv(sock, recv_buf, recv_buf_size, 0);
if (bytes_recv < 0) {
ESP_LOGE(TAG, "Failed to receive data from server, errno=%d", errno);
close(sock);
return;
}
6. 关闭套接字
close(sock);
二、创建tcp_client任务
由于网络通信涉及到阻塞IO操作,如果在主线程中直接调用网络API,会导致主线程被阻塞,无法处理其他任务。为了避免这种情况发生,可以将网络通信放在RTOS任务中处理,使得主线程可以继续运行。
另外,使用RTOS任务的好处还在于可以方便地控制任务的优先级、堆栈大小等参数,以及在需要的时候暂停、恢复、删除任务等操作。这样可以更加灵活地管理程序中的各个任务,实现复杂的多任务协作。
示例使用 xTaskCreate函数创建freeRTOS的任务:
xTaskCreate(tcp_client_task, "tcp_client_task", 4096, NULL, 5, NULL);
任务优先级是5,栈大小是4096
定义连接tcp 的任务时,注意需要保留参数:
void tcp_client_task(void* pvParameters);
三、示例代码
本示例会接前面章节连接WIFI的部分,帮wifi.c wifi.h部分代码不重复编写 。
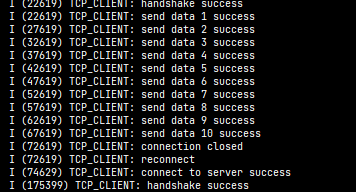
下面示例中,tcpClient连接上服务器后,会发送ping消息,并等待服务器回应。如果服务器回应pong,则握手成功, 客户端继续发送10个报文, 然后关闭连接,重新请求连接服务端。
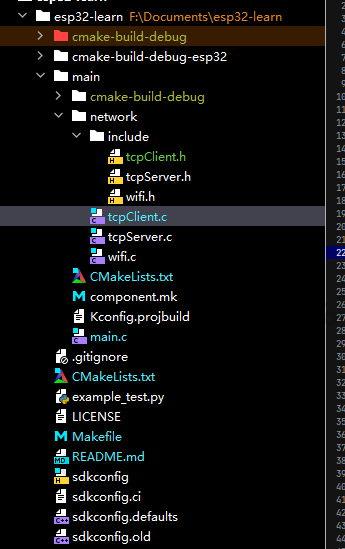
参考项目目录结构如下:
1. tcpClient.h
//
// Created by hs26661 on 2023/2/16.
//
#ifndef ESP32_LEARN_TCPCLIENT_H
#define ESP32_LEARN_TCPCLIENT_H
#include <string.h>
#include <sys/socket.h>
#include <netdb.h>
#include <unistd.h>
void tcp_client_task(void* pvParameters);
#endif //ESP32_LEARN_TCPCLIENT_H
2. tcpClient.c
//
// Created by hs26661 on 2023/2/16.
//
#include <lwip/sockets.h>
#include <esp_log.h>
#define SERVER_HOST "192.18.200.28"
#define SERVER_PORT 3000
#define MESSAGE "ping"
#define MAX_RETRY 5 // 最大重试次数
#define DATA_SIZE 256 // 数据包大小
static const char *TAG = "TCP_CLIENT";
/**
* 创建 freeRtos任务, 这里的参数注意不能删除
* @param pvParameters
*/
void tcp_client_task(void* pvParameters){
// 重试次数
int retry_count = 0;
// 接收缓冲区
char rx_buffer[DATA_SIZE];
// 发送缓冲区
char tx_buffer[DATA_SIZE];
while(1){
// 创建套接字
struct sockaddr_in dest_addr;
dest_addr.sin_addr.s_addr = inet_addr(SERVER_HOST);
dest_addr.sin_family = AF_INET;
dest_addr.sin_port = htons(SERVER_PORT);
int sock = socket(AF_INET, SOCK_STREAM, IPPROTO_IP);
// 连接服务端
int err = connect(sock, (struct sockaddr*) &dest_addr, sizeof(dest_addr));
if(err != 0){
if(retry_count++ >= MAX_RETRY){
ESP_LOGE(TAG, "connect failure retry limit");
break;
}
ESP_LOGW(TAG, "connect failure, retry count=%d", retry_count);
vTaskDelay(2000 / portTICK_PERIOD_MS);
continue;
}
ESP_LOGI(TAG, "connect to server success");
retry_count = 0;
// 发送ping
int tx_len = sprintf(tx_buffer, MESSAGE);
err = send(sock, tx_buffer, tx_len, 0);
if(err <0){
ESP_LOGE(TAG, "send ping failure");
close(sock);
continue;
}
// 接收pong
int rx_len = recv(sock,rx_buffer, sizeof(rx_buffer) -1, 0);
if(rx_len<0){
ESP_LOGE(TAG, "receive pong failure");
close(sock);
continue;
}
rx_buffer[rx_len] = 0;
if(strcmp(rx_buffer, "pong") !=0){
ESP_LOGE(TAG, "handshake failure");
close(sock);
continue;
}
ESP_LOGI(TAG, "handshake success");
// 发送数据包
for(int i =0;i<10;i++){
// 获取当前时间字符串
time_t now = time(NULL);
struct tm timeinfo;
localtime_r(&now, &timeinfo);
char strftime_buf[64];
strftime(strftime_buf , sizeof(strftime_buf), "%c", &timeinfo);
// 发送数据包
tx_len = sprintf(tx_buffer, "time:%s", strftime_buf);
err = send(sock, tx_buffer, tx_len, 0);
if(err <0){
ESP_LOGE(TAG, "send data error");
close(sock);
break;
}
ESP_LOGI(TAG, "send data %d success", i+1);
// 5秒后再发送
vTaskDelay(5000 / portTICK_PERIOD_MS);
}
// 发送bye
tx_len = sprintf(tx_buffer, "bye");
err = send(sock, tx_buffer, tx_len, 0);
if(err<0){
ESP_LOGE(TAG, "send bye error");
close(sock);
continue;
}
// 关闭连接
close(sock);
ESP_LOGI(TAG, "connection closed");
// 重建 连接
ESP_LOGI(TAG, "reconnect");
vTaskDelay(2000/ portTICK_PERIOD_MS);
}
vTaskDelete(NULL);
}
3. main.c
#include <string.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include <nvs_flash.h>
#include "network/include/wifi.h"
#include "network/include/tcpClient.h"
static const char *TAG = "wifi connection";
void app_main()
{
int i = 0;
ESP_LOGE(TAG, "app_main");
// 初始化NVS存储区
esp_err_t ret = nvs_flash_init();
if (ret == ESP_ERR_NVS_NO_FREE_PAGES || ret == ESP_ERR_NVS_NEW_VERSION_FOUND) {
ESP_ERROR_CHECK(nvs_flash_erase());
ret = nvs_flash_init();
}
ESP_ERROR_CHECK(ret);
// Wi-Fi初始化
ESP_LOGI(TAG, "Wi-Fi initialization");
wifi_initialize();
// Wi-Fi Station初始化
wifi_station_initialize();
// 创建 tcp client任务,优先级为5,栈大小为4096
xTaskCreate(tcp_client_task, "tcp_client_task", 4096, NULL, 5, NULL);
while (1) {
vTaskDelay(pdMS_TO_TICKS(500));
}
}
运行结果:
示例中使用阻塞IO通讯,也可以将收发放在不同的任务中执行,这样提高程序并发性;在这种情况下,可以创建两个套接字并使用同一服务器地址和端口号。在发送和接收数据时,将不同的套接字分别用于不同的任务,从而实现并发的发送和接收。
具体来说,在两个任务中,需要使用不同的套接字句柄(socket handle)来访问相同的服务器地址和端口。在每个任务中,可以通过调用 socket()、connect() 和 close() 等函数来创建和管理套接字。发送和接收数据时,需要在每个任务中使用不同的套接字句柄来分别发送和接收数据。
需要注意的是,如果两个任务共用同一套接字句柄来进行发送和接收,那么就可能会出现竞争条件,导致数据错误或不完整。因此,为了避免这种情况,最好在每个任务中分别使用独立的套接字来进行通信。
本文不演示上述方案。