1、实现代码:
stm32f4xx_hal_conf.h文件开启UART宏定义
#define HAL_UART_MODULE_ENABLED
添加stm32f4xx_hal_uart.c和stm32f4xx_hal_dma.c到自己工程;
编写好的代码:usart_Driver.c
/**********************************************************************
*file:串口驱动
*author:残梦
*date:2023.2.13
*note:
**********************************************************************/
#include "usart_Driver.h"
#define UART1_BAUDRATE 2000000 //波特率
#define UART1_RX_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE()
#define UART1_RX_GPIO_PORT GPIOA
#define UART1_RX_GPIO_PIN GPIO_PIN_10
#define UART1_RX_AF GPIO_AF7_USART1
#define UART1_TX_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE()
#define UART1_TX_GPIO_PORT GPIOA
#define UART1_TX_GPIO_PIN GPIO_PIN_9
#define UART1_TX_AF GPIO_AF7_USART1
UART_HandleTypeDef huart1;
#ifndef _UART1_RX_MODE
DMA_HandleTypeDef hdma_usart1_rx;
#endif
uint8_t huart1_RxData[50] = {0};
/****************************************************
@function:串口1初始化
@param:void
@return:void
@date:2023.2.13
@note:
****************************************************/
void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = UART1_BAUDRATE;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if(HAL_UART_Init(&huart1) != HAL_OK){Error_Handler();}
#ifdef _UART1_RX_MODE
HAL_UART_Receive_IT(&huart1, huart1_RxData, sizeof(huart1_RxData));
#else
HAL_UART_Receive_DMA(&huart1,huart1_RxData,sizeof(huart1_RxData));
#endif
}
/****************************************************
@function:串口1
@param:void
@return:void
@date:2023.2.13
@note:
****************************************************/
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_USART1_CLK_ENABLE();
UART1_RX_GPIO_CLK_ENABLE();
UART1_TX_GPIO_CLK_ENABLE();
//外设引脚初始化
GPIO_InitStruct.Pin = UART1_RX_GPIO_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = UART1_RX_AF;
HAL_GPIO_Init(UART1_RX_GPIO_PORT, &GPIO_InitStruct);
GPIO_InitStruct.Pin = UART1_TX_GPIO_PIN;
GPIO_InitStruct.Alternate = UART1_TX_AF;
HAL_GPIO_Init(UART1_TX_GPIO_PORT, &GPIO_InitStruct);
#ifdef _UART1_RX_MODE
HAL_NVIC_SetPriority(USART1_IRQn,1,0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
#else
__HAL_RCC_DMA2_CLK_ENABLE();
hdma_usart1_rx.Instance = DMA2_Stream2;
hdma_usart1_rx.Init.Channel = DMA_CHANNEL_4;
hdma_usart1_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_usart1_rx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_usart1_rx.Init.MemInc = DMA_MINC_ENABLE;
hdma_usart1_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_usart1_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_usart1_rx.Init.Mode = DMA_CIRCULAR;
hdma_usart1_rx.Init.Priority = DMA_PRIORITY_LOW;
hdma_usart1_rx.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
hdma_usart1_rx.Init.FIFOThreshold = DMA_FIFO_THRESHOLD_1QUARTERFULL;
hdma_usart1_rx.Init.MemBurst = DMA_MBURST_SINGLE;
hdma_usart1_rx.Init.PeriphBurst = DMA_PBURST_SINGLE;
if(HAL_DMA_Init(&hdma_usart1_rx) != HAL_OK){Error_Handler();}
__HAL_LINKDMA(&huart1,hdmarx,hdma_usart1_rx);//关联DMA句柄
HAL_NVIC_SetPriority(DMA2_Stream2_IRQn,0,0);
HAL_NVIC_EnableIRQ(DMA2_Stream2_IRQn);
#endif
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
HAL_UART_Transmit(&huart1,huart1_RxData,sizeof(huart1_RxData),10);//自收自发
#ifdef _UART1_RX_MODE
HAL_UART_Receive_IT(&huart1, huart1_RxData, sizeof(huart1_RxData));//中断方式接收则需开启,否则会导致接收完指定数据个数后自动关闭
#endif
}
usart_Driver.h
#ifndef _usart_Driver_H_
#define _usart_Driver_H_
#include "Common_Driver.h"
//#define _UART1_RX_MODE //未定义--DMA方式接收,定义--中断接收方式
extern UART_HandleTypeDef huart1;
extern void MX_USART1_UART_Init(void);
#endif
在stm32f4xx_it.c文件中添加中断处理函数:
/* USER CODE BEGIN 1 */
#include "usart_driver.h"
#ifdef _UART1_RX_MODE
void USART1_IRQHandler(void)
{
extern UART_HandleTypeDef huart1;
HAL_UART_IRQHandler(&huart1);
}
#else
void DMA2_Stream2_IRQHandler(void)
{
extern DMA_HandleTypeDef hdma_usart1_rx;
HAL_DMA_IRQHandler(&hdma_usart1_rx);
}
#endif
/* USER CODE END 1 */
```c
/****************************************************
@function:串口重定义
@param:void
@return:void
@date:2023.2.14
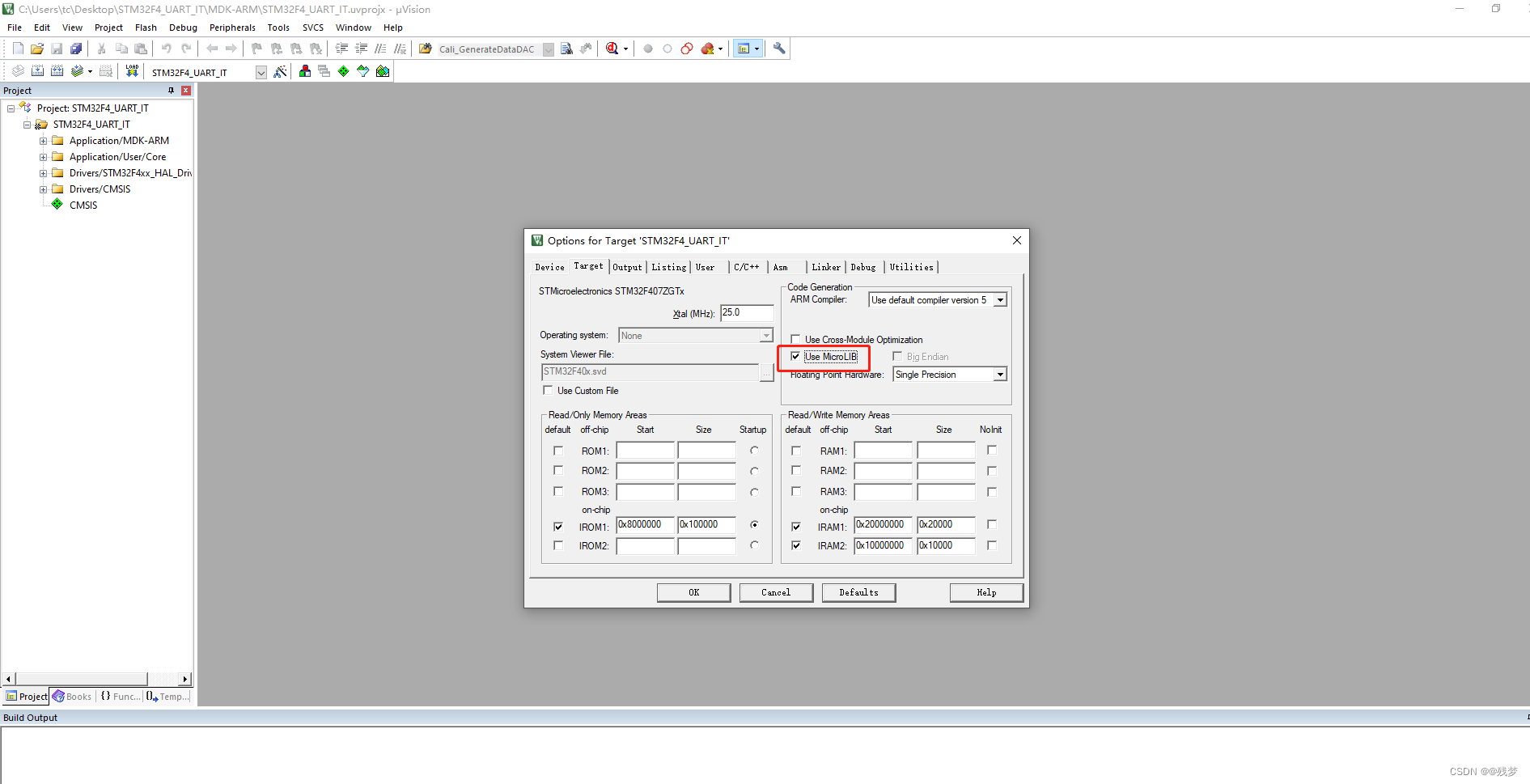
@note:使用printf时需要此函数,并在Keil魔术棒中勾选User MicroLIB库
****************************************************/
int fputc(int ch,FILE *f)
{
uint8_t data = ch;
HAL_UART_Transmit(&huart1,&data,1,1);
return(ch);
}
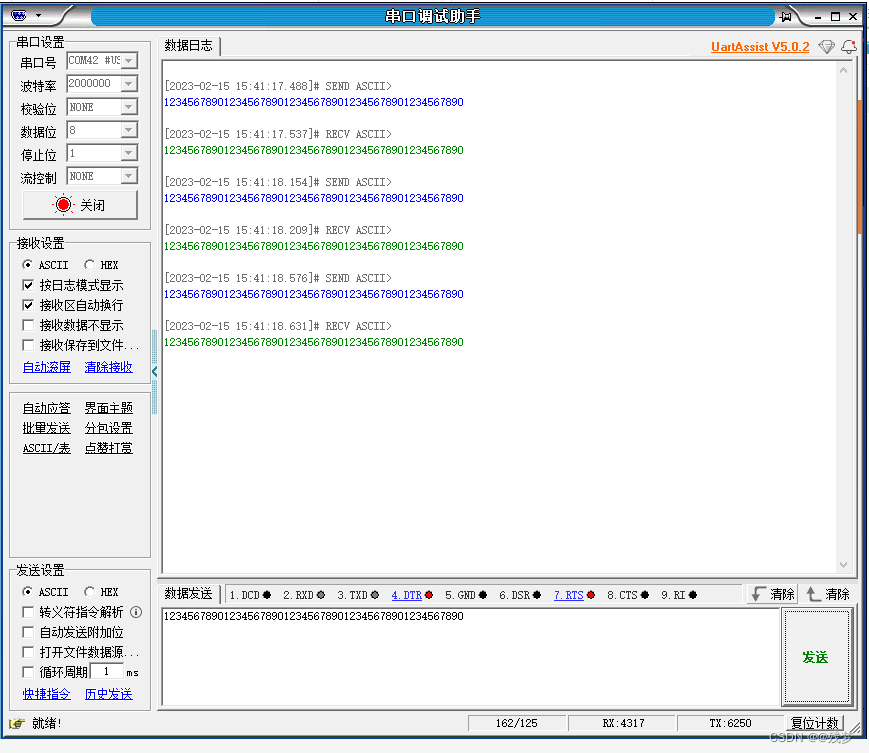
主函数调用MX_USART1_UART_Init();即可实现自收自发

2、电路推荐:CH340N



3、初始化处理框架 MX_USART1_UART_Init()
void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = UART1_BAUDRATE;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if(HAL_UART_Init(&huart1) != HAL_OK){Error_Handler();}
#ifdef _UART1_RX_MODE
HAL_UART_Receive_IT(&huart1, huart1_RxData, sizeof(huart1_RxData));
#else
HAL_UART_Receive_DMA(&huart1,huart1_RxData,sizeof(huart1_RxData));
#endif
}
OverSampling :过采样
8倍过采样速度更快,最高速度可达fPCLK/8,fPCLK为USART时钟;
16倍过采样速度虽然没有8倍过采样那么快,但得到的数据更加精准,其最大速度为fPCLK/16;
那么HAL_UART_Init()里面做了什么呢?
移除参数检查,提取主要后
HAL_StatusTypeDef HAL_UART_Init(UART_HandleTypeDef *huart)
{
if (huart->gState == HAL_UART_STATE_RESET)
{
/* Allocate lock resource and initialize it */
huart->Lock = HAL_UNLOCKED;
/* Init the low level hardware : GPIO, CLOCK */
HAL_UART_MspInit(huart);
}
huart->gState = HAL_UART_STATE_BUSY;
/* Disable the peripheral */
__HAL_UART_DISABLE(huart);
/* Set the UART Communication parameters */
UART_SetConfig(huart);
/* In asynchronous mode, the following bits must be kept cleared:
- LINEN and CLKEN bits in the USART_CR2 register,
- SCEN, HDSEL and IREN bits in the USART_CR3 register.*/
CLEAR_BIT(huart->Instance->CR2, (USART_CR2_LINEN | USART_CR2_CLKEN));
CLEAR_BIT(huart->Instance->CR3, (USART_CR3_SCEN | USART_CR3_HDSEL | USART_CR3_IREN));
/* Enable the peripheral */
__HAL_UART_ENABLE(huart);
/* Initialize the UART state */
huart->ErrorCode = HAL_UART_ERROR_NONE;
huart->gState = HAL_UART_STATE_READY;
huart->RxState = HAL_UART_STATE_READY;
return HAL_OK;
}
所以这个函数顺序则先通过函数HAL_UART_MspInit()初始化底层硬件:GPIO, CLOCK
再调用UART_SetConfig()设置时串口通信参数
__HAL_UART_ENABLE()启用外围设备
那么HAL_UART_MspInit()里面做了什么呢?
该函数主要是初始化底层硬件:GPIO、CLOCK、DMA、中断
开启DMA时需要关联句柄
__HAL_LINKDMA(&huart1,hdmarx,hdma_usart1_rx);//关联DMA句柄
为什么使用的是DMA2_Stream2 且通道4呢

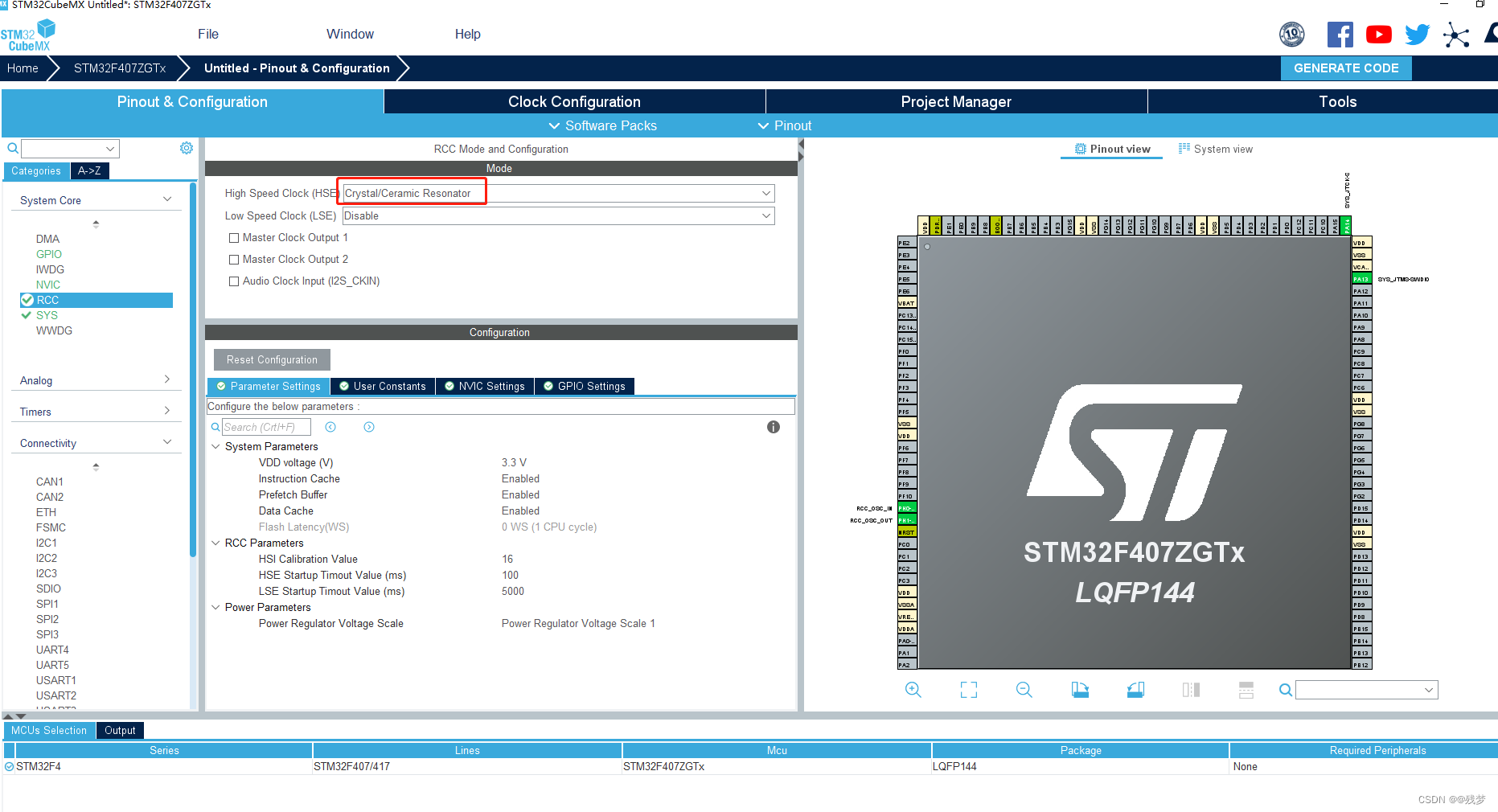
可以看到USART1挂载在APB2上


由此知晓DMA使用的流和通道
启动中断|DMA去接收数据
中断接收函数:HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef huart, uint8_t pData, uint16_t Size)
1、使用此函数值得注意的是此函数Size参数代表接收的数据个数,在接收完该个数后会自动关闭中断,导致后续数据不去接收了**
所以在接收到数据回调函数中需要再次调用此函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
HAL_UART_Transmit(&huart1,huart1_RxData,sizeof(huart1_RxData),10);//自收自发
#ifdef _UART1_RX_MODE
HAL_UART_Receive_IT(&huart1, huart1_RxData, sizeof(huart1_RxData));//中断方式接收则需开启,否则会导致接收完指定数据个数后自动关闭
#endif
}
2、使用前需开启串口中断
HAL_NVIC_SetPriority(USART1_IRQn,1,0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
**DMA中断接收函数:HAL_StatusTypeDef HAL_UART_Receive_DMA(UART_HandleTypeDef huart, uint8_t pData, uint16_t Size)
1、使用前需要开启DMA中断并关联DMA句柄
__HAL_LINKDMA(&huart1,hdmarx,hdma_usart1_rx);//关联DMA句柄
HAL_NVIC_SetPriority(DMA2_Stream2_IRQn,0,0);
HAL_NVIC_EnableIRQ(DMA2_Stream2_IRQn);
中断函数调用HAL库处理函数中的处理
在stm32f4xx_it.c文件中添加中断处理函数:HAL_外设名_IRQHandler();
如HAL_UART_IRQHandler()或者HAL_DMA_IRQHandler();
注意:在HAL_UART_IRQHandler()函数中会调用函数:
函数中会在接收完指定数据个数后会执行的关闭中断(在使用函数HAL_UART_Receive_IT()时)
static HAL_StatusTypeDef UART_Receive_IT(UART_HandleTypeDef *huart)
{
......省略
if (--huart->RxXferCount == 0U)//此处就是在接收完指定数据个数后会执行的关闭中断
{
/* Disable the UART Data Register not empty Interrupt */
__HAL_UART_DISABLE_IT(huart, UART_IT_RXNE);
/* Disable the UART Parity Error Interrupt */
__HAL_UART_DISABLE_IT(huart, UART_IT_PE);
/* Disable the UART Error Interrupt: (Frame error, noise error, overrun error) */
__HAL_UART_DISABLE_IT(huart, UART_IT_ERR);
/* Rx process is completed, restore huart->RxState to Ready */
huart->RxState = HAL_UART_STATE_READY;
/* Check current reception Mode :
If Reception till IDLE event has been selected : */
if (huart->ReceptionType == HAL_UART_RECEPTION_TOIDLE)
{
......
}
else
{
/*Call legacy weak Rx complete callback*/
HAL_UART_RxCpltCallback(huart);
}
}
......省略
}
HAL_DMA_IRQHandler()函数可是不会去关闭的哈
4、CubeMx UART 中断接收回显数据


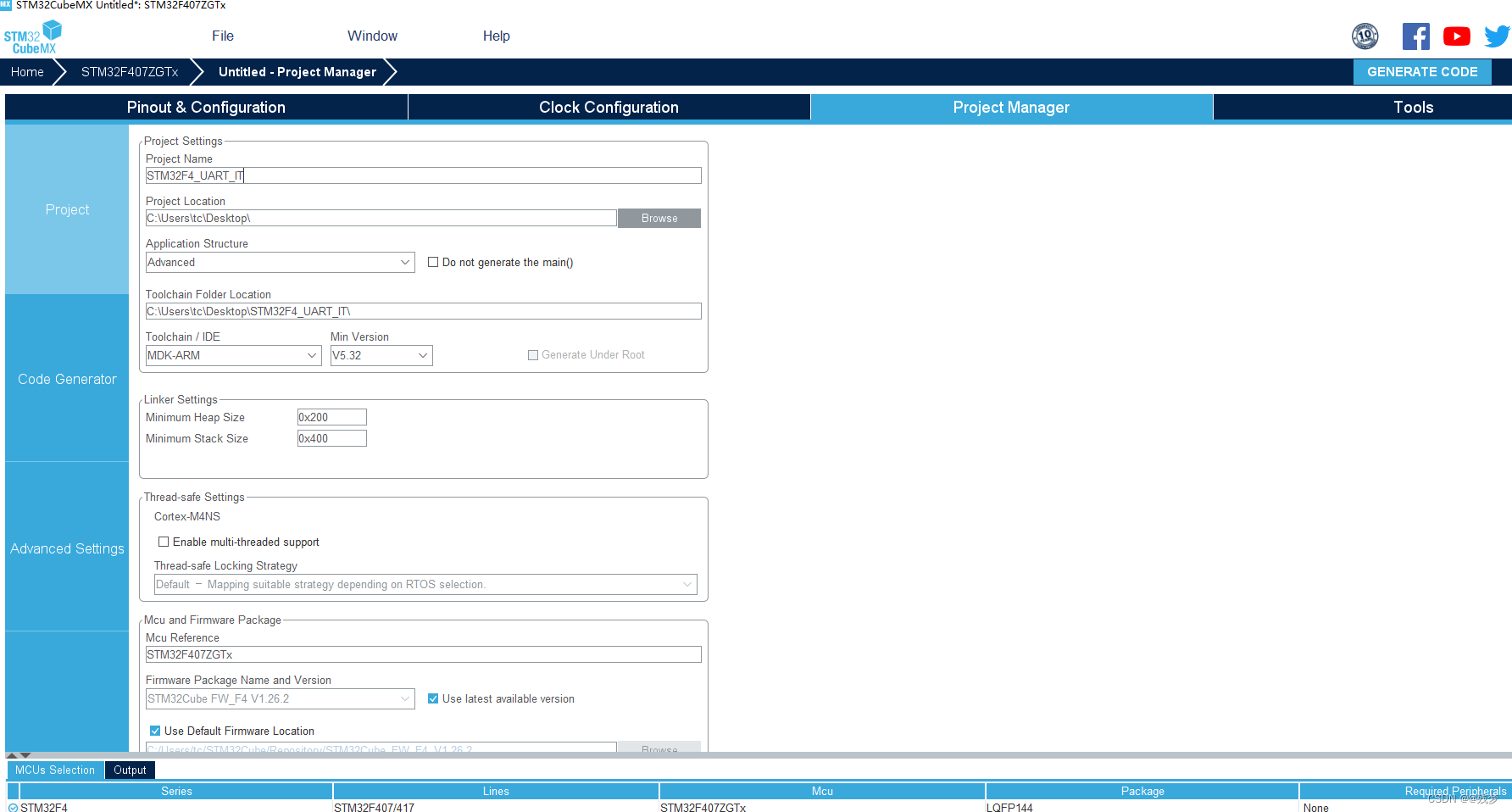
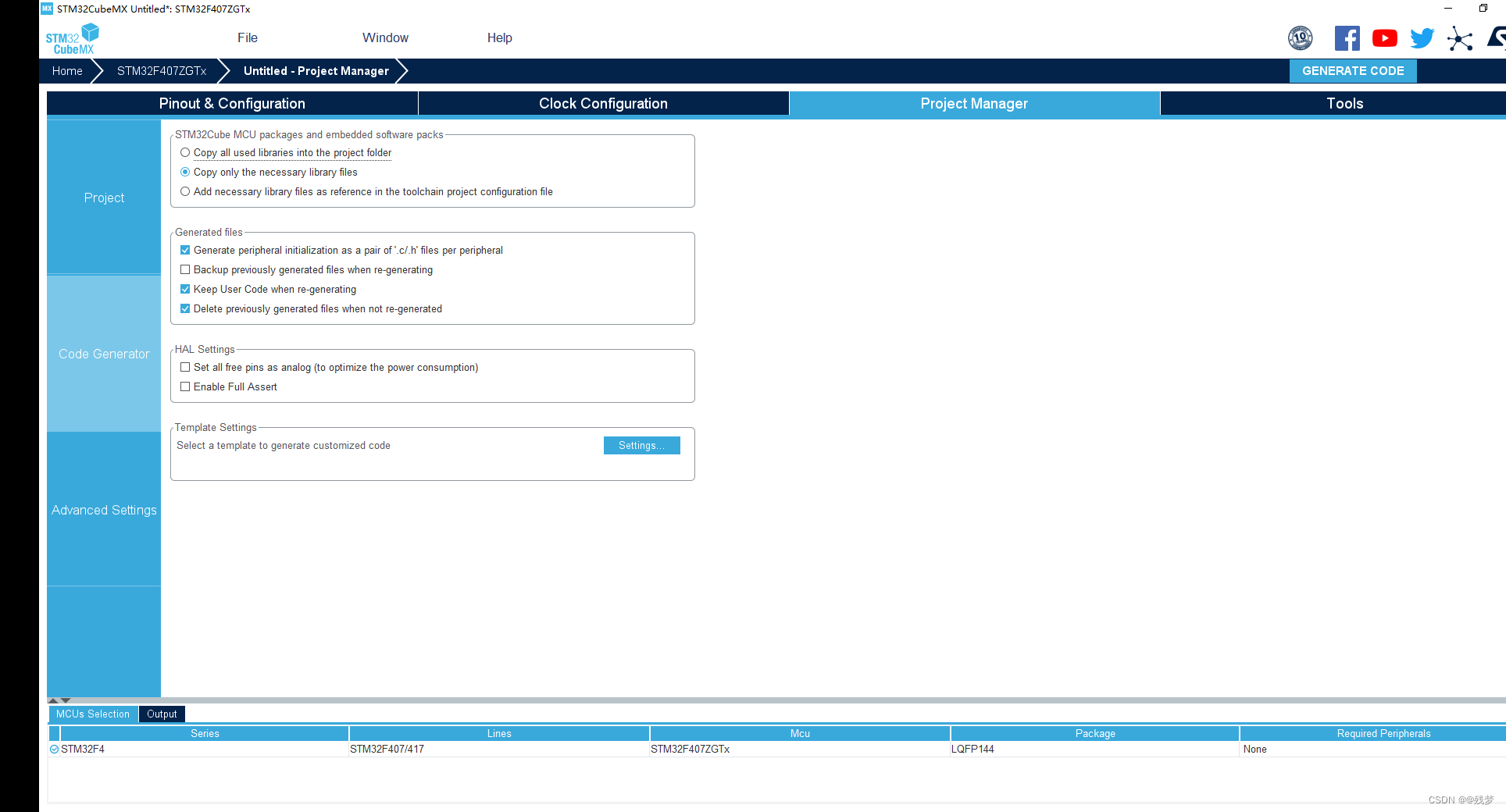


生成代码即可
1、main.h中包含stdio.h文件
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
2、usart.c中
定义接收数据区变量
/* USER CODE BEGIN 0 */
uint8_t huart1_RxData[50] = {0};
/* USER CODE END 0 */
MX_USART1_UART_Init()函数中添加数据中断接收函数:
/* USER CODE BEGIN USART1_Init 2 */
HAL_UART_Receive_IT(&huart1, huart1_RxData, sizeof(huart1_RxData));
/* USER CODE END USART1_Init 2 */
添加回调函数并发送接收到的数据
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
HAL_UART_Transmit(&huart1,huart1_RxData,sizeof(huart1_RxData),10);//自收自发
HAL_UART_Receive_IT(&huart1, huart1_RxData, sizeof(huart1_RxData));//中断方式接收则需开启,否则会导致接收完指定数据个数后自动关闭
}
编写串口重定义函数,方便使用printf()
/****************************************************
@function:串口重定义
@param:void
@return:void
@date:2023.2.14
@note:使用printf时需要此函数,并在Keil魔术棒中勾选User MicroLIB库
****************************************************/
int fputc(int ch,FILE *f)
{
uint8_t data = ch;
HAL_UART_Transmit(&huart1,&data,1,1);
return(ch);
}

usart.c
/**
******************************************************************************
* @file usart.c
* @brief This file provides code for the configuration
* of the USART instances.
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2023 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "usart.h"
/* USER CODE BEGIN 0 */
uint8_t huart1_RxData[50] = {0};
/* USER CODE END 0 */
UART_HandleTypeDef huart1;
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 2000000;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
HAL_UART_Receive_IT(&huart1, huart1_RxData, sizeof(huart1_RxData));
/* USER CODE END USART1_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
/* USART1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/****************************************************
@function:串口重定义
@param:void
@return:void
@date:2023.2.14
@note:使用printf时需要此函数,并在Keil魔术棒中勾选User MicroLIB库
****************************************************/
int fputc(int ch,FILE *f)
{
uint8_t data = ch;
HAL_UART_Transmit(&huart1,&data,1,1);
return(ch);
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
HAL_UART_Transmit(&huart1,huart1_RxData,sizeof(huart1_RxData),10);//自收自发
HAL_UART_Receive_IT(&huart1, huart1_RxData, sizeof(huart1_RxData));//中断方式接收则需开启,否则会导致接收完指定数据个数后自动关闭
}
/* USER CODE END 1 */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
UART 中断接收完整工程:
链接:https://pan.baidu.com/s/1p34JFrjOUl2_IsnvZBSn0w
提取码:au2o
## 5、CubeMx UART DMA中断接收回显数据
注意:除了USART1外其他配置和CubeMx UART 中断接收回显数据一样



产生工程代码
1、usart.c中
定义接收数据区变量
/* USER CODE BEGIN 0 */
uint8_t huart1_RxData[50] = {0};
/* USER CODE END 0 */
MX_USART1_UART_Init()函数中添加数据DMA中断接收函数:
/* USER CODE BEGIN USART1_Init 2 */
HAL_UART_Receive_DMA(&huart1,huart1_RxData,sizeof(huart1_RxData));
/* USER CODE END USART1_Init 2 */
添加回调函数并发送接收到的数据
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
HAL_UART_Transmit(&huart1,huart1_RxData,sizeof(huart1_RxData),10);//自收自发
}
usart.c
/**
******************************************************************************
* @file usart.c
* @brief This file provides code for the configuration
* of the USART instances.
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2023 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "usart.h"
/* USER CODE BEGIN 0 */
uint8_t huart1_RxData[50] = {0};
/* USER CODE END 0 */
UART_HandleTypeDef huart1;
DMA_HandleTypeDef hdma_usart1_rx;
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 2000000;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
HAL_UART_Receive_DMA(&huart1,huart1_RxData,sizeof(huart1_RxData));
/* USER CODE END USART1_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART1 DMA Init */
/* USART1_RX Init */
hdma_usart1_rx.Instance = DMA2_Stream2;
hdma_usart1_rx.Init.Channel = DMA_CHANNEL_4;
hdma_usart1_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_usart1_rx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_usart1_rx.Init.MemInc = DMA_MINC_ENABLE;
hdma_usart1_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_usart1_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_usart1_rx.Init.Mode = DMA_CIRCULAR;
hdma_usart1_rx.Init.Priority = DMA_PRIORITY_LOW;
hdma_usart1_rx.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_usart1_rx) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(uartHandle,hdmarx,hdma_usart1_rx);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
/* USART1 DMA DeInit */
HAL_DMA_DeInit(uartHandle->hdmarx);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
HAL_UART_Transmit(&huart1,huart1_RxData,sizeof(huart1_RxData),10);//自收自发
}
/* USER CODE END 1 */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
UART DMA接收完整工程:
链接:https://pan.baidu.com/s/15aVMAqIVg8DrLjlPVGY5ag
提取码:3nmu