因为ros2的gazebo_ros_pkgs中,已经将该插件移除,或者说将该插件的功能合并到libgazebo_ros_camera.so中,
这里是作者的说明。
 合并后,深度相机的用法参考这里。
合并后,深度相机的用法参考这里。
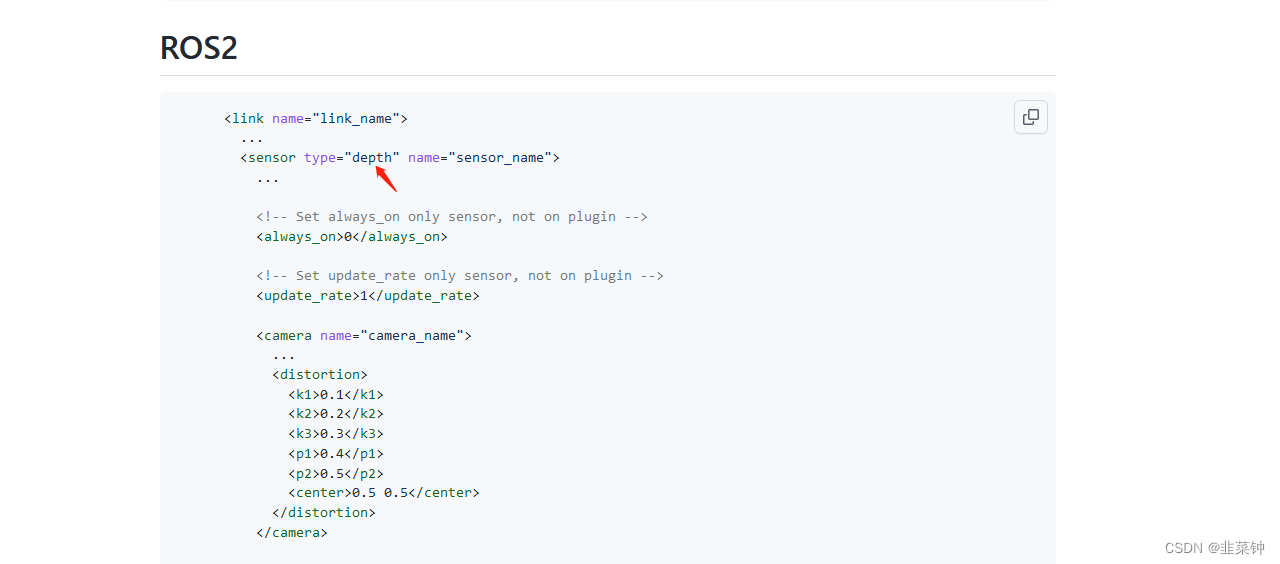 主要是将type改成depth。还有其他类型的相机,可以参考具体的说明。
主要是将type改成depth。还有其他类型的相机,可以参考具体的说明。
因为ros2的gazebo_ros_pkgs中,已经将该插件移除,或者说将该插件的功能合并到libgazebo_ros_camera.so中,
这里是作者的说明。
合并后,深度相机的用法参考这里。
主要是将type改成depth。还有其他类型的相机,可以参考具体的说明。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/347117.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!