进程同步、互斥与信号量
0 引言
操作系统的并发进程有些是独立的,有些需要相互协作。独立的进程在系统中执行时不受其他进程的影响,而另一些进程需要与其他进程共享数据,来完成共同的任务,这些进程之间具有协作关系。但我们要保证这种协作的时间顺序性,以便于让进程正常运行。
在单处理机多道程序环境系统中,进程表现出并发的特征,在一段时间内交替的对进程进行切换执行,但由于并发执行的进程之间的相对速度不可预测,即不确定性,取决于其他进程的活动、操作系统的调度策略等。因此我们保证进程同步,让进程的事件存在某种时序关系下运行。
1 进程同步与互斥
1.1 进程之间的协作关系(互斥、同步、通信)
互斥:多个进程不能同时使用同一资源。
同步:指多个进程中发生的事件存在着某种时序关系,它们必须按规定时序执行,以共同完成一项任务。
进程通信:是指多个进程之间要传递一定量的信息。
1.2 临界资源与临界区
临界资源:某段时间内仅允许一个进程使用的资源。
临界区:每个进程中访问临界资源的那段代码。
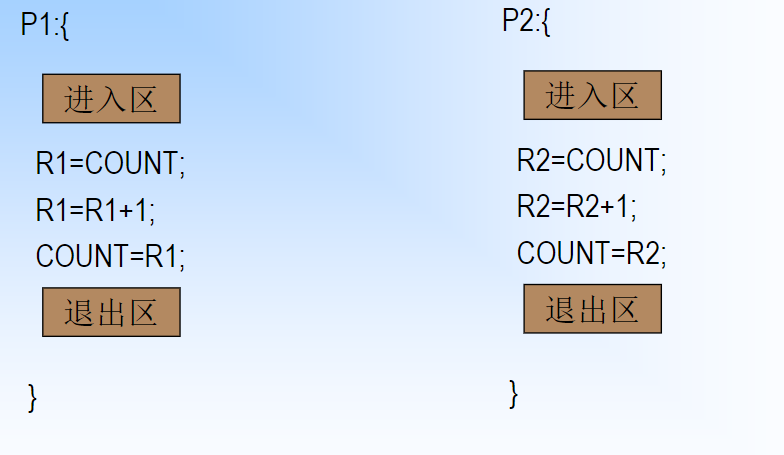
例:P1,P2两进程共享变量COUNT(COUNT的初值为5)
P1:{
R1=COUNT;
R1=R1+1;
COUNT=R1;}
P2:{
R2=COUNT;
R2=R2+1;
COUNT=R2;}
分析:
1》执行顺序P2→P1
执行结果:
P1:COUNT为7,
P2:COUNT为6。
2》两个进程交替
执行顺序:
P1:{R1=COUNT}
P2:{R2=COUNT}
P1:{R1=R1+1;COUNT=R1}
P2:{R2=R2=1;COUNT=R2}
执行结果
P1:COUNT为6,
P2:COUNT为6。
可以看出两种不同执行顺序的执行结果不同。并且COUNT是一个临界资源,P1和P2的两个程序段是临界区。为了保证进程能够互斥对临界资源进行访问,我们需要在P1和P2的前面判断临界资源是否空闲,以此来判断进程能否进入临界区(即执行访问资源的那段代码)来实现进程互斥。
用Bernstein条件考察
R(P1)={R1,COUNT} W(P1)={R1,COUNT}
R(P2)={R2,COUNT} W(P2)={R2,COUNT}
R(P1)∩W(P2)≠{}
P1、P2不符合Bernstein条件,必须对程序的执行顺序施加某种限制。
1.3 临界资源进入准则
(1)空闲让进:临界资源空闲时,允许进程进入临界区。
(2)忙则等待:临界资源被访问时,其他想进入临界区的进程必须等待。
(3)有限等待:需要访问临界资源的进程,因保证在有效时间内进入,避免进入死等状态。
(4)让权等待:当进程不能进入临界区时,应当立即释放处理机,避免让其他进程死等。
2 进程互斥的实现
2.1 硬件方法
为了解决进程互斥进入临界区的问题,采用硬件实现主要有两种:禁止中断和专用机器指令。
禁止中断:通过系统的内核开启、禁止中断来实现。
专用机器指令:
(1)TS(Test and Set)指令
/TS指令:
booleanTS(lock);
booleanlock;
{
booleantemp;
temp=lock;
lock=true;
returntemp;}
//TS指令的使用
while(TS(lock))
/*什么也不做*/;
临界区;
lock = false;
剩余区;
Lock有两种状态:1)当lock=false时,表示资源空闲;2)当lock=true时,表示资源正在被使用。为了实现互斥,设布尔变量lock,其初值为false,表示资源空闲。利用TS指令实现互斥。缺点:没有做到:“让权等待”。
(2)Swap指令
Swap指令是交换两个字节的内容来实现进程互斥。
//Swap指令
void Swap(a,b);
boolean a,b;
{ boolean temp;
temp=a;
a=b;
b=temp;
}
Swap指令的使用
key=true;
do{
Swap(lock,key);
}while(key);
临界区;
lock=false;
剩余区;
利用Swap指令实现进程互斥算法,为每个临界资源设置一个全局布尔变量lock,初始值为false,每个进程设置一个局部变量key,然后进入区利用Swap指令交换lock与key的内容,循环检查key的状态,知道进程进入临界区。
2.2 软件方法
(1)单标志算法
//进程P0
while (turn!=0)
//什么都不做;
临界区;
turn =1;
剩余区;
//进程P1
while (turn!=1)
//什么都不做‘;
临界区;
turn =0;
剩余区;
设置公共整型变量turn,用于指示进入临界区的进程编号i(i=0,1)。当turn=0时,进程P0跳出while循环,进入临界区,在退出区将turn该为1,则进程P1跳出循环,进入临界区,循环往返使P0、P1轮流访问临界资源。缺点:强制性轮流进入临界区,不能保证“空闲让进”。
(2)双标志、先检查算法
//进程P0
while (flag[1])
//什么都不做;
flag[0]=true;
临界区;
flag[0] =false;
剩余区;
//进程P1
while ( flag[0])
//什么都不做;
flag[1]=true;
临界区;
flag[1] =false;
剩余区;
设置数组flag,初始时设每个元素为false,表示所有进程都未进入临界区。若flag[i]=true,表示进程进入临界区执行。在每个进程进入临界区时,先查看临界资源是否被使用,若正在使用,该进程等待,否则才可进入。解决了“空闲让进”问题。缺点:可能同时进入临界区,不能保证“忙则等待”(如果先执行while (flag[1]),跳过进程P0的循环,然后再执行while ( flag[0]) ,跳过进程P1的循环,使两个进程同时进入临界区),主要问题先检查后修改导致的。
(3)双标志、先修改后检查算法
//进程P0
flag[0]=true;
while (flag[1])
//什么也不做;
临界区;
flag[0] =false;
剩余区;
//进程P1
flag[1]=true;
while (flag[0])
//什么也不做;
临界区;
flag[1] =false ;
剩余区;
两进程先后同时作flag[i]=true;
缺点:保证了不同时进入临界区,但又可能都进不去。不能保证“有空让进”。(如果先执行flag[0]=true;,使得P1进入循环状态,然后再执行flag[1]=true;,使得P0进入循环状态,最终两个进程都进不去临界区)
(4)先修改、后检查、后修改算法
//进程P0
flag[0]=true;
turn=1;
while (flag[1]) && (turn==1)
//什么也不做;
临界区;
flag[0] =false ;
剩余区;
//进程P1
flag[1]=true;
turn=0;
while (flag[0]) && (turn==0)
//什么也不做;
临界区;
flag[1] =false ;
剩余区;
保证了“有空让进”和“忙则等待”。
3 信号量和PV操作
3.1 信号量的定义
1965年,荷兰学者Dijkstra提出了信号灯机制,卓有成效地解决了进程同步问题。
记录型信号灯的定义:
(1)定义记录型信号量数据结构。
struct semaphore{
int value; //定义资源数的标识
struct PCB*queue; //等待队列
}
(2)wait 原语:请求一个资源(P 操作)
void wait(semaphore s){
s.value = s.value -1; 占用一个资源
if(s.value < 0)
block(s.queue);
/* 将进程阻塞,并将其投入等待队列s.queue */
}
(3)signal 原语:释放一个资源(V 操作)
void signal(semaphore s){
s.value = s.value + 1;//释放一个资源
if(s.value <= 0)
wackup(s.queue);
/* 唤醒阻塞进程,将其从等待队列s.queue 取出,投入就绪队列*/
}
//s.value的初值表示系统中某种资源数目。
//wait(s)表示要申请一个资源。
//signal(s)表示要释放一个资源。
//s.value <0时,|s.value|表示等待队列的进程数。
3.2 用信号灯(信号量)解决互斥问题
semaphoremutex=1;
P1:
while (1){
P(mutex);
临界区;
V(mutex);
剩余区;
};
P2:
while (1){
P(mutex);
临界区;
V(mutex);
剩余区;
};
3.3 用信号灯解决同步问题
semaphore a,b=0,0;
{s1;V(a); V(b)}
{P(a);s2
{P(b);s3}
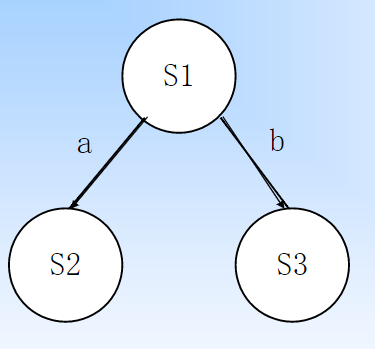
因此,信号灯可以解决互斥问题和同步问题。