1dB压缩点与三阶交调点
要知道放大器是一个非线性系统,传输函数基本用泰勒级数表示

如果输入信号幅度很小,那么上式中2次及以上的项就可以忽略而成为小信号的情况。在许多情况下我们可以忽略3次以上的项。
如果输入一个正弦信号
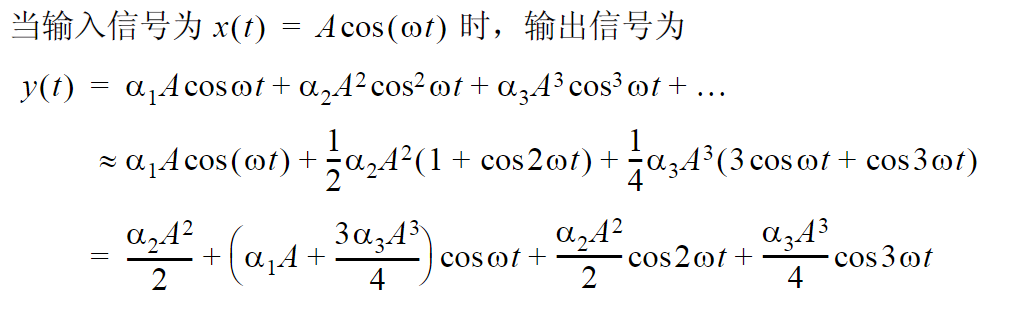
1、可以看到一个单频率信号输入到非线性系统里面就会产生谐波。
2、除了有直流,线性基频,还有一些基频多次方的项,不同谐波频率的项。
如果a1和a3的符号相反,则信号增益将随幅度A的增大而减小。(这种假设并不在所有情况下成立,例如一个共发射极的三极管放大器,其集电极电流与基极电压之间的指数关系使a1和a3的符号相同。这时我们仍然可以观察到增益压缩的情况,这主要是由于晶体管受电源电压的限制工作在非放大区引起的。对于差分电路,包括Bipolar和CMOS,a1和 a3确实具有不同的符号。)
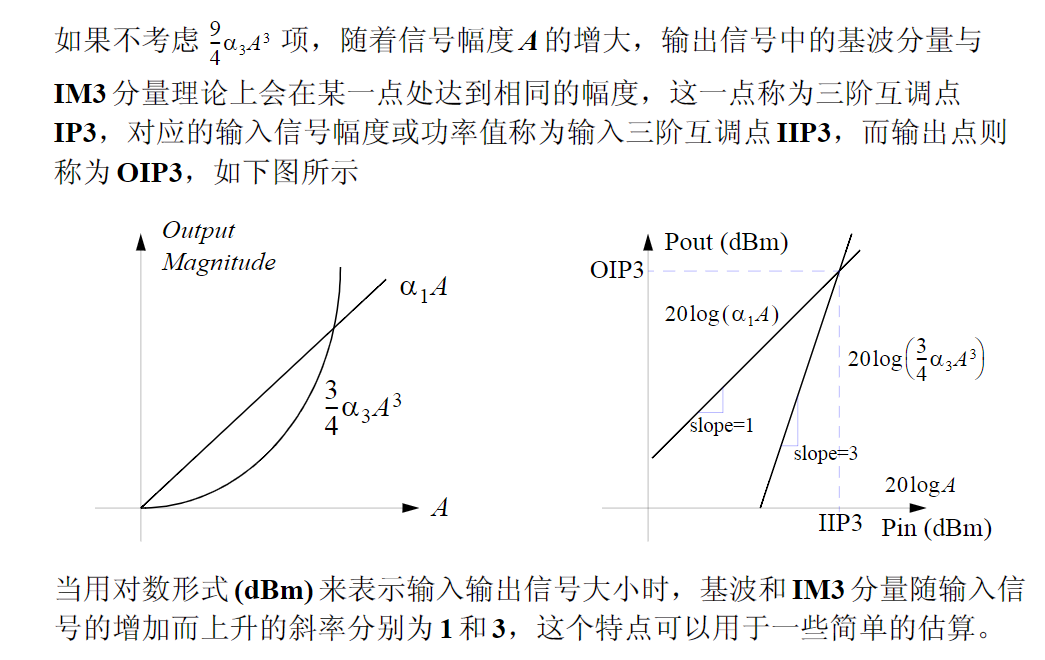
如果用对数(功率)来表示放大器的输入和输出信号幅度,可以清楚地看到输出功率随输
入功率增大而偏离线性关系的情况。
当输出功率与理想的线性情况偏离达到1dB时,放大器的增益也下降了1dB,此时的输入信号功率(或幅度)值称为1-dB增益压缩点(1-dB Gain Compression Point)
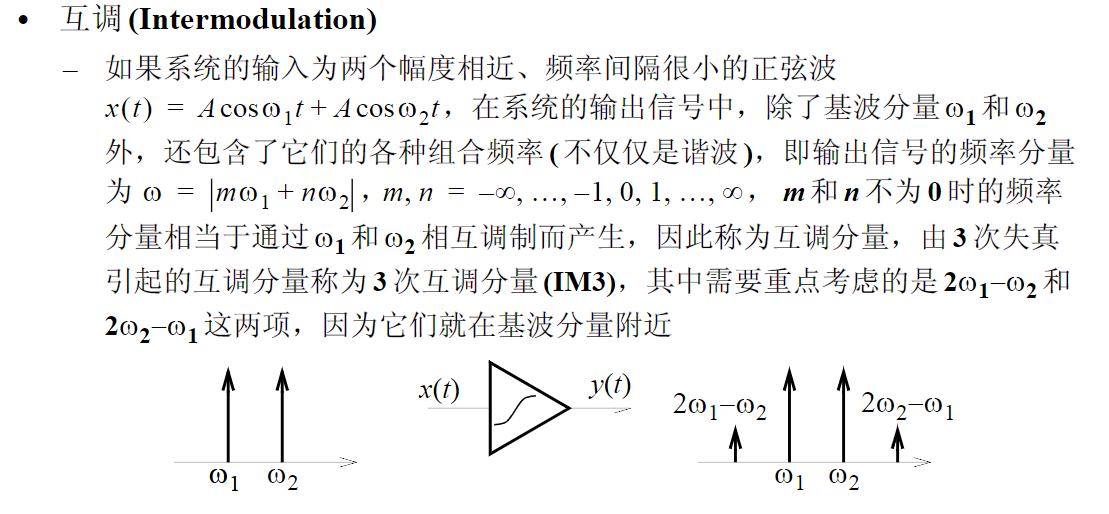
如果输入两个正弦信号
相当于信号加一个干扰。会产生谐波和互调分量。


三阶交调点和1dB压缩点的关系,可以知道,三阶交调点相对于1dB压缩点是固定的,1dB压缩点相同,三阶交调点也相同。而1dB压缩点,是由器件本身非线性系数决定,也就是器件本身属性。
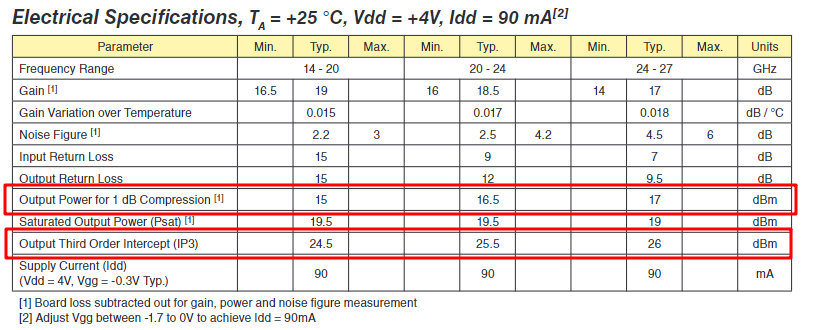
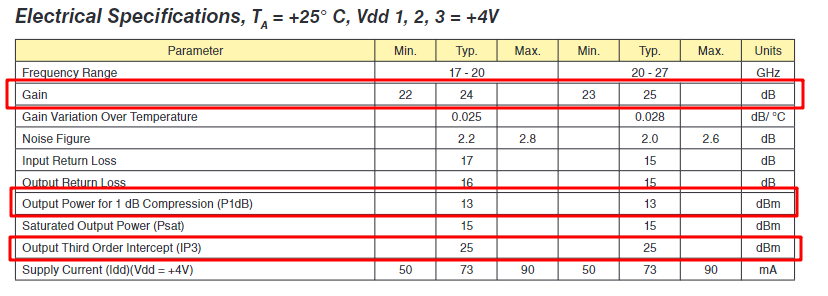
从实际数据手册看看是不是对的

HMC504和HMC751,输出三阶交调点接近,分别25.5和25。1dB压缩点应该小10dB左右,15dBm左右。
1dB压缩点
这个指标用在放大器上,低噪放和功放都有,通常是OP1dB,输出1dB压缩点。
一个放大器,增益一定,输入多少放大多少倍。但是我一直提高输入,输入多大都可以吗。它都能放大相同的倍数?
1dB压缩点就是用来衡量,它最多能放大多大的信号,输入最大多少。
如下面这个图。一个正常的放大器,输入与输出的关系,是下面的曲线。都是用对数表示,dBm。
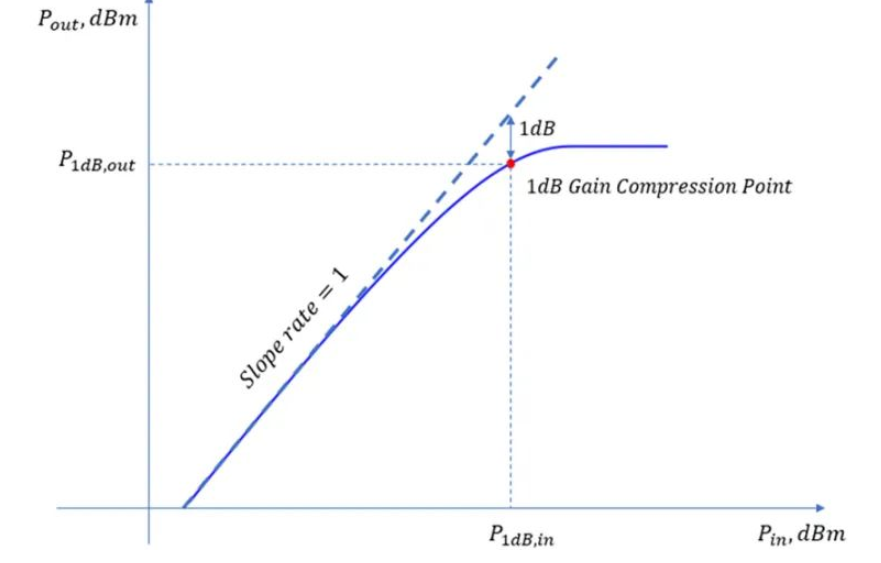
y=ax,a=y/x,y是输出功率,x是输入功率,a就是增益,也是斜率。
对数形式:Pout(dBm)=Pin (dBm)+G(dB)
可以看到,随着输入功率的增大,输出功率增大得速度变慢,越来越偏离理想的曲线,增益逐步变低,这就是增益压缩效应。
斜率变小,说明增益较小,输出实际减小了,能量肯定跑到其它地方去了。也就是出现非线性效应,信号频率的功率在减小,出现谐波,也就是噪声,它们的功率在快速增大。从而对邻带或带内造成干扰。
实际增益比线性增益跌落1dB的位置,称之为1dB增益压缩点,该点对应的输入、输出功率一般分别标记为P1dB,in 和P1dB,out,OP1dB 。
所以放大器应该工作在1dB压缩点以内。放大区工作在线性区,不会参数谐波分量。
测试:
https://www.cnblogs.com/txqtxg/p/15976492.html
三阶交调点,IP3
三阶交调点,三阶截取点(IP3),一般用输出三阶交调点(OIP3):主要是表达放大器失真性能的参数。
三阶交调是什么意思呢?
放大器的输入存在两个相近频率的信号。有下面两种情况
1、或者存在相近频率的干扰
2、放大器工作在非线性区,也就是1dB以上或者附近。也会产生谐波。
两个相近频率的信号又会相互影响产生不同频率的信号。如下图所示
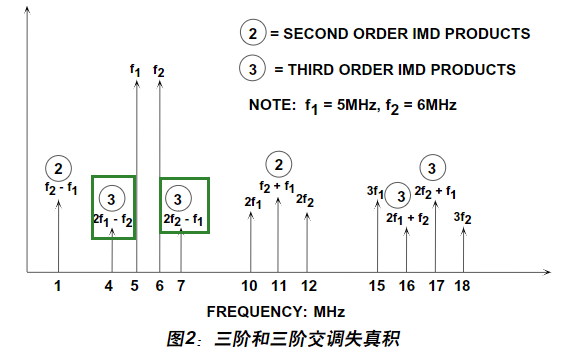
为什么要用三阶交调点呢?
图中即为三阶交调,之所以单独考虑三阶交调,是因为三阶交调距离真实信号非常近,难以通过滤波的方式去除,因此对信号的影响最大。而且三阶交调分量的功率电平最大。

IP3越高表示线性度越好和更少的失真。
三阶截点越高,表征系统线性度越好。

怎么测量得到三阶交调点?
输入两个基频双音信号,即使放大器工作在线性放大区,也会产生三阶交调现象,只要做出输入和输出关系曲线,找到三阶信号和基频信号的1dB压缩点即可,再延长斜率曲线,交点即三阶交调点。
三阶交调信号的增益时基频信号的增益不一样,它们必相交。如下图
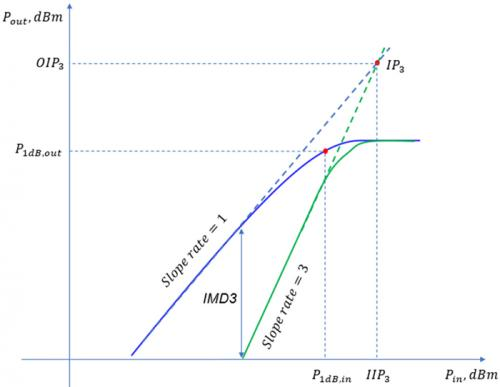

当输入信号足够小放大器工作在线性区,交调失真不会恶化,保持在一个比较均衡的水平;随着输入到DUT的功率的增大,放大器逐渐进入压缩区,交调失真将发生快速恶化。
OIPdBm = GdBm + IIPdBm
参考
https://rf.eefocus.com/article/id-335037
相位差与延迟
同轴电缆中电压信号相位差与延迟的关系
相位差,顾名思义,就是两个波之间相位差的值。

为简化概念,特指正弦波,假设有两个电压信号
u 1 ( t ) = A 1 sin ( θ 1 ( t ) ) = A 1 sin ( ω 1 t + φ 1 ) u 2 ( t ) = A 2 sin ( θ 2 ( t ) ) = A 2 sin ( ω 2 t + φ 2 ) \begin{array}{l} \mathrm{u}_{1}(\mathrm{t})=\mathrm{A}_{1} \sin \left(\theta_{1}(\mathrm{t})\right)=\mathrm{A}_{1} \sin \left(\omega_{1} \mathrm{t}+\varphi_{1}\right) \\ \mathrm{u}_{2}(\mathrm{t})=\mathrm{A}_{2} \sin \left(\theta_{2}(\mathrm{t})\right)=\mathrm{A}_{2} \sin \left(\omega_{2} \mathrm{t}+\varphi_{2}\right) \end{array} u1(t)=A1sin(θ1(t))=A1sin(ω1t+φ1)u2(t)=A2sin(θ2(t))=A2sin(ω2t+φ2)$
如果u1和u2的频率相同,则两者的相位差为初始相位之差。
两条曲线频率相同,最大值相同。因为相位不同,导致初始值不同。也就造成某个点时间的幅值不同。
$ \Delta $ $ \varphi $ = $ \varphi _ {1} $ - $ \varphi _ {2} $
$ \frac {\Delta \varphi }{2\pi } $ = $ \frac {\Delta t}{T} $
$ \Delta $ $ \varphi $ = $ \triangle $ t $ \frac {2\pi }{T} $ =2 $ \pi $ f $ \triangle $ t
由上式看到,在恒定延时情况下,相位差Δφ正比于信号频率f。
参考:
https://www.cnblogs.com/qiantuo1234/p/7460506.html


![[个人笔记] Zabbix实现自定义脚本监控Agent端](https://img-blog.csdnimg.cn/ba9a32e68079454889251c63a0169816.png)