注意力机制
- 1 SENet
- 2 ECANet
- 3 CBAM
- 3.1 通道注意力
- 3.2 空间注意力
- 3.3 CBAM
- 4 展示网络层具体信息
1 SENet
SE注意力机制(Squeeze-and-Excitation Networks):是一种通道类型的注意力机制,就是在通道维度上增加注意力机制,主要内容是是squeeze和excitation.
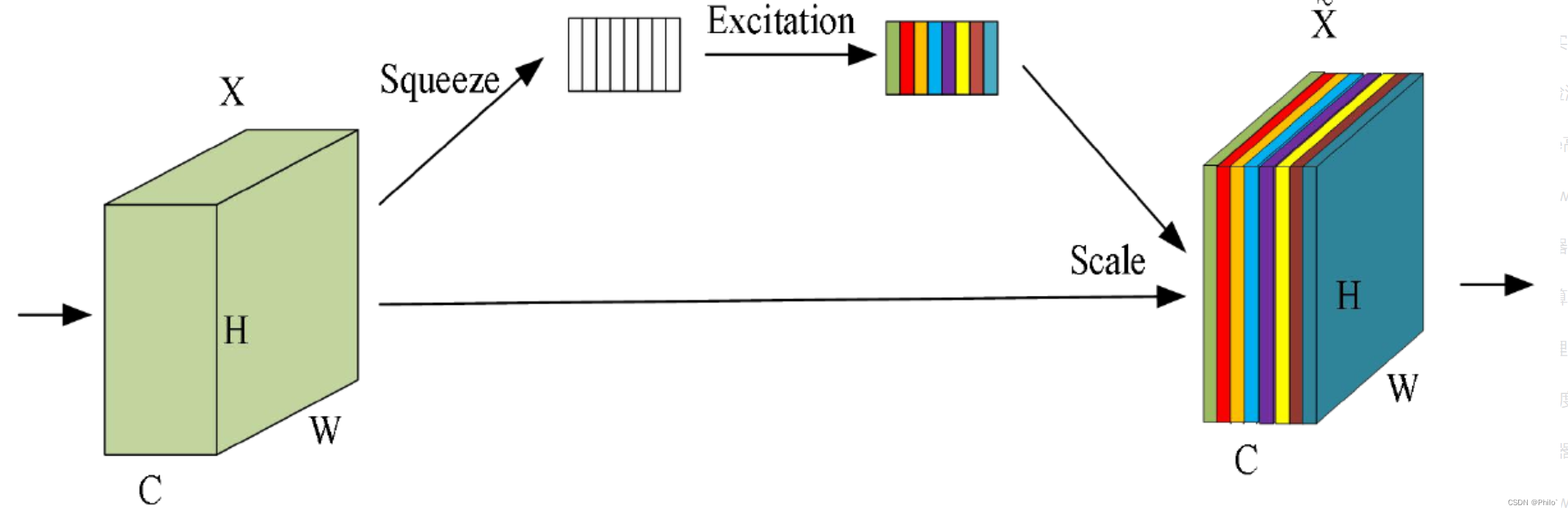
就是使用另外一个新的神经网络(两个Linear层),针对通道维度的数据进行学习,获取到特征图每个通道的重要程度,然后再和原始通道数据相乘即可。
具体参考Blog:
CNN中的注意力机制
小结:
-
SENet的核心思想是通过全连接网络根据loss损失来自动学习特征权重,而不是直接根据特征通道的数值分配来判断,使有效的特征通道的权重大。
-
论文认为excitation操作中使用两个全连接层相比直接使用一个全连接层,它的好处在于,具有更多的非线性,可以更好地拟合通道间的复杂关联。
代码:
拆解步骤,forward代码写的比较细节
import torch
from torch import nn
from torchstat import stat # 查看网络参数
# 定义SE注意力机制的类
class se_block(nn.Module):
# 初始化, in_channel代表输入特征图的通道数, ratio代表第一个全连接下降通道的倍数
def __init__(self, in_channel, ratio=4):
# 继承父类初始化方法
super(se_block, self).__init__()
# 属性分配
# 全局平均池化,输出的特征图的宽高=1
self.avg_pool = nn.AdaptiveAvgPool2d(output_size=1)
# 第一个全连接层将特征图的通道数下降4倍
self.fc1 = nn.Linear(in_features=in_channel, out_features=in_channel//ratio, bias=False)
# relu激活
self.relu = nn.ReLU()
# 第二个全连接层恢复通道数
self.fc2 = nn.Linear(in_features=in_channel//ratio, out_features=in_channel, bias=False)
# sigmoid激活函数,将权值归一化到0-1
self.sigmoid = nn.Sigmoid()
# 前向传播
def forward(self, inputs): # inputs 代表输入特征图
# 获取输入特征图的shape
b, c, h, w = inputs.shape
# 全局平均池化 [b,c,h,w]==>[b,c,1,1]
x = self.avg_pool(inputs)
# 维度调整 [b,c,1,1]==>[b,c]
x = x.view([b,c])
# 第一个全连接下降通道 [b,c]==>[b,c//4] # 这里也是使用Linear层的原因,只是对Channel进行线性变换
x = self.fc1(x)
x = self.relu(x)
# 第二个全连接上升通道 [b,c//4]==>[b,c] # 再通过Linear层恢复Channel数目
x = self.fc2(x)
# 对通道权重归一化处理 # 将数值转化为(0,1)之间,体现不同通道之间重要程度
x = self.sigmoid(x)
# 调整维度 [b,c]==>[b,c,1,1]
x = x.view([b,c,1,1])
# 将输入特征图和通道权重相乘
outputs = x * inputs
return outputs
结果展示:
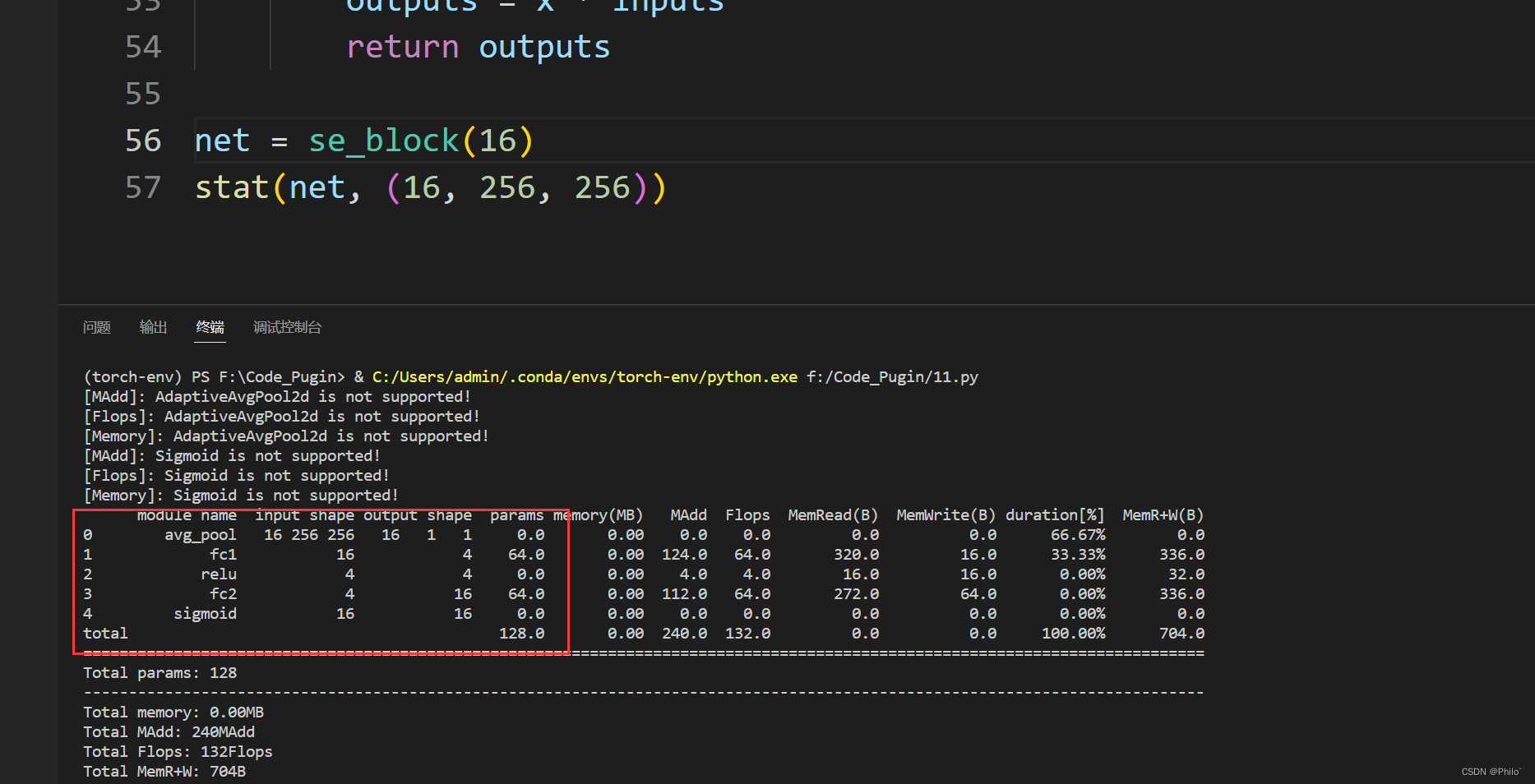
提示: in_channel/ratio需要大于0,否则线性层输入是0维度,没有意义,可以根据自己需求调整ratio的大小。
2 ECANet
作者表明 SENet 中的降维会给通道注意力机制带来副作用,并且捕获所有通道之间的依存关系是效率不高的,而且是不必要的。
参考Blog:
CNN中的注意力机制
代码:
详细版本:在forward中,介绍了每一步的作用
import torch
from torch import nn
import math
from torchstat import stat # 查看网络参数
# 定义ECANet的类
class eca_block(nn.Module):
# 初始化, in_channel代表特征图的输入通道数, b和gama代表公式中的两个系数
def __init__(self, in_channel, b=1, gama=2):
# 继承父类初始化
super(eca_block, self).__init__()
# 根据输入通道数自适应调整卷积核大小
kernel_size = int(abs((math.log(in_channel, 2)+b)/gama))
# 如果卷积核大小是奇数,就使用它
if kernel_size % 2:
kernel_size = kernel_size
# 如果卷积核大小是偶数,就把它变成奇数
else:
kernel_size = kernel_size + 1
# 卷积时,为例保证卷积前后的size不变,需要0填充的数量
padding = kernel_size // 2
# 全局平均池化,输出的特征图的宽高=1
self.avg_pool = nn.AdaptiveAvgPool2d(output_size=1)
# 1D卷积,输入和输出通道数都=1,卷积核大小是自适应的
# 这个1维卷积需要好好了解一下机制,这是改进SENet的重要不同点
self.conv = nn.Conv1d(in_channels=1, out_channels=1, kernel_size=kernel_size,
bias=False, padding=padding)
# sigmoid激活函数,权值归一化
self.sigmoid = nn.Sigmoid()
# 前向传播
def forward(self, inputs):
# 获得输入图像的shape
b, c, h, w = inputs.shape
# 全局平均池化 [b,c,h,w]==>[b,c,1,1]
x = self.avg_pool(inputs)
# 维度调整,变成序列形式 [b,c,1,1]==>[b,1,c]
x = x.view([b,1,c]) # 这是为了给一维卷积
# 1D卷积 [b,1,c]==>[b,1,c]
x = self.conv(x)
# 权值归一化
x = self.sigmoid(x)
# 维度调整 [b,1,c]==>[b,c,1,1]
x = x.view([b,c,1,1])
# 将输入特征图和通道权重相乘[b,c,h,w]*[b,c,1,1]==>[b,c,h,w]
outputs = x * inputs
return outputs
精简版:
import torch
import torch.nn as nn
import torch.nn.functional as F
from torchinfo import summary
import math
class EfficientChannelAttention(nn.Module): # Efficient Channel Attention module
def __init__(self, c, b=1, gamma=2):
super(EfficientChannelAttention, self).__init__()
t = int(abs((math.log(c, 2) + b) / gamma))
k = t if t % 2 else t + 1
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.conv1 = nn.Conv1d(1, 1, kernel_size=k, padding=int(k/2), bias=False)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
x = self.avg_pool(x)
# 这里可以对照上一版代码,理解每一个函数的作用
x = self.conv1(x.squeeze(-1).transpose(-1, -2)).transpose(-1, -2).unsqueeze(-1)
out = self.sigmoid(x)
return out
效果展示:
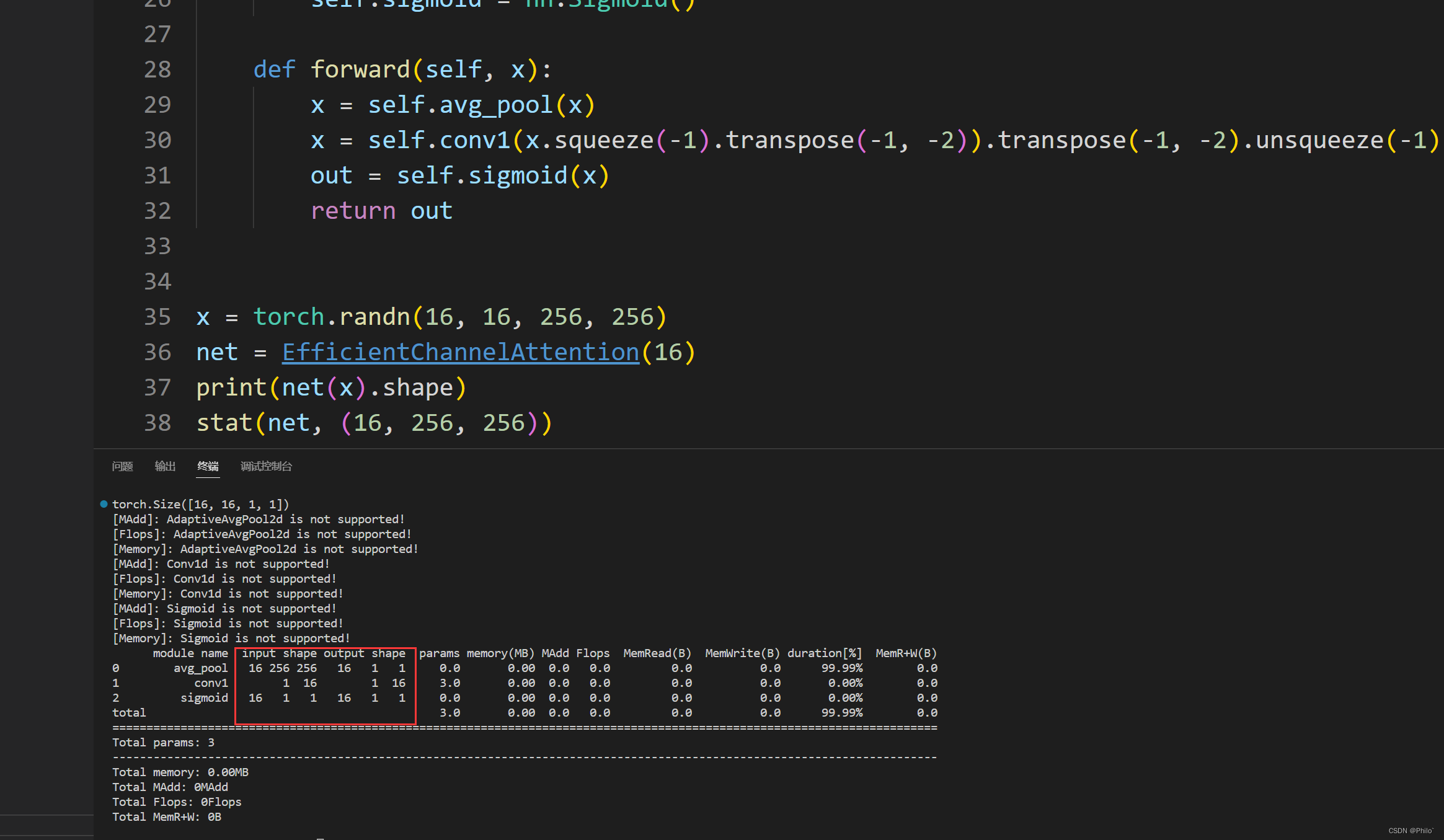
总结:
ECANet参数更少!
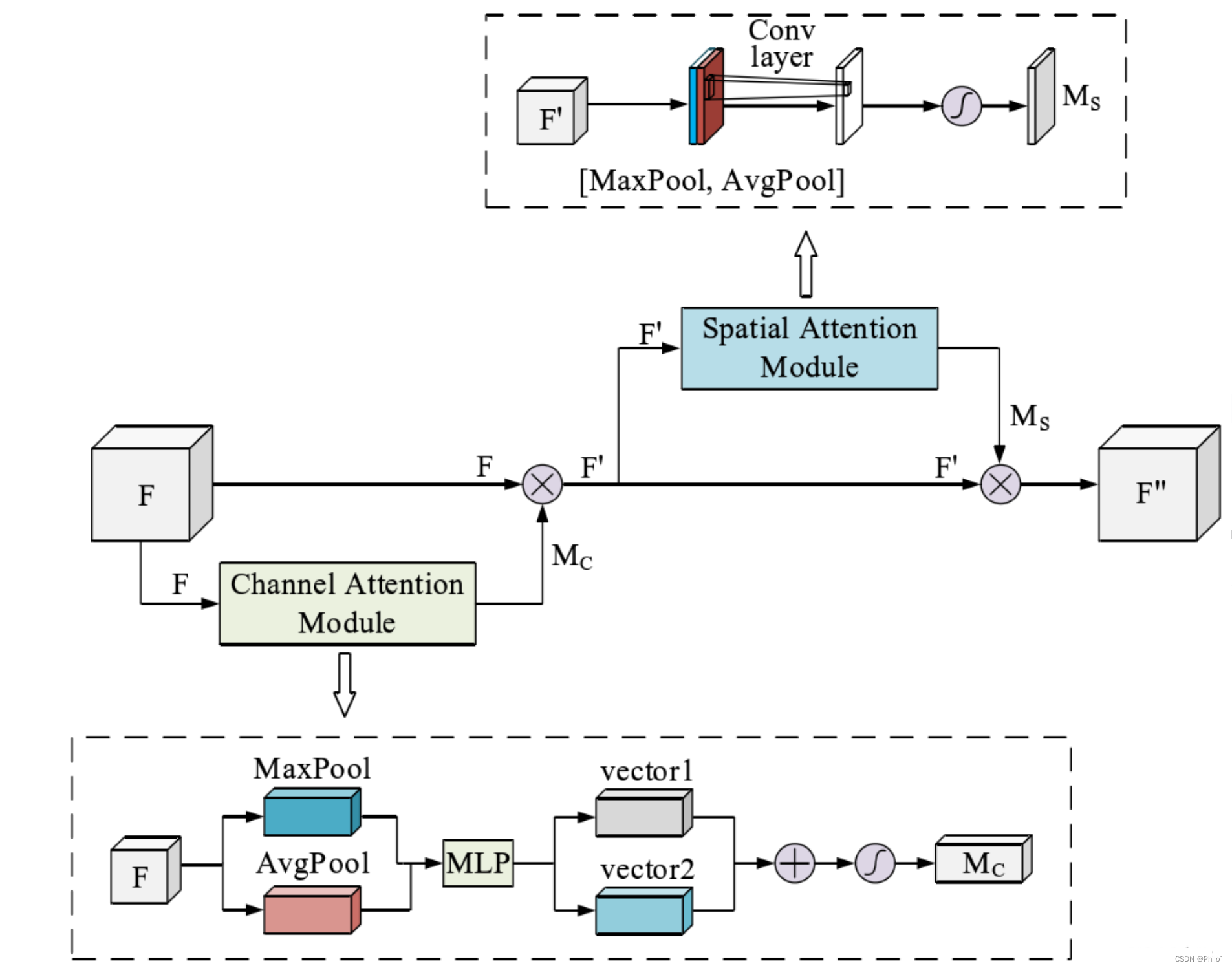
3 CBAM
CBAM注意力机制是由**通道注意力机制(channel)和空间注意力机制(spatial)**组成。
先通道注意力,后空间注意力的顺序注意力模块!
3.1 通道注意力
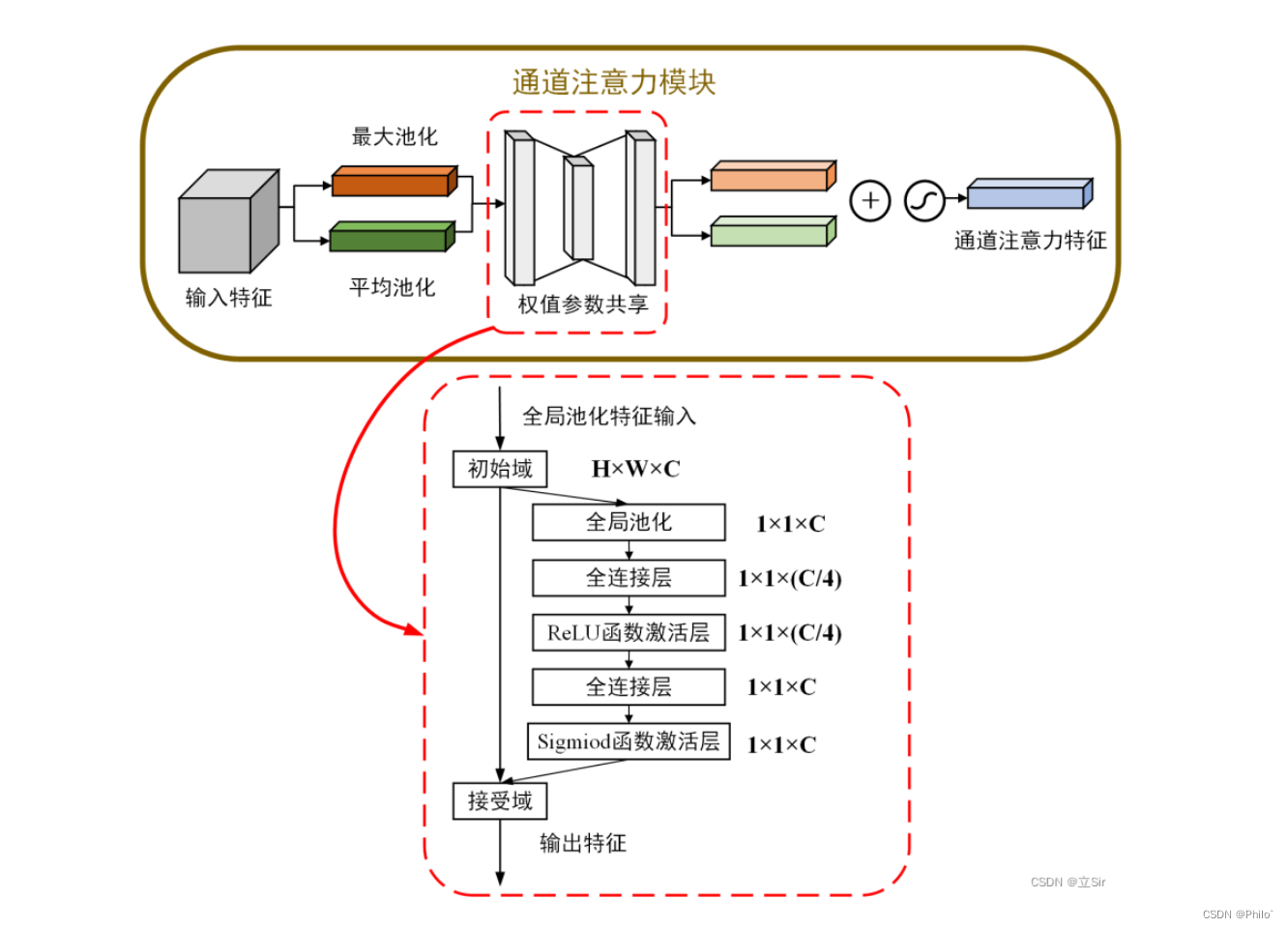
输入数据,对数据分别做最大池化操作和平均池化操作(输出都是batchchannel11),然后使用SENet的方法,针对channel进行先降维后升维操作,之后将输出的两个结果相加,再使用Sigmoid得到通道权重,再之后使用View函数恢复**(batchchannel11)**维度,和原始数据相乘得到通道注意力结果!
通道注意力代码:
#(1)通道注意力机制
class channel_attention(nn.Module):
# 初始化, in_channel代表输入特征图的通道数, ratio代表第一个全连接的通道下降倍数
def __init__(self, in_channel, ratio=4):
# 继承父类初始化方法
super(channel_attention, self).__init__()
# 全局最大池化 [b,c,h,w]==>[b,c,1,1]
self.max_pool = nn.AdaptiveMaxPool2d(output_size=1)
# 全局平均池化 [b,c,h,w]==>[b,c,1,1]
self.avg_pool = nn.AdaptiveAvgPool2d(output_size=1)
# 第一个全连接层, 通道数下降4倍
self.fc1 = nn.Linear(in_features=in_channel, out_features=in_channel//ratio, bias=False)
# 第二个全连接层, 恢复通道数
self.fc2 = nn.Linear(in_features=in_channel//ratio, out_features=in_channel, bias=False)
# relu激活函数
self.relu = nn.ReLU()
# sigmoid激活函数
self.sigmoid = nn.Sigmoid()
# 前向传播
def forward(self, inputs):
# 获取输入特征图的shape
b, c, h, w = inputs.shape
# 输入图像做全局最大池化 [b,c,h,w]==>[b,c,1,1]
max_pool = self.max_pool(inputs)
# 输入图像的全局平均池化 [b,c,h,w]==>[b,c,1,1]
avg_pool = self.avg_pool(inputs)
# 调整池化结果的维度 [b,c,1,1]==>[b,c]
max_pool = max_pool.view([b,c])
avg_pool = avg_pool.view([b,c])
# 第一个全连接层下降通道数 [b,c]==>[b,c//4]
x_maxpool = self.fc1(max_pool)
x_avgpool = self.fc1(avg_pool)
# 激活函数
x_maxpool = self.relu(x_maxpool)
x_avgpool = self.relu(x_avgpool)
# 第二个全连接层恢复通道数 [b,c//4]==>[b,c]
x_maxpool = self.fc2(x_maxpool)
x_avgpool = self.fc2(x_avgpool)
# 将这两种池化结果相加 [b,c]==>[b,c]
x = x_maxpool + x_avgpool
# sigmoid函数权值归一化
x = self.sigmoid(x)
# 调整维度 [b,c]==>[b,c,1,1]
x = x.view([b,c,1,1])
# 输入特征图和通道权重相乘 [b,c,h,w]
outputs = inputs * x
return outputs
3.2 空间注意力
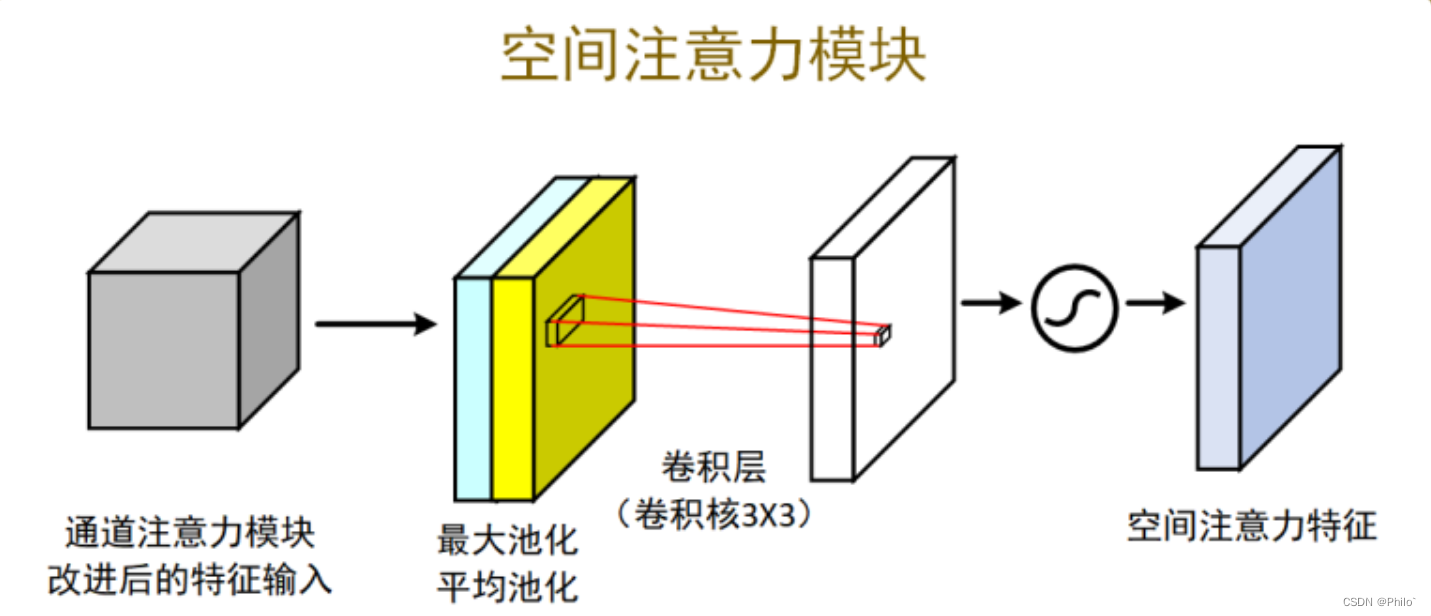
针对输入数据,分别选取数据中最大值所在的维度(batch1h*w),和按照维度进行数据平均操作(batch1hw),然后将两个数据做通道连接(batch2hw),使用卷积操作,将channel维度降为1,之后对结果取sigmoid,得到空间注意力权重,和原始数据相乘得到空间注意力结果。
代码:
#(2)空间注意力机制
class spatial_attention(nn.Module):
# 初始化,卷积核大小为7*7
def __init__(self, kernel_size=7):
# 继承父类初始化方法
super(spatial_attention, self).__init__()
# 为了保持卷积前后的特征图shape相同,卷积时需要padding
padding = kernel_size // 2
# 7*7卷积融合通道信息 [b,2,h,w]==>[b,1,h,w]
self.conv = nn.Conv2d(in_channels=2, out_channels=1, kernel_size=kernel_size,
padding=padding, bias=False)
# sigmoid函数
self.sigmoid = nn.Sigmoid()
# 前向传播
def forward(self, inputs):
# 在通道维度上最大池化 [b,1,h,w] keepdim保留原有深度
# 返回值是在某维度的最大值和对应的索引
x_maxpool, _ = torch.max(inputs, dim=1, keepdim=True)
# 在通道维度上平均池化 [b,1,h,w]
x_avgpool = torch.mean(inputs, dim=1, keepdim=True)
# 池化后的结果在通道维度上堆叠 [b,2,h,w]
x = torch.cat([x_maxpool, x_avgpool], dim=1)
# 卷积融合通道信息 [b,2,h,w]==>[b,1,h,w]
x = self.conv(x)
# 空间权重归一化
x = self.sigmoid(x)
# 输入特征图和空间权重相乘
outputs = inputs * x
return outputs
3.3 CBAM
将通道注意力模块和空间注意力模块顺序串联得到CBAM模块!
代码:
class cbam(nn.Module):
# 初始化,in_channel和ratio=4代表通道注意力机制的输入通道数和第一个全连接下降的通道数
# kernel_size代表空间注意力机制的卷积核大小
def __init__(self, in_channel, ratio=4, kernel_size=7):
# 继承父类初始化方法
super(cbam, self).__init__()
# 实例化通道注意力机制
self.channel_attention = channel_attention(in_channel=in_channel, ratio=ratio)
# 实例化空间注意力机制
self.spatial_attention = spatial_attention(kernel_size=kernel_size)
# 前向传播
def forward(self, inputs):
# 先将输入图像经过通道注意力机制
x = self.channel_attention(inputs)
# 然后经过空间注意力机制
x = self.spatial_attention(x)
return x
结果:
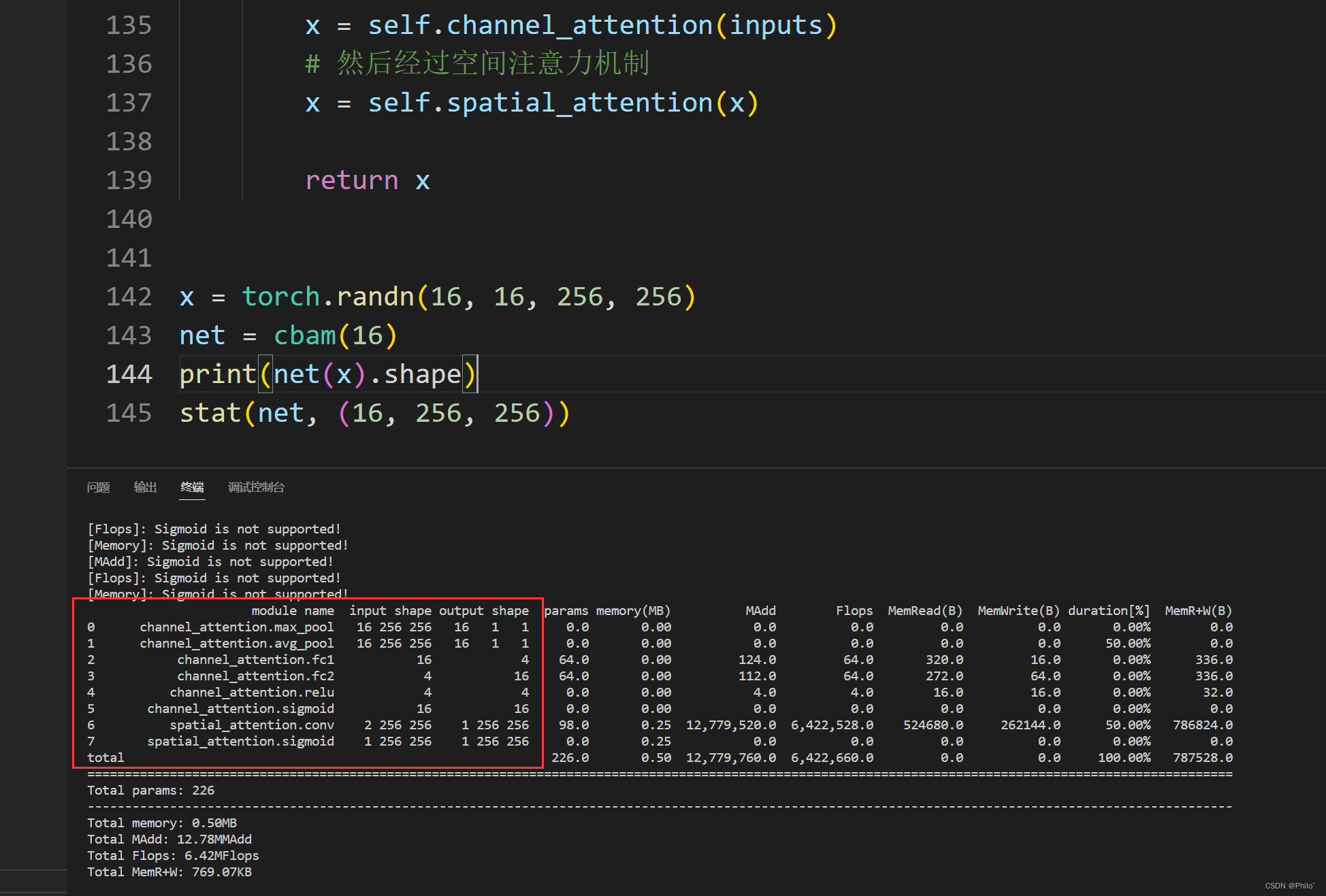
4 展示网络层具体信息
安装包
pip install torchstat
使用
from torchstat import stat
net = cbam(16)
stat(net, (16, 256, 256)) # 不需要Batch维度
注意力机制后期学习到再持续更新!!
参考博客:
CNN注意力机制
ECANet