目前接触过两种雷达和惯导同步的方式:
1.惯导输出gprms和pps信号给米文系统,雷达驱动从系统里读取时间。
2.惯导输出gprms和pps信号给雷达,雷达驱动从雷达数据读取时间。
GPRMS和PPS的内容参考:STM32模拟GPS输出PPS、GPRMC与VLP16时钟同步
一. Wiresshark 查看lidar数据
讲本机的ip地址更改为192.168.1.102
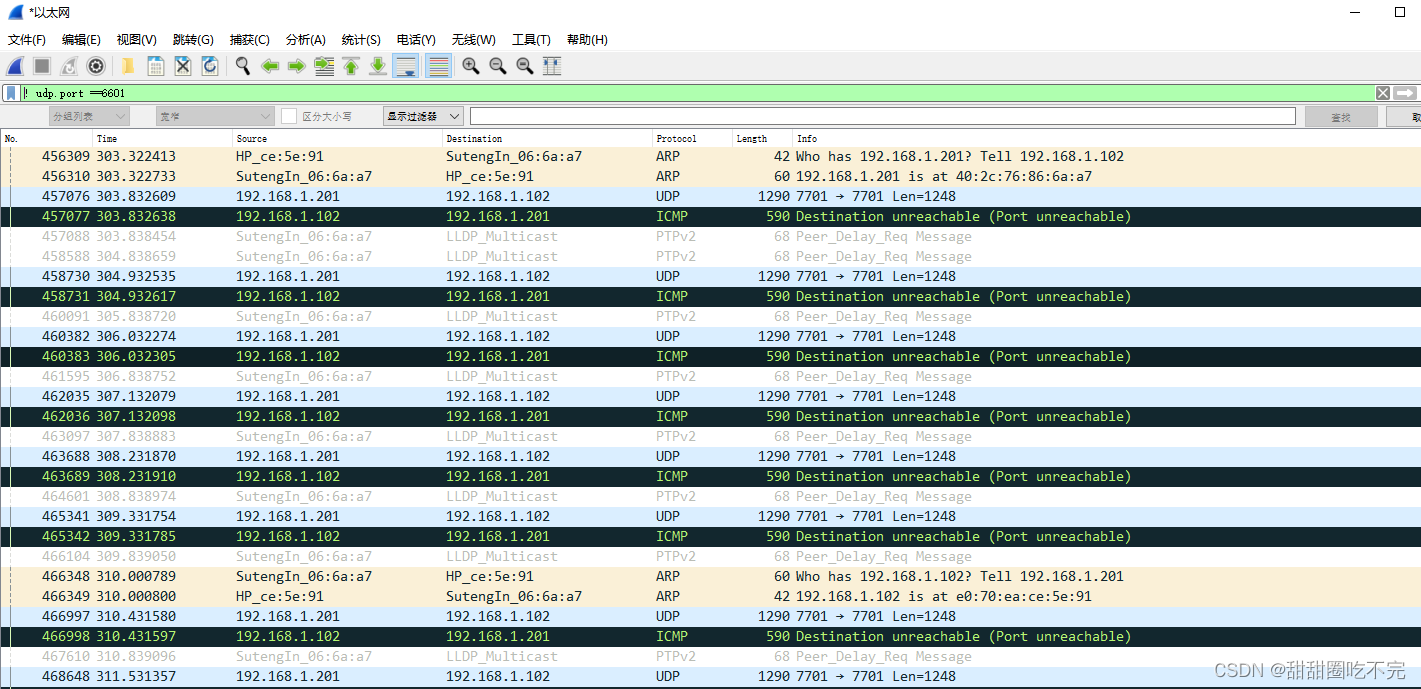
通过Wiresshark软件可以查看数据接收否正常,其中的搜索为:
! udp.port == 6601
搜索6601的内容
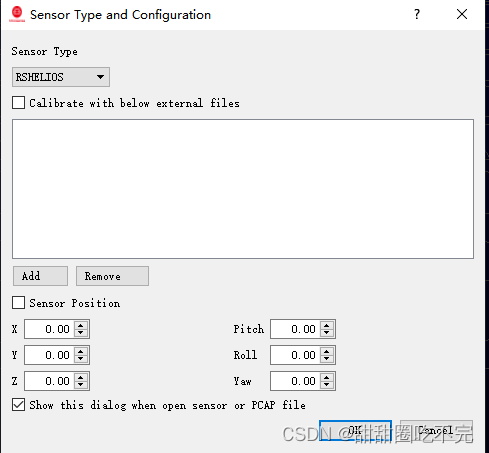
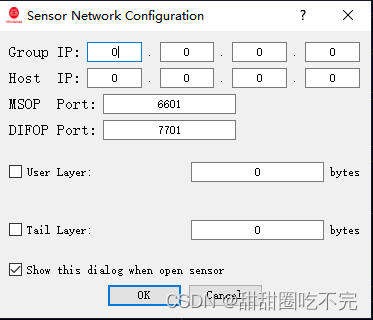
二. rsviewer 查看lidar数据
通过rsviewer查看lidar数据,点击 file -> open sensor 按照下图进行设置,数据不正常时检查 msop port和difop port。默认为6602和7702.
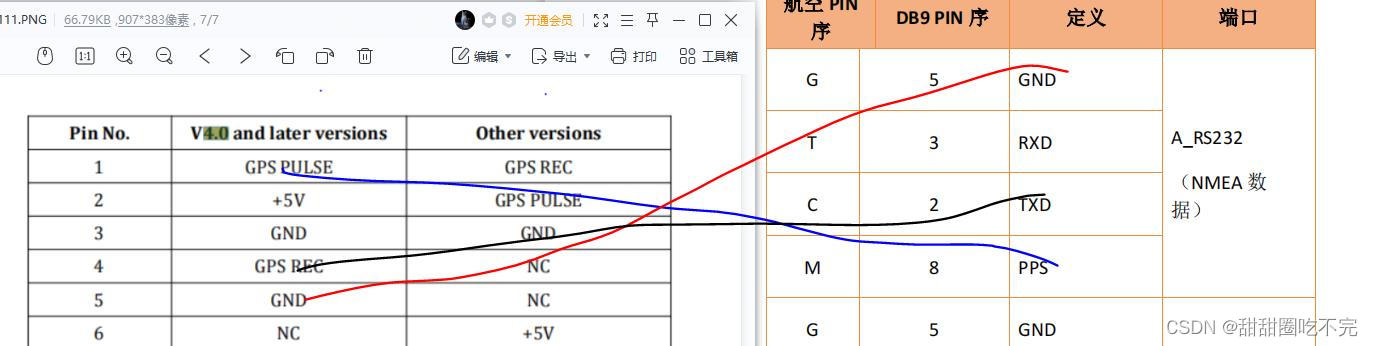
三. 惯导同步接线
接线顺序如下图。
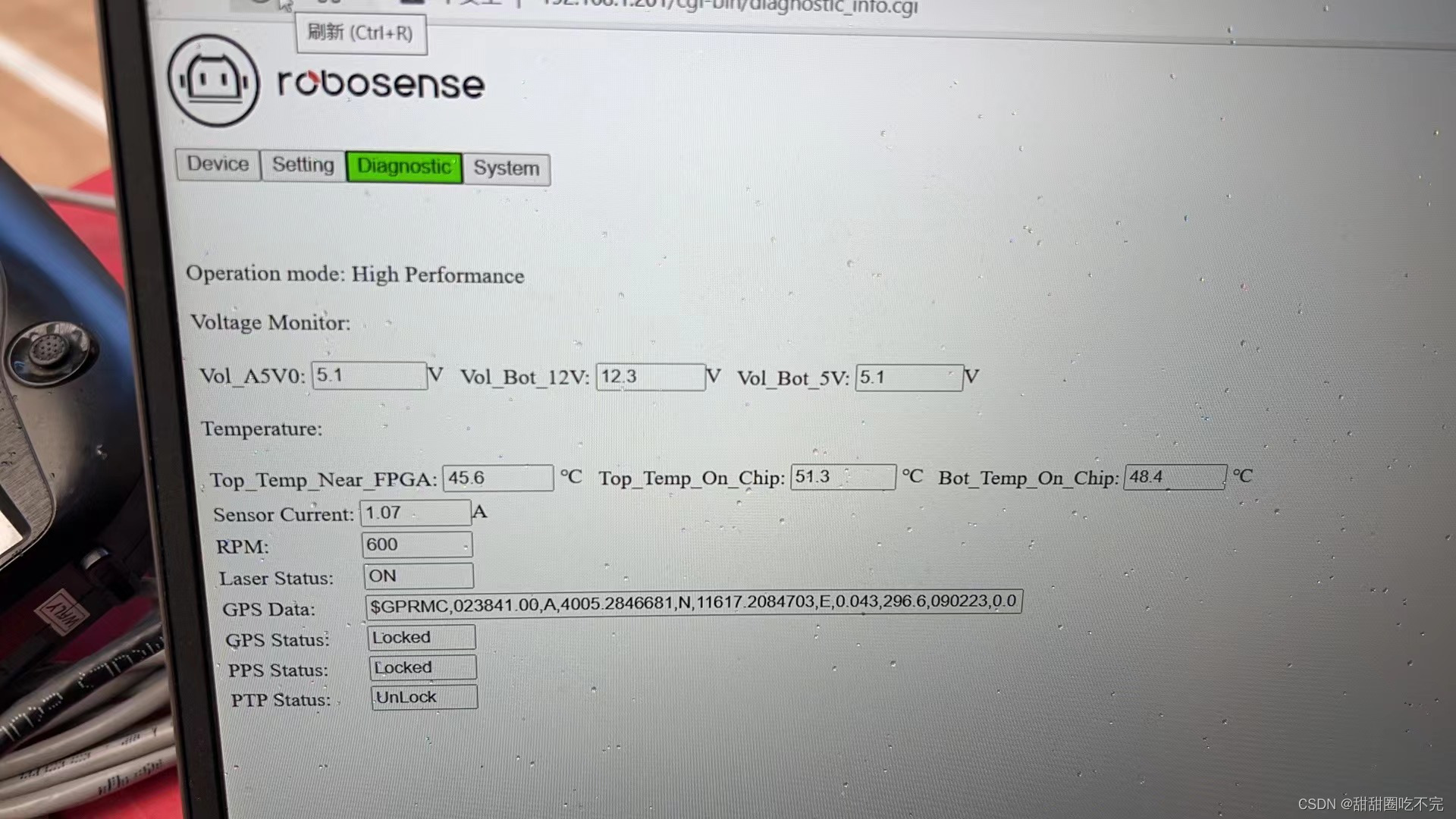
四. lidar同步设置及查看同步结果
连接lidar后打开连接:192.168.1.201
在setting中将时间同步改为GPS
在网页中可以查看时间同步是否成功,