雷达设备
- 1.题目
- 2.基本思想
- 3.代码实现
1.题目
假设海岸是一条无限长的直线,陆地位于海岸的一侧,海洋位于另外一侧。
每个小岛都位于海洋一侧的某个点上。
雷达装置均位于海岸线上,且雷达的监测范围为 d,当小岛与某雷达的距离不超过 d时,该小岛可以被雷达覆盖。
我们使用笛卡尔坐标系,定义海岸线为 x 轴,海的一侧在 x轴上方,陆地一侧在 x 轴下方。
现在给出每个小岛的具体坐标以及雷达的检测范围,请你求出能够使所有小岛都被雷达覆盖所需的最小雷达数目。
输入格式
第一行输入两个整数 n和 d,分别代表小岛数目和雷达检测范围。
接下来 n 行,每行输入两个整数,分别代表小岛的 x,y轴坐标。
同一行数据之间用空格隔开。
输出格式
输出一个整数,代表所需的最小雷达数目,若没有解决方案则所需数目输出 −1。
数据范围
1
≤
n
≤
1000
1≤n≤1000
1≤n≤1000,
−
1000
≤
x
,
y
≤
1000
−1000≤x,y≤1000
−1000≤x,y≤1000
输入样例:
3 2
1 2
-3 1
2 1
输出样例:
2
2.基本思想
贪心 O(nlogn)
如下图所示,对于任意一个小岛 (x,y)我们都可以在海岸线上求出能覆盖该小岛的建造雷达的区间 [a,b]
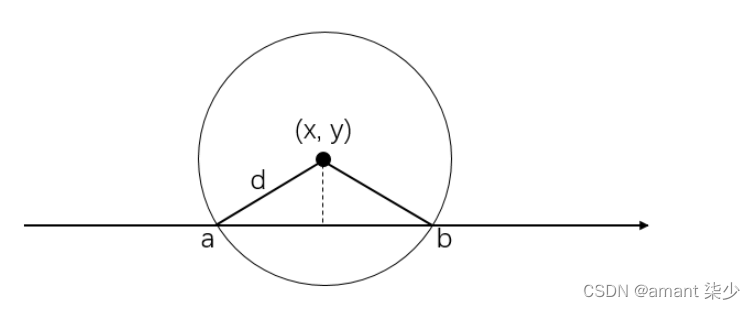
由勾股定理可知:

将所有小岛转化成区间后,问题转化为:给定 n 个区间,在 x 轴上选择尽量少的点,使得所有区间至少包含一个点。
算法步骤:
- 1.将所有区间按右端点从小到大排序;
-
- 依次考虑每个区间:
如果当前区间包含最后一个选择的点,则直接跳过;
如果当前区间不包含最后一个选择的点,则在当前区间的右端点的位置选一个新的点;
- 依次考虑每个区间:
3.代码实现
import java.util.Arrays;
import java.util.Scanner;
public class Main {
static Scanner sc = new Scanner(System.in);
static int N = 1010;
static Pair seg[] = new Pair[N];
static double esp = 10e-6;
static class Pair implements Comparable<Pair> {
double l, r;
public Pair(double l, double r) {
this.l = l;
this.r = r;
}
@Override
public int compareTo(Pair o) {
return Double.compare(this.r, o.r);
}
}
public static void main(String[] args) throws Exception {
int n = sc.nextInt();//小岛数
int d = sc.nextInt();//雷达半径
for (int i = 1; i <= n; i++) {
int x = sc.nextInt();
int y = sc.nextInt();
if (y > d) {
System.out.println("-1");
return;
}
double len = Math.sqrt(d * d - y * y);
//每个岛 投射到x轴上的左、右端点
seg[i] = new Pair(x - len, x + len);
}
//对所有区间 排序
Arrays.sort(seg, 1, n + 1);
int res = 0;
double lastNode = Integer.MIN_VALUE; //上一个雷达位置
//以上一个点的右端点 判断是否在当前区间的左端点内
for (int i = 1; i <= n; i++) {
if (seg[i].l > lastNode) { //下一段区间的起始点在上一个雷达的右边 即没有交集 则需要加入新的雷达
res++;
lastNode = seg[i].r;//更新
}
}
System.out.println(res);
}
}







![[Android开发基础4] 意图与意图过滤器](https://img-blog.csdnimg.cn/38bd5d4445c043c4bc2b486d2ca4c82d.png)