队列的使用
- 前言
- 创建队列
- 发送数据
- 接收数据
- 查询队列数据个数
- 使用示例
- 创建两个线程
- 配置按键驱动
- 编写按键发送子函数
- 编写按键读取子函数
前言
基于 FreeRTOS 的应用程序由一组独立的任务构成——每个任务都是具有独立权限的小程序。这些独立的任务之间很可能会通过相互通信以提供有用的系统功能。FreeRTOS 中所有的通信与同步机制都是基于队列实现的;
创建队列
队列是具有自己独立权限的内核对象,并不属于或赋予任何任务。所有任务都可以向同一队列写入和读出。一个队列由多方写入是经常的事,但由多方读出倒是很少遇到。
xQueueHandle xQueueCreate( unsigned portBASE_TYPE uxQueueLength,
unsigned portBASE_TYPE uxItemSize );
unsigned portBASE_TYPE uxQueueLength:指定队列的长度,即最多可以存放的元素个数
unsigned portBASE_TYPE uxItemSize:队列中存储的元素的大小(占用的字节数)
返回值:返回NULL代表创建失败,没有足够的堆空间来创建当前队列;创建成功则返回队列的句柄。
发送数据
xQueueSendToBack()用于将数据发送到队列尾;而 xQueueSendToFront()用于将数据发送到队列首,这两个函数在中断中不可使用,在中断中应该采用xQueueSendToFrontFromISR()和xQueueSendToBackFromISR()他们可以在中断中实现和前面两个函数相同的功能(下一章节中断再说明);
portBASE_TYPE xQueueSendToFront( xQueueHandle xQueue,
const void * pvItemToQueue,
portTickType xTicksToWait );
portBASE_TYPE xQueueSendToBack( xQueueHandle xQueue,
const void * pvItemToQueue,
portTickType xTicksToWait );
xQueueHandle xQueue:目标队列的句柄。
const void * pvItemToQueue:入队元素的指针。队列将存储此指针指向的数据的备份。
portTickType xTicksToWait:指定等待队列有空间可以容纳新元素入队的最长等待(阻塞)时间,这种情况发生在队列已经满了的时候。如果需要等待,则任务会因为调用这个函数而进入阻塞状态,直到队列非满而能让这个任务写入数据或者指定的阻塞时间过期,才会转变为就绪态。如果此参数使用0,则当队列已经满了的时候,此函数立即返回而不阻塞。使用portMAX_DELAY作为参数将使得等待时间为无限长,直到队列非满而能让这个任务写入数据,注意如果要使用portMAX_DELAY为参数,则必须在FreeRTOSConfig.h将INCLUDE_vTaskSuspend定义为1。
返回值:
pdPASS,当元素成功入队时返回pdPASS。例如,在限定超时时间(xTicksToWait非0)过期前成功入队。
errQUEUE_FULL,因为队列满而无法入队时返回errQUEUE_FULL。例如,在限定超时时间(xTicksToWait非0)过期后,队列一直为满而无法入队新元素。
由于队列可以被多个任务写入,所以对单个队列而言,也可能有多个任务处于阻塞状态以等待队列空间有效。这种情况下,一旦队列空间有效,只会有一个任务会被解除阻塞,这个任务就是所有等待任务中优先级最高的任务。而如果所有等待任务的优先级相同,那么被解除阻塞的任务将是等待最久的任务;
接收数据
xQueueReceive()用于从队列中接收(读取)数据单元。接收到的单元同时会从队列中删除。xQueuePeek()也是从从队列中接收数据单元,不同的是并不从队列中删出接收到的单元。xQueuePeek()从队列首接收到数据后,不会修改队列中的数据,也不会改变数据在队列中的存储序顺。
在中断中应该采用数 xQueueReceiveFromISR()(下一章节中断再说明);
portBASE_TYPE xQueueReceive( xQueueHandle xQueue,
const void * pvBuffer,
portTickType xTicksToWait );
portBASE_TYPE xQueuePeek( xQueueHandle xQueue,
const void * pvBuffer,
portTickType xTicksToWait );
xQueueHandle xQueue:目标队列的句柄。
const void * pvBuffer:用于存放读取到的队列元素的缓冲区,队列将把出队的元素拷贝到此缓冲区中。
portTickType xTicksToWait:参见xQueueSendToBack()函数的解释。
返回值:
pdPASS,当成功从队列读取到元素时返回pdPASS。例如,在限定超时时间(xTicksToWait非0)过期前,成功读取到元素。
errQUEUE_EMPTY,因为队列空而无法出队时返回errQUEUE_EMPTY。例如,在限定超时时间(xTicksToWait非0)过期后,队列一直为空而无法读取元素。
由于队列可以被多个任务读取,所以对单个队列而言,也可能有多个任务处于阻塞状态以等待队列数据有效。这种情况下,一旦队列数据有效,只会有一个任务会被解除阻塞,这个任务就是所有等待任务中优先级最高的任务。而如果所有等待任务的优先级相同,那么被解除阻塞的任务将是等待最久的任务;
简单来说就是写队列和读队列是有先后顺序的,优先级高的先读写,优先级相同的情况下根据等待时间来判断,等待时间长的先读写;
查询队列数据个数
uxQueueMessagesWaiting()用于查询队列中当前有效数据单元个数,中断中使用uxQueueMessagesWaitingFromISR()替代;
unsigned portBASE_TYPE uxQueueMessagesWaiting( xQueueHandle xQueue );
xQueueHandle xQueue:队列的句柄
返回值:队列中的元素个数,返回0代表队列为空
使用示例
创建两个线程
创建一个入队的线程和一个出队的线程
xTaskCreate((TaskFunction_t )SenderTask, /* 任务入口函数 */
(const char* )"send", /* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )10, /* 任务的优先级 */
NULL); /* 任务控制块指针 */
xTaskCreate((TaskFunction_t )RevcerTask, /* 任务入口函数 */
(const char* )"revc", /* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )10, /* 任务的优先级 */
NULL); /* 任务控制块指针 */
配置按键驱动
打开cubemx工程
配置引脚重新生成工程,这里需要注意生成完工程我们工程中前面的更改就需要重新做了,比如讲__NVIC_PRIO_BITS的4U改成4,屏蔽三个中断服务函数;
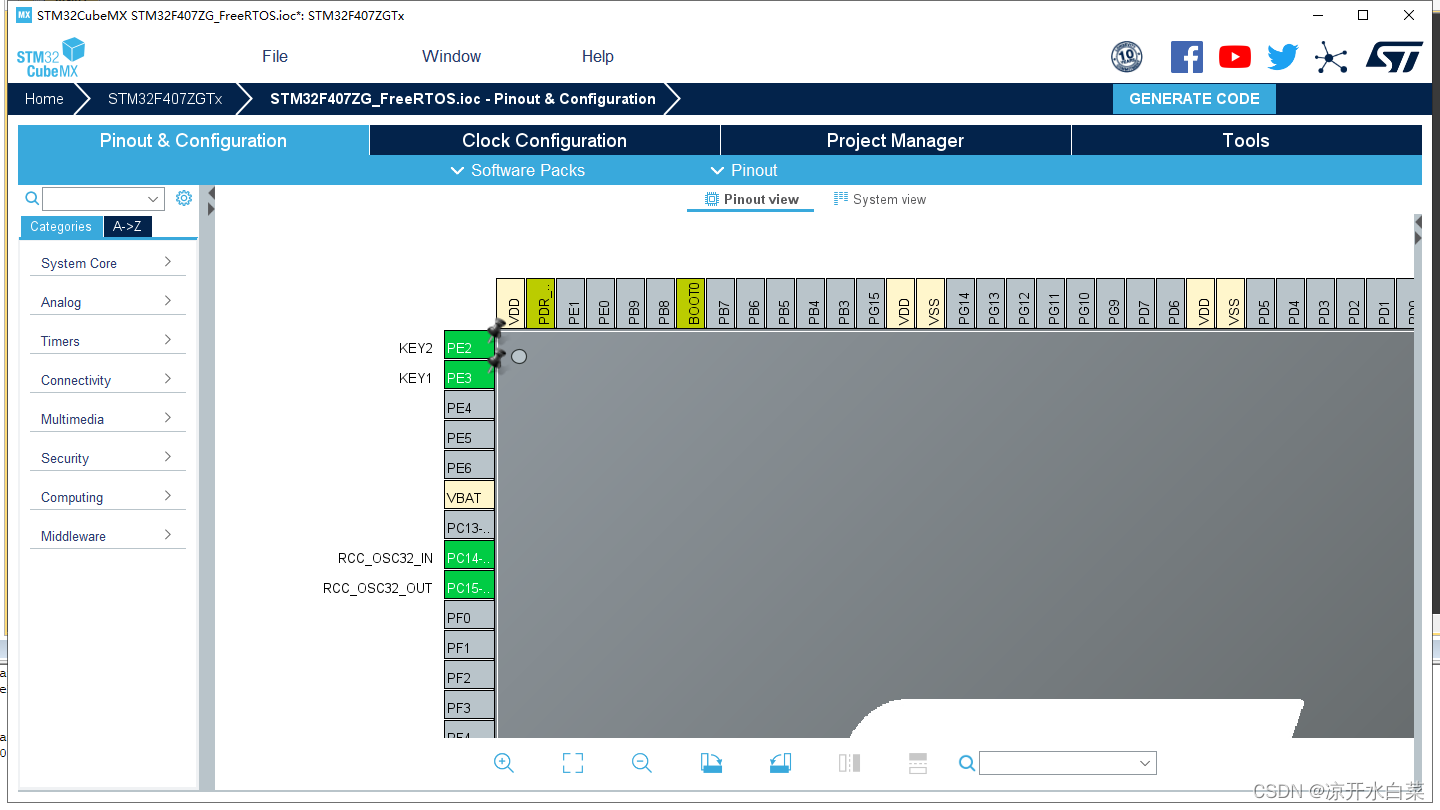
还需要注意的是配置正点原子的板子按键引脚需要上拉;
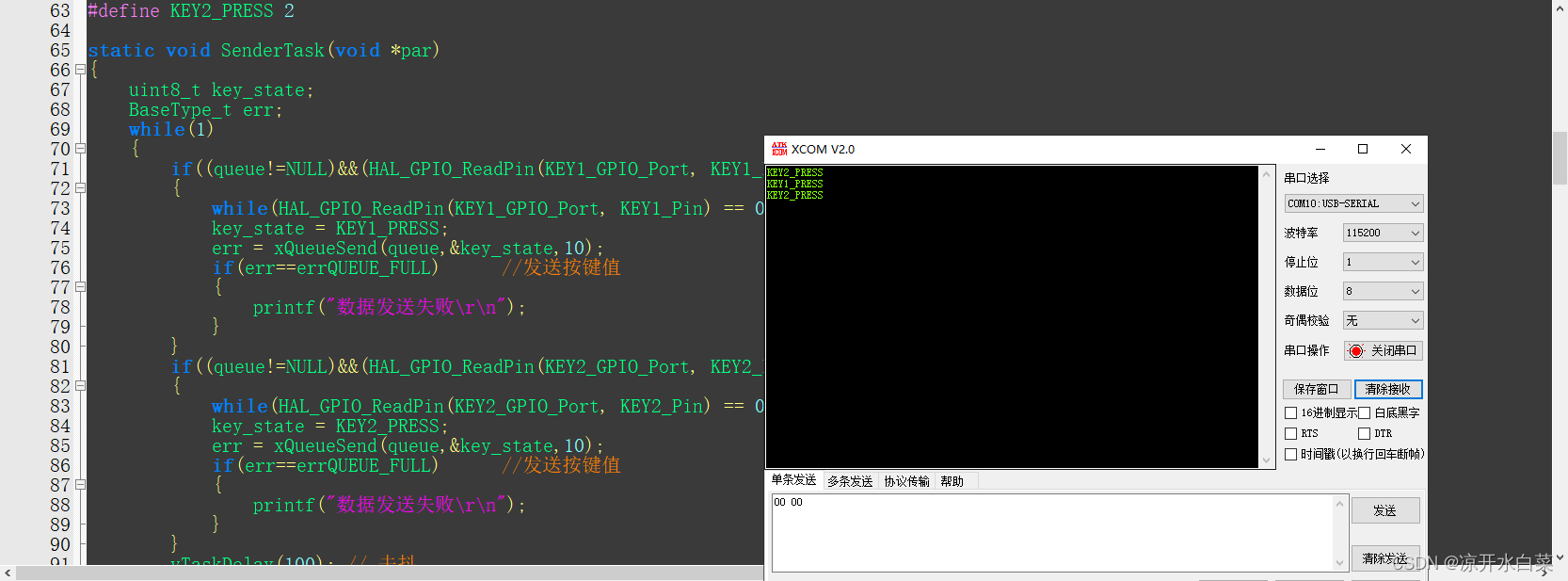
编写按键发送子函数
static void SenderTask(void *par)
{
uint8_t key_state;
BaseType_t err;
while(1)
{
if((queue!=NULL)&&(HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == 0))
{
while(HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == 0); // 按键弹起
key_state = KEY1_PRESS;
err = xQueueSend(queue,&key_state,10);
if(err==errQUEUE_FULL) //发送按键值
{
printf("数据发送失败\r\n");
}
}
if((queue!=NULL)&&(HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin) == 0))
{
while(HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin) == 0);
key_state = KEY2_PRESS;
err = xQueueSend(queue,&key_state,10);
if(err==errQUEUE_FULL) //发送按键值
{
printf("数据发送失败\r\n");
}
}
vTaskDelay(100); // 去抖
}
}
编写按键读取子函数
static void RevcerTask(void *par)
{
uint8_t key = 0;
while(1)
{
if(queue!=NULL)
{
if(xQueueReceive(queue,&key,portMAX_DELAY))//请求消息Key_Queue
{
switch(key)
{
case KEY1_PRESS:
printf("KEY1_PRESS\r\n");
break;
case KEY2_PRESS:
printf("KEY2_PRESS\r\n");
break;
default:break;
}
}
}
vTaskDelay(10);
}
}
实验效果
后面的资源都会在这个连接更新
链接:https://pan.baidu.com/s/1nc1rfyLiMyw6ZhxiZ1Cumg?pwd=free
提取码:free