本文编辑:调皮哥的小助理
1.引言
如果文章能够给你带来价值,希望能够关注我。
如果文章能够让你学习到知识,希望你能够点个赞!
好了下面开始今天的学习内容吧。
今天给大家分享的是 《TI 的IWR1642毫米波雷达使用串口原始数据采集与分析》。通常TI的系列雷达如IWR1642、IWR6843采集长时间的数据都是需要使用DCA1000的,不过我们用于学习毫米波雷达传感器的基础知识,其实可以不需要使用DCA1000,使用串口就可以采集到一帧的数据了。
2.内存资源估计
因为串口采集的数据首先是存储在IWR1642的内存里的,经过我对内存的资源估计,发现最多也就只能存储一帧的数据。
IWR1642雷达数据内存(Radar Data Memory)大概是768KB,也就是DSP核内部存储块L3资源总大小为768KB,主要是用来存储雷达数据。
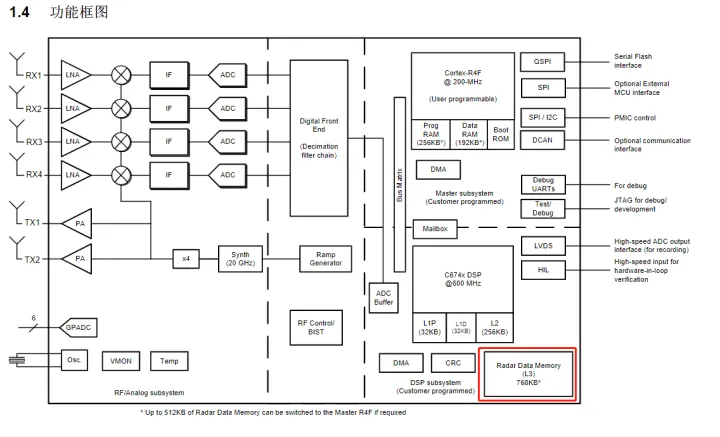
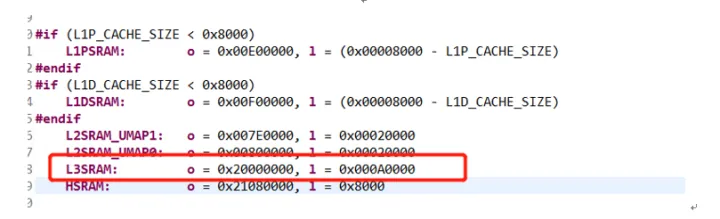
进入工程里面去看,L3的起始地址是0x200A0000,长度是0x000A0000,存储位宽是32位。
(1)可存储的数据大小计算
AD的采样率是2.5M,数据位宽是16bit,一共四个接收天线,四个AD通道。
因此一秒钟的数据大小是2.516/84=20M。
一个chirp的时间约为180us,因此一个chirp所占用的内存为20MB*180us=3.6KB。
而一个CPI原本为128个占用大小为128*3.6KB=460KB。因此,理论上L3内存只能够存一个CPI的数据。
(上述结论为自己计算的,如果计算出错,请指正!)
其实一帧的数据,虽然不可以实时地长时间采集,但是也足够用来做毫米波雷达的学习或者实验教学了。基本上可学习到、测距、测速、测角、CFAR以及聚类,而且串口采集数据比较简单,可谓是“一键操作”,方便又快捷。
3.基本操作
(1)使用Uniflash固化编译好的xwr16xx_mmw_demo.bin文件;
(2)上电,打开MATLAB程序,修改好串口号,点击运行,即可开始一帧数据的采集了。
(3)采集完成之后,输出的是2D-FFT的结果。
4.数据格式说明
发射天线:2个;
接收天线:4个;
一帧数据的脉冲数:128个(两个脉冲交替各发射128次)
ADC采样点数:128个
ADC位数:16bit(两个字节组成一个十进制数)
采样形式:IQ正交采样(两个十进制数组成一个复数,I+jQ);
ADC采样率为:2.5Msps。
故而,串口收到的字节数为:241281282*2=524288(个)。
收到的十进制数的个数为:字节数/2 =524288/2 = 262144(个)。
收到的复信号数据个数为:10进制数的个数/2 =262144/2 = 131027(个)。
正好也符合复信号个数为:1281282*4= 131072(个),即表示两个发射天线,四个接收天线,一共128个交替脉冲,每个脉冲一共128个采样点。
需要注意的是:
当采用虚拟天线模式时,复信号的个数为:1281288= 131072(个),表示一发8收,只有8个接收通道的数据。
当没有采用虚拟天线模式时,复信号的个数为:2561284= 131072(个),表示2发4收,只有4个接收通道,而256表示有256个脉冲。
因为没有使用虚拟天线,两个发射天线的信号都被4个接收天线接收,自然脉冲数会增多2倍。通常我们为了使用TDM-MIMO的角度分辨率,采用的是虚拟天线模式增大角度分辨率。所以数据格式记住是128个脉冲,每个脉冲128个采样点,一共8个接收通道。
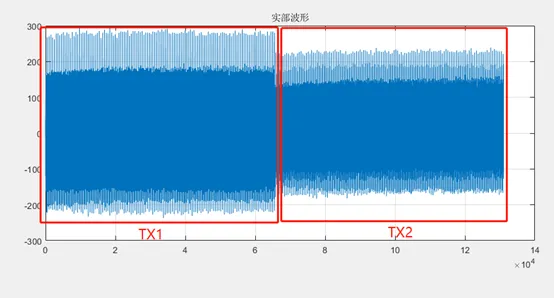
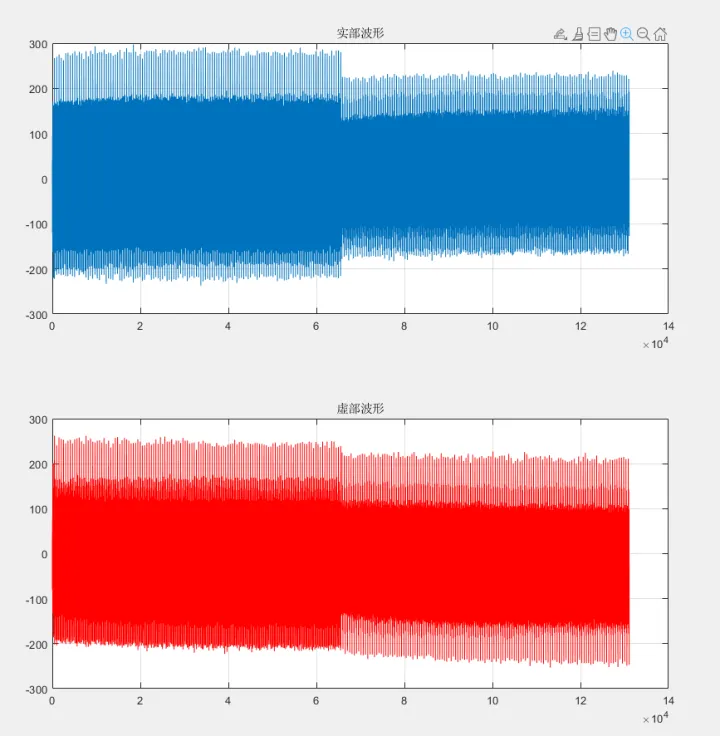
(1) 经过一系列解析,得到信号的实部和虚部时域图,如下:
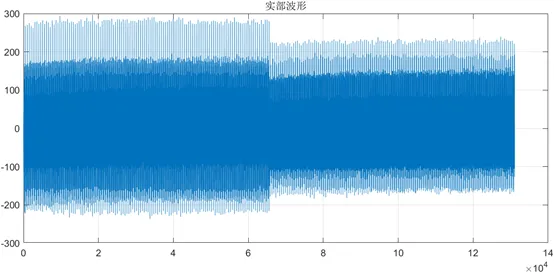
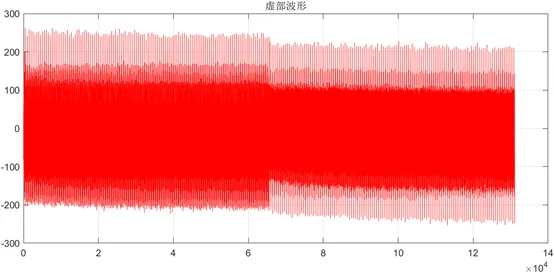
其中,可以看出,信号的前面一半是TX1(第一个发射天线)的128个脉冲在四个接收通道上的数据,一共为1281284= 65536。同理,后一半是TX2的数据。
把上面的实部信号放大了看,只看前5个脉冲,红框的部分就是第一个发射天线(TX1)下,RX1、RX2、RX3、RX4的接受数据,每个RX一共128个点,如下图所示:
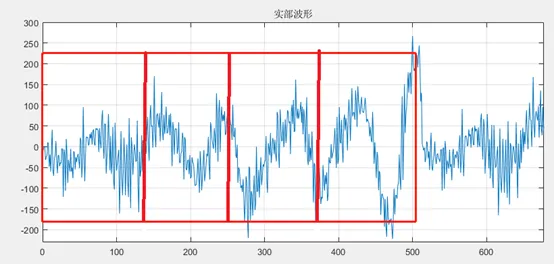
搞清楚前面这些数据的关系与排列形式,那么接下来对信号进行处理那就非常简单了。
5.代码分析
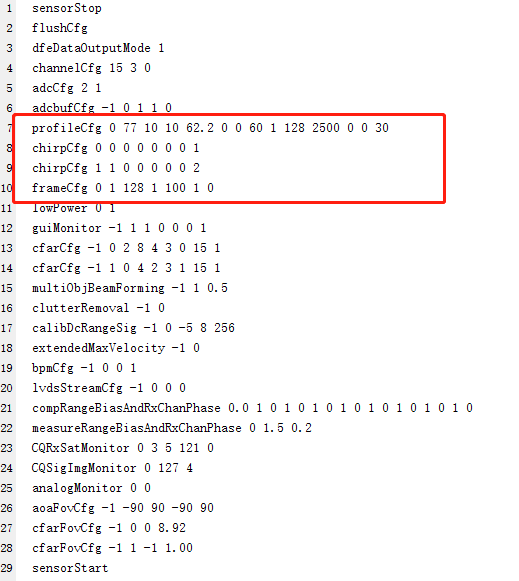
(1)雷达参数设置与坐标计算
雷达参数根据.cfg文件配置,其中.cfg文件由自己配置。
%% 时间2021年10月
%% 作者:调皮连续波
%% 未经许可、禁止转载!
clc;
close all;
clear all;
delete(instrfind);
%%
controlSerialPort = ‘COM43’; %预先设定USER COM
dataSerialPort = ‘COM44’; %预先设定DATA COM
%% 雷达参数
Tx_Number = 2; %发射天线
Rx_Number = 4; %接收天线
Range_Number = 128; %距离点数(每个脉冲256个点)
Doppler_Number = 128; %多普勒通道数(总共16个重复脉冲数)
global Params;
Params.NChirp = Doppler_Number; %1帧数据的chirp个数
Params.NChan = Rx_Number; %RxAn数,ADC通道数
Params.NSample = Range_Number; %每个chirp ADC采样数
Params.Fs = 2.5e6; %采样频率
Params.c = 3.0e8; %光速
Params.startFreq = 77e9; %起始频率
Params.freqSlope = 60e12; %chirp的斜率
Params.bandwidth = 3.072e9; %真实带宽
Params.lambda=Params.c/Params.startFreq; %雷达信号波长
Params.Tc = 144e-6; %chirp周期
global FFT2_mag;
%% 坐标计算
[X,Y] = meshgrid(Params.c*(0:Params.NSample-1)*Params.Fs/2/Params.freqSlope/Params.NSample, …
(-Params.NChirp/2:Params.NChirp/2 - 1)*Params.lambda/Params.Tc/Params.NChirp/2);
%%
(2)雷达配置命令下发与数据接收
%%
loadCfg = 1; % 下发命令标志
configurationFileName_stop =‘iwr1642.cfg’; % 雷达停止命令
cliCfg = readCfg(configurationFileName_stop); % 配置文件读取
if(loadCfg)
hdataSerialPort = configureDataSport(dataSerialPort,Tx_NumberRx_NumberDoppler_NumberRange_Number22);%链接 COM串口
mmwDemoCliPrompt = char(‘mmwDemo:/>’);
hControlSerialPort = configureControlPort(controlSerialPort);%链接 COM串口
%Send CLI configuration to IWR16xx
fprintf(‘Sending configuration from %s file to IWR16xx …\n’, configurationFileName_stop);
for k=1:length(cliCfg)
fprintf(hControlSerialPort, cliCfg{k});
fprintf(‘%s\n’, cliCfg{k});
echo = fgetl(hControlSerialPort); % Get an echo of a command
done = fgetl(hControlSerialPort); % Get “Done”
prompt = fread(hControlSerialPort, size(mmwDemoCliPrompt,2)); % Get the prompt back
end
prompt_1= fread(hdataSerialPort, Tx_NumberRx_NumberDoppler_NumberRange_Number22); % Get the prompt back
%% 可在此保存数据
adc_data = dec2hex(prompt_1,2);
end
fclose(hControlSerialPort);
delete(hControlSerialPort);
fclose(hdataSerialPort);
delete(hdataSerialPort);
(3) 数据读取、拆分、组合
% 读取数据
% Data_hex=textread(‘data_2.txt’,‘%s’)';%读出采集的数据
Data_dec=hex2dec(adc_data); %将16进制转换为10进制
% 组合数据
Data_zuhe=zeros(1,Tx_NumberRx_NumberDoppler_NumberRange_Number2); %建立计算存储数据的空矩阵
for i=1:1:Tx_NumberRx_NumberDoppler_NumberRange_Number2
Data_zuhe(i) = Data_dec((i-1)*2+1)+Data_dec((i-1)2+2)256;%两个字节组成一个数,第二个字节乘以256相当于左移8位。
if(Data_zuhe(i)>32767)
Data_zuhe(i) = Data_zuhe(i) - 65536; %限制幅度
end
end
%% 分放数据
ADC_Data=zeros(Tx_Number,Doppler_Number,Rx_Number,Range_Number2); %建立计算存储数据的空矩阵
for t=1:1:Tx_Number
for i=1:1:Doppler_Number
for j=1:1:Rx_Number
for k=1:1:Range_Number2 %实部虚部
ADC_Data(t,i,j,k) = Data_zuhe(1,(((t-1)*Doppler_Number+(i-1))*Rx_Number+(j-1))Range_Number2+k);%时域数据排列顺序为 TX1 TX2
end
end
end
end
(4)时域图
%% 打印全部的实虚数据
Re_Data_All=zeros(1,Range_NumberDoppler_NumberTx_NumberRx_Number); %建立计算存储数据的空矩阵
Im_Data_All=zeros(1,Range_NumberDoppler_NumberTx_NumberRx_Number); %建立计算存储数据的空矩阵
% 虚部实部分解
for i=1:1:Tx_NumberRx_NumberDoppler_NumberRange_Number2
Im_Data_All(1,i) = Data_zuhe(1,(i-1)2+1);
Re_Data_All(1,i) = Data_zuhe(1,(i-1)2+2);
end
% 原始信号实部、虚部图形绘制
figure()
subplot(2,1,1);
plot(Im_Data_All(1,:));title(‘实部波形’);grid on;
subplot(2,1,2);
plot(Re_Data_All(1,:),‘r’);title(‘虚部波形’);grid on;
%% 打印分组后的实虚数据 数据结构为:2T4R在TX2组的16个脉冲数据
Re_Data=zeros(Doppler_Number,Range_Number); %建立计算存储数据的空矩阵
Im_Data=zeros(Doppler_Number,Range_Number); %建立计算存储数据的空矩阵
for chirp=1:Doppler_Number %查看所在chirp的数据
% figure();
for j=1:1:Tx_Number
for k=1:1:Rx_Number
for i=1:1:Range_Number
Re_Data(chirp,i) = ADC_Data(j,chirp,k,(i-1)2+2);
Im_Data(chirp,i) = ADC_Data(j,chirp,k,(i-1)2+1);
end
% subplot(Tx_Number,Rx_Number,(j-1)Rx_Number+k);
% plot(Im_Data(1,:));title([num2str(j) ‘T’ num2str(k) ‘R虚部波形’]);grid on;
end
end
end
%% 虚部+实部数据重组得到复信号 25642162
ReIm_Data = complex(Re_Data,Im_Data); %这里只用虚拟天线的最后一组数据。原本数据大小应该是162568=32768,现在只有16256*1=4096。
% Im_Data1=reshape(Im_Data,1,[]);
% figure();
% plot(Im_Data1);
(5)输出1D-FFT结果
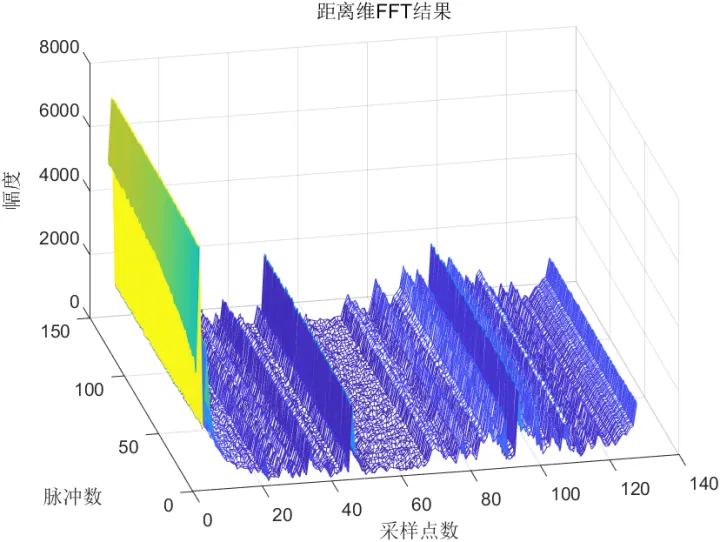
%% 1D FFT
fft1d= zeros(Doppler_Number,Range_Number);
for chirp_fft=1:Doppler_Number
fft1d(chirp_fft,:) = fft((ReIm_Data(chirp_fft,:)));
end
FFT1_mag=abs(fft1d);
figure();
mesh(FFT1_mag);
xlabel(‘采样点数’);ylabel(‘脉冲数’);zlabel(‘幅度’);
title(‘距离维FFT结果’);
(6)输出2D-FFT结果
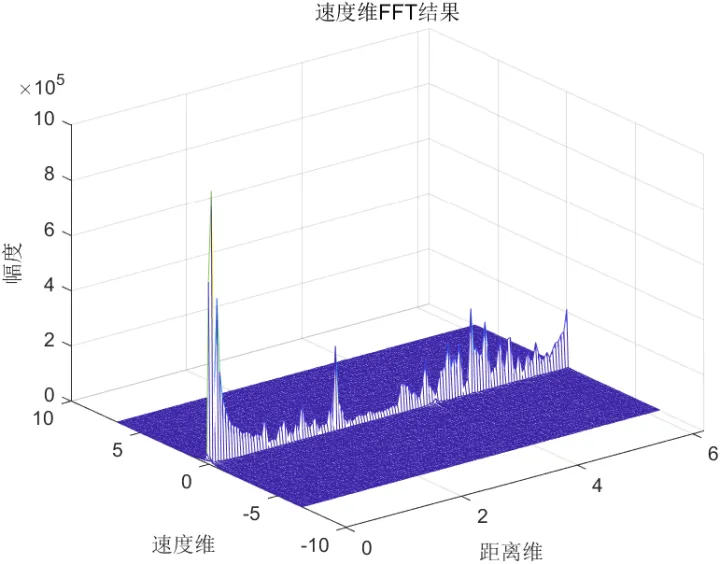
%% 2D FFT
fft2d= zeros(Doppler_Number,Range_Number);
for chirp_fft=1:Range_Number
fft2d(:,chirp_fft) =fftshift( fft((fft1d(:,chirp_fft))));
end
FFT2_mag=(abs(fft2d));
figure();
mesh(X,Y,FFT2_mag);
xlabel(‘距离维’);ylabel(‘速度维’);zlabel(‘幅度’);
title(‘速度维FFT结果’);
(7)额外的函数
主要是串口链接函数和配置参数解析函数。
function [sphandle] = configureDataSport(comPortString, bufferSize)
% comPortString = [‘COM’ num2str(comPortNum)];
sphandle = serial(comPortString,‘BaudRate’,921600);
% set(sphandle,‘Timeout’,15);
set(sphandle,‘Terminator’, ‘’);
set(sphandle,‘InputBufferSize’, bufferSize);
set(sphandle,‘Timeout’,10);
set(sphandle,‘ErrorFcn’,@dispError);
fopen(sphandle);
end
function [sphandle] = configureControlPort(comPortString)
%if ~isempty(instrfind(‘Type’,‘serial’))
% disp(‘Serial port(s) already open. Re-initializing…’);
% delete(instrfind(‘Type’,‘serial’)); % delete open serial ports.
%end
%comPortString = [‘COM’ num2str(comPortNum)];
sphandle = serial(comPortString,‘BaudRate’,115200);
set(sphandle,‘Parity’,‘none’)
set(sphandle,‘Terminator’,‘LF’)
fopen(sphandle);
end
function config = readCfg(filename) %读取配置文件
config = cell(1,100);
fid = fopen(filename, ‘r’);
if fid == -1
fprintf(‘File %s not found!\n’, filename);
return;
else
fprintf(‘Opening configuration file %s …\n’, filename);
end
tline = fgetl(fid);
k=1;
while ischar(tline)
config{k} = tline;
tline = fgetl(fid);
k = k + 1;
end
config = config(1:k-1);
fclose(fid);
end
待续。。。。未完!敬请保持关注!