本设计是基于物联网的智能垃圾桶,主要实现以下功能:
1,压力传感器模块采集垃圾重量数据;
2,GPS定位模块采集垃圾桶所在的经纬度数据;
3,人体红外模块检测人体并返回是否有人通过的数据;
4,超声波测距模块采集垃圾桶堆积的高度;
5,电机模拟垃圾桶开盖,当垃圾桶装满时不自动打开当有人靠近时并且语音播报:垃圾桶已满;
6,通过NB-IoT将数据上传至云服务器,NB-IoT模块也可以接收来自于服务器发送过来的指令;
标签:STM32、GPS、NB-IoT、人体红外
题目扩展:智能垃圾桶、蓝牙式垃圾桶、WIFI式垃圾桶
基于NB-IoT的智能垃圾桶系统设计与实现-实物设计 - 电子校园网 (mcude.com)
更多设计可以在特纳斯电子校园网下载
电子校园网 - 特纳斯电子官方网站 (mcude.com)
效果图:
总体资料:

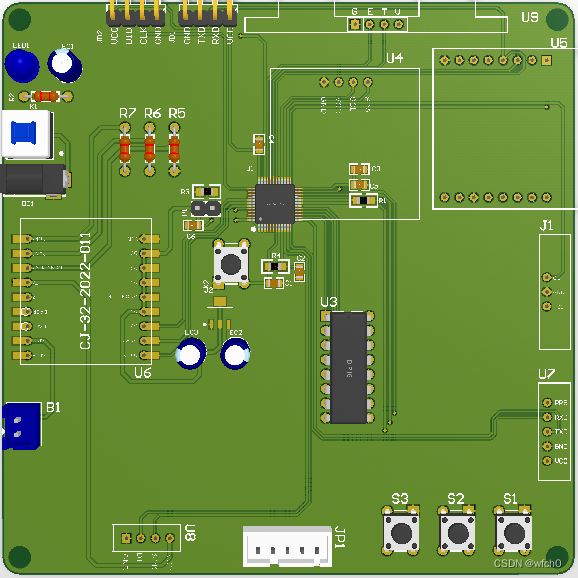
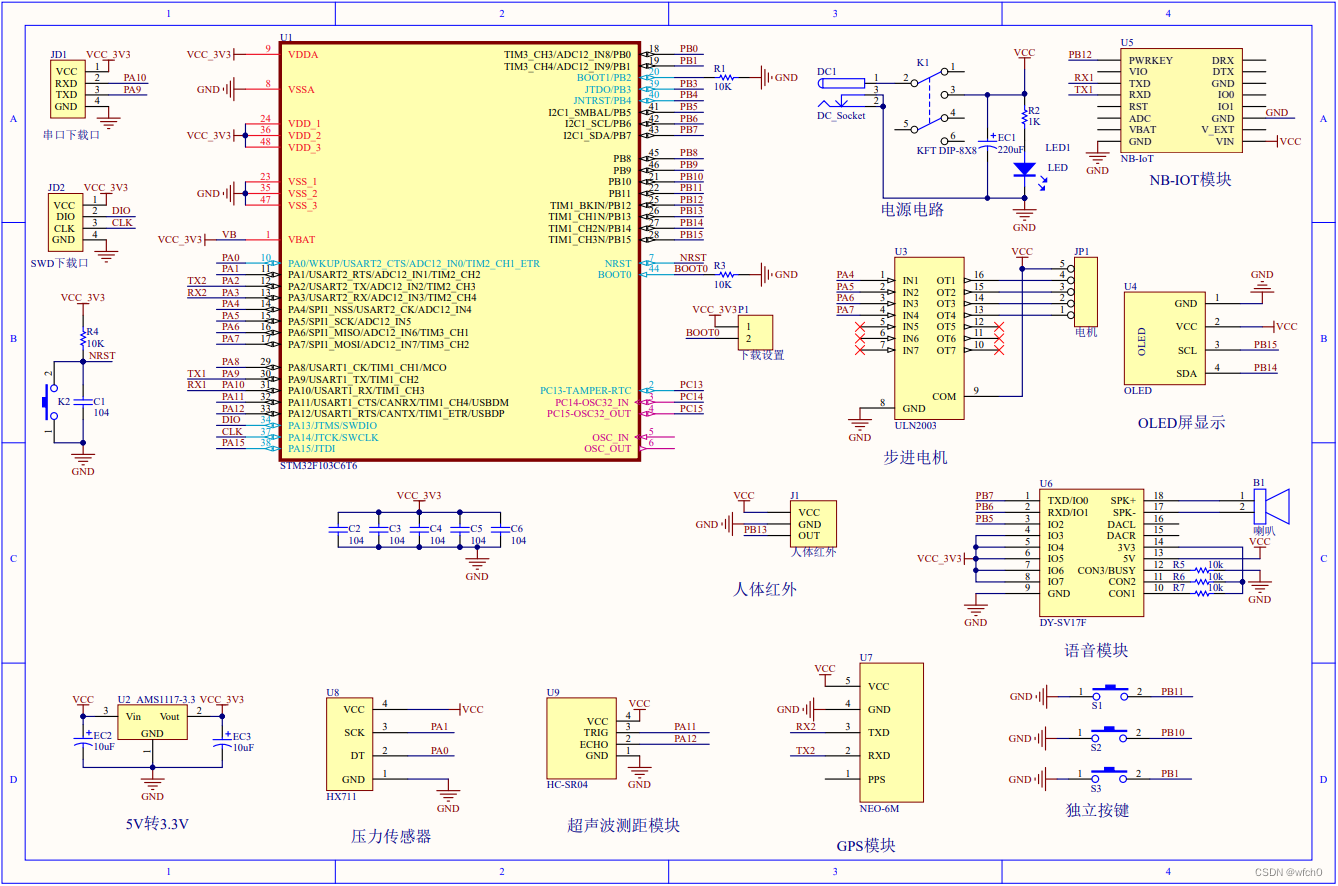
原理图:
软件设计流程:


系统框图:
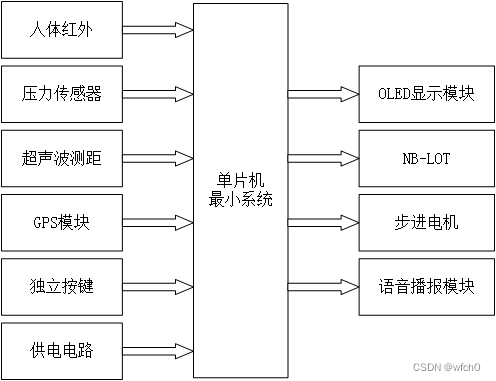
本设计以STM32F103C6T6单片机为核心控制器,加上其他的模块一起组成基于NB-LoT的智能垃圾桶的整个系统,其中包含中控部分、输入部分和输出部分。中控部分采用了STM32F103C6T6单片机,其主要作用是获取输入部分数据,经过内部处理,控制输出部分。输入由六部分组成,第一部分是人体红外,通过该模块检测是否有人判断垃圾桶是否要打开;第二部分是压力检测模块,通过该模块可检测当前垃圾桶的重量;第三部分是超声波测距模块,通过该模块检测垃圾桶内空余的距离;第四部分是GPS模块,通过该模块获取垃圾桶的经纬度;第五部分是独立按键,利用三个独立按键切换模式和开关垃圾桶盖;第六部分是供电电路,给整个系统进行供电。输出由四部分组成,第一部分是OLED显示模块, 显示垃圾桶内的距离、重量、桶盖状态和是否有人;第二部分是NB-LOT无线模块,获取距离和重量之后,通过该模块将数据上传到云服务中;第三部分是步进电机驱动芯片及电机,用该模块模拟垃圾桶盖的打开和关闭;第四部分是语音播报模块,当垃圾桶已满且检测到人时,播报“垃圾桶已满”。