笔者之前想在非ros环境下使用通信,了解到rosjava可以实现,不过后来换成了rosbridge,也搜集了一些rosjava的资料,放在这里供参考(没时间整理了,格式较乱请见谅)
安装方式:sudo apt-get install ros-indigo-rosjava
1.rosjava是什么?
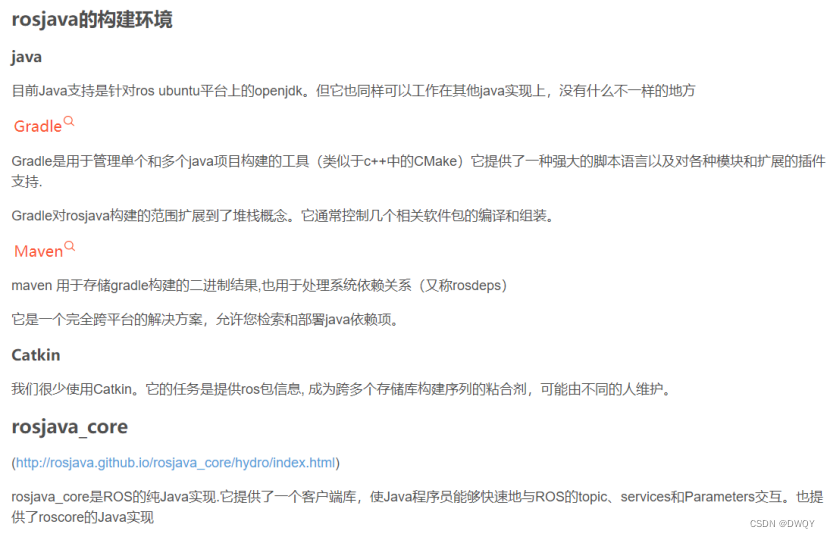
rosjava_core,它是用纯JAVA实现ROS。它提供了一个客户端库是JAVA程序可以快速的调用ROS的Topics,Services, and Parameters
rosjava_core包含库程序:android_gingerbread库程序,它支持的最低版本为APIlevel9。它提供了最基本的RosActivity和NodeMainExecutorService(主要用来获取master和节点的管理),从而执行和管理NodeMain的生命周期,这样就可以像PC中ROS那样工作。载入eclipse以MasterChooser命名,顾名思义就是对Master进行操作,是最重要的库程序。这个库中还包含了其他支持,包括camerapublisher,image view,orientation publisher。里面有范例程序,你可以运行看看这些支持是怎么工作的。
android_honeycomb_mr2所支持的最低版本为APIlevel 13,这个库程序主要用于2D构图和导航,2D激光扫描可视化还有虚拟操作杆,在现阶段暂时用不到
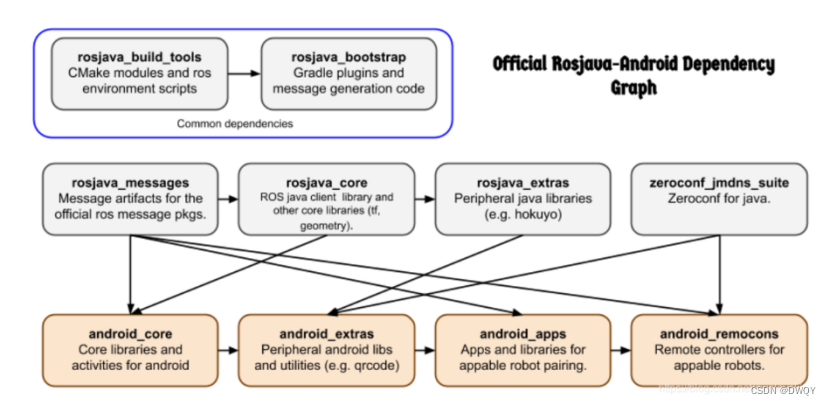
rosjava_build_tools:用来编译rosjava项目的工具
rosjava_bootstrap
genjava:Java ROS message and service generators.
rosjava_messages:Message generation for rosjava.
rosjava_core:客户端库
rosjava_extras:Extra packages for rosjava_core
zeroconf_jmdns_suite:一个特殊的功能包
rocon_rosjava_core:rosjava中关于遥控的功能包
rosjava安装教程:https://blog.csdn.net/qq_23320955/article/details/99711161
rosjava消息通信小demo:http://community.bwbot.org/topic/627/%E5%9C%A8android%E4%B8%AD%E4%BD%BF%E7%94%A8ros
源码:https://github.com/BluewhaleRobot/ROSTest
rosjava工作空间创建指南:https://www.youtube.com/watch?v=lujgeInpejY
rosjava和其他客户端不一样,除了基本的node实现,还提供了自己roscore的实现。可以在安卓手机上建立roscore节点
rosjava组成介绍:http://library.isr.ist.utl.pt/docs/roswiki/rosjava(2f)Overview.html
整体教程:http://library.isr.ist.utl.pt/docs/roswiki/rosjava.html
重点内容:
创建java package、创建node、发布者订阅者、执行node、服务service、消息message、参数、访问参数、使用参数监听、日志
https://rosjava.github.io/rosjava_core/latest/getting_started.html
2.rosjave怎么使用?
3.开源的rosjava项目
https://zhuanlan.zhihu.com/p/499836260
https://zhuanlan.zhihu.com/p/67627891
rosjava本身相当于一个客户端库,用于构建Android程序
参考资料
http://wiki.ros.org/android
http://wiki.ros.org/rosjava
http://wiki.ros.org/android_core
https://github.com/rosjava/rosjava_mvn_repo(半官方包)
https://github.com/turtlebot/turtlebot_android(simple apps for turtlebot development.)
https://github.com/ekumenlabs/base_controller(Android controllers for the Kobuki and the Husky robots.)
http://wiki.ros.org/rosjava/Tutorials/kinetic/No%20Ros%20Installation(没有ros的情况下,用Android配置ros的app)
https://index.ros.org/doc/ros2/(ROS2)
https://www.cnblogs.com/hiram-zhang/p/10410171.html(Android手机端与robot端ROS网络通信)
http://wiki.ros.org/ApplicationsPlatform/Clients/Android/Tutorials/Getting%20Started(Building A ROS Android App)
优秀项目:
https://github.com/rosjava/android_apps
评价:功能齐全,但是没有注释
完整项目:
https://blog.csdn.net/f_season/category_2424137.html
演示视频:https://v.youku.com/v_show/id_XNDg2OTMzNDEy.html