目标检测系列文章
第一章 R-CNN
目录
- 目标检测系列文章
- 📄 论文标题
- 🧠 论文逻辑梳理
- 1. 引言部分梳理 (动机与思想)
- 📝 三句话总结
- 🔍 方法逻辑梳理
- 🚀 关键创新点
- 🔗 方法流程图
- 补充
- 边界框回归 (BBR)
- 1. BBR 的目标与核心思想
- 2. BBR 实现细节
- 输入 (Input)
- 目标变换 (Target Transformation)
- 模型 (Model)
- 训练 (Training)
- 推理/应用 (Inference/Application)
- 3. 关键疑问解答
- Q1: 为什么预测“变换” ( t ∗ t_* t∗) 而不是直接预测坐标 ( G x , G y , G w , G h G_x, G_y, G_w, G_h Gx,Gy,Gw,Gh)?
- Q2: 边界框回归器权重 w ∗ \mathbf{w}_* w∗ 是什么以及如何工作?
- Q3: 为什么还要单独训练一个SVM用作分类器呢?直接把CNN网络微调最后一层分类成21类(1类背景)作为分类器不更直接么
- 一些常见技术:
- 难例挖掘 (Hard Negative Mining):
- 非极大值抑制 Non-Maximum Suppression:
📄 论文标题
R-CNN: Rich feature hierarchies for accurate object detection and semantic segmentation (CVPR 2014)
作者:Ross Girshick ;Jeff Donahue;Trevor Darrell;Jitendra Malik
团队:UC Berkeley
🧠 论文逻辑梳理
1. 引言部分梳理 (动机与思想)
| Aspect | Description (Motivation / Core Idea) |
|---|---|
| 问题背景 (Problem) | 2012 年之前,基于传统手工特征(如 SIFT, HOG)结合机器学习模型(如 SVM, DPM)的目标检测方法性能趋于饱和,遇到了瓶颈。 |
| 机遇 (Opportunity) | 与此同时,深度卷积神经网络 (CNN) 在大规模图像分类任务(如 ImageNet LSVRC)上取得了突破性进展,展现了强大的特征学习和表达能力。 |
| 挑战 (Challenge) | 如何将 CNN 强大的分类能力有效地应用于需要精确定位的目标检测任务?CNN 通常处理固定大小的输入图像,而检测需要在图像不同位置识别不同大小的物体。 |
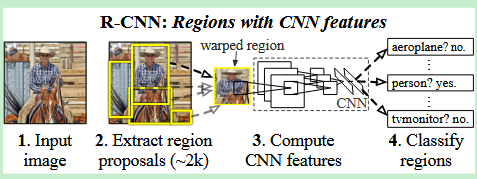
| 核心思想 (Core Idea) | “Regions with CNN features” (R-CNN):将目标检测任务分解为两个阶段:首先使用某种机制(如 Selective Search)生成与类别无关的候选区域 (Region Proposals),然后对每个区域独立地使用 CNN 提取特征并进行分类和位置修正。 |
| 核心假设 (Hypothesis) | 应用深度 CNN 从候选区域中提取的丰富、有层次的特征,将显著提升目标检测的准确率,远超传统方法。 |
📝 三句话总结
| 方面 | 内容 |
|---|---|
| ❓发现的老问题 |
|
| 💡提出的新方法 (R-CNN) |
|
| ⚡新方法的局限性 |
|
🔍 方法逻辑梳理
R-CNN 本身不是一个单一的端到端模型,而是一个处理流水线 (Pipeline)。
-
模型输入:
- 一张
RGB图像。
- 一张
-
处理流程:
- 候选区域生成 (Region Proposal - 外部模块):
- 输入: 原始图像。
- 处理: 运行
Selective Search算法。 - 输出: 约 2000 个候选区域的坐标 [ P 1 , P 2 , . . . , P 2 k ] [P_1, P_2, ..., P_{2k}] [P1,P2,...,P2k]。
- 特征提取 (CNN Feature Extractor):
- 输入: 图像和所有候选区域 P i P_i Pi。
- 处理 (Encoder 角色):
- 对每个 P i P_i Pi,从原图中裁剪出对应区域的图像块。
- 将图像块强制
变形 (warp)到 CNN 输入尺寸 (e.g., 227x227)。 - 将变形后的图像块送入微调后的
AlexNet进行前向传播。 - 提取特定层的激活值作为特征(如
pool5层特征 ϕ p o o l 5 ( P i ) \phi_{pool5}(P_i) ϕpool5(Pi) 或fc7层 4096 维向量 ϕ f c 7 ( P i ) \phi_{fc7}(P_i) ϕfc7(Pi) )。
- 输出: 每个候选区域 P i P_i Pi 对应的高维特征向量 ϕ ( P i ) \phi(P_i) ϕ(Pi)。
- 分类 (Classifier - SVMs):
- 输入: 特征向量 ϕ f c 7 ( P i ) \phi_{fc7}(P_i) ϕfc7(Pi)。
- 处理: 将特征向量输入到
N
+
1
N+1
N+1 个(N 个物体类别 +
1 个背景类别)独立训练好的线性SVM中。 - 输出: P i P_i Pi 属于每个类别的置信度得分。
- 定位精修 (Localizer - BBRs):
- 输入:
pool5特征向量 ϕ p o o l 5 ( P i ) \phi_{pool5}(P_i) ϕpool5(Pi)(对于被SVM判为非背景的 P i P_i Pi)。 - 处理: 根据
P
i
P_i
Pi 被判定的类别
c
c
c,使用该类别专属的
BBR线性模型,基于 ϕ p o o l 5 ( P i ) \phi_{pool5}(P_i) ϕpool5(Pi) 预测一个 ( d x , d y , d w , d h ) (d_x, d_y, d_w, d_h) (dx,dy,dw,dh) 变换。 - 输出: 经过变换修正后的更精确的边界框 G ^ i \hat{G}_i G^i。
- 输入:
- 后处理 (Post-processing - NMS):
- 输入: 所有带有类别、分数和(可能修正后)边界框的候选区域。
- 处理: 对每个类别,应用非极大值抑制 (
NMS) 算法,去除重叠度高且分数较低的冗余检测框。 - 输出: 最终的检测结果列表,每个结果包含类别、置信度和最终边界框。
- 候选区域生成 (Region Proposal - 外部模块):
-
模型输出:
- 图像中检测到的物体列表,每个物体包含:类别标签、置信度分数、精修后的边界框坐标。
-
训练过程 (Multi-stage):
- CNN 微调 (Fine-tuning):
- 使用
ImageNet预训练的AlexNet作为起点。 - 用目标检测数据集中的
warped region proposals进行微调。将与真实物体IoU> 0.5 的 proposal 视为对应类别的正样本,其余视为负样本(背景)。最后一层替换为 N+1 路 Softmax。
- 使用
- SVM 训练:
- 使用微调后的 CNN 提取所有 proposals 的
fc7特征并存盘。 - 对每个类别,训练一个二元线性
SVM。使用真实边界框作为正样本,与所有真实物体IoU< 0.3的 proposals 作为负样本。使用难例挖掘 (Hard Negative Mining)。
- 使用微调后的 CNN 提取所有 proposals 的
- BBR 训练:
- 对每个类别,筛选出与该类某个真实边界框
IoU较高的 proposals P P P。 - 提取这些
P
P
P 的
pool5特征 ϕ p o o l 5 ( P ) \phi_{pool5}(P) ϕpool5(P)。 - 训练线性回归模型,预测从 P P P 到其对应真实边界框 G G G 的变换参数 ( t x , t y , t w , t h ) (t_x, t_y, t_w, t_h) (tx,ty,tw,th)。
- 对每个类别,筛选出与该类某个真实边界框
- CNN 微调 (Fine-tuning):
🚀 关键创新点
-
创新点 1: CNN 特征用于检测 (CNN Features for Detection)
- 为什么要这样做? 传统手工特征表达能力有限,无法很好地应对物体的多样性。CNN 被证明能学习到更鲁棒、更具判别力的层次化特征。
- 不用它会怎样? 检测精度会停留在 DPM 等方法的水平,难以大幅提升,无法充分利用深度学习带来的红利。
-
创新点 2: 区域提议 + CNN 结合 (Region Proposals + CNN)
- 为什么要这样做? CNN 需要固定尺寸输入,而检测需要在图像各处定位物体。区域提议提供了物体可能位置的“候选”,将检测问题转化为对大量候选区域的“分类”问题,使得 CNN 可以被应用。
- 不用它会怎样? 如果直接在整图上用 CNN 滑窗,计算量巨大且难以处理不同尺寸和长宽比的物体;如果直接让 CNN 输出坐标,在当时的技术条件下难以实现精确且鲁棒的定位。这种结合是当时应用 CNN 进行检测的关键桥梁。
-
创新点 3: 迁移学习 (Transfer Learning: Pre-training + Fine-tuning)
- 为什么要这样做? 目标检测数据集通常比大型分类数据集(如
ImageNet)小得多。直接在小数据集上训练深度 CNN 容易过拟合。预训练让模型学习通用的视觉模式,微调则使其适应特定检测任务。 - 不用它会怎样? 在有限的检测数据上从头训练深度 CNN 效果会差很多,难以收敛到好的性能,无法有效利用
ImageNet等大规模数据集蕴含的知识。
- 为什么要这样做? 目标检测数据集通常比大型分类数据集(如
-
创新点 4: 边界框回归 (Bounding Box Regression)
- 为什么要这样做?
Selective Search等区域提议方法产生的候选框定位通常不够精确。 - 不用它会怎样? 检测框的定位精度会受限于区域提议的质量,即使分类正确,框的位置也可能不够准,导致在需要高
IoU匹配的应用或评估指标下性能下降。BBR进一步提升了定位精度。
- 为什么要这样做?
总而言之,R-CNN 通过巧妙地结合区域提议和强大的 CNN 特征,并利用迁移学习,成功地将深度学习引入目标检测领域,极大地提升了检测精度,开启了后续一系列基于深度学习的检测算法(Fast R-CNN, Faster R-CNN 等)的发展。
🔗 方法流程图
补充
边界框回归 (BBR)
1. BBR 的目标与核心思想
- 目标: 解决由
Selective Search等方法产生的候选区域框 P P P (Proposal) 定位不够精确的问题。【相当于有了先验候选区域P,进一步利用先验】 - 核心思想: 学习一个映射关系,根据从候选区域 P P P 提取的 CNN 特征,预测出将 P P P 调整到更接近真实边界框 G G G (Ground Truth) 所需的变换参数,从而得到一个更精确的预测框 G ^ \hat{G} G^
2. BBR 实现细节
输入 (Input)
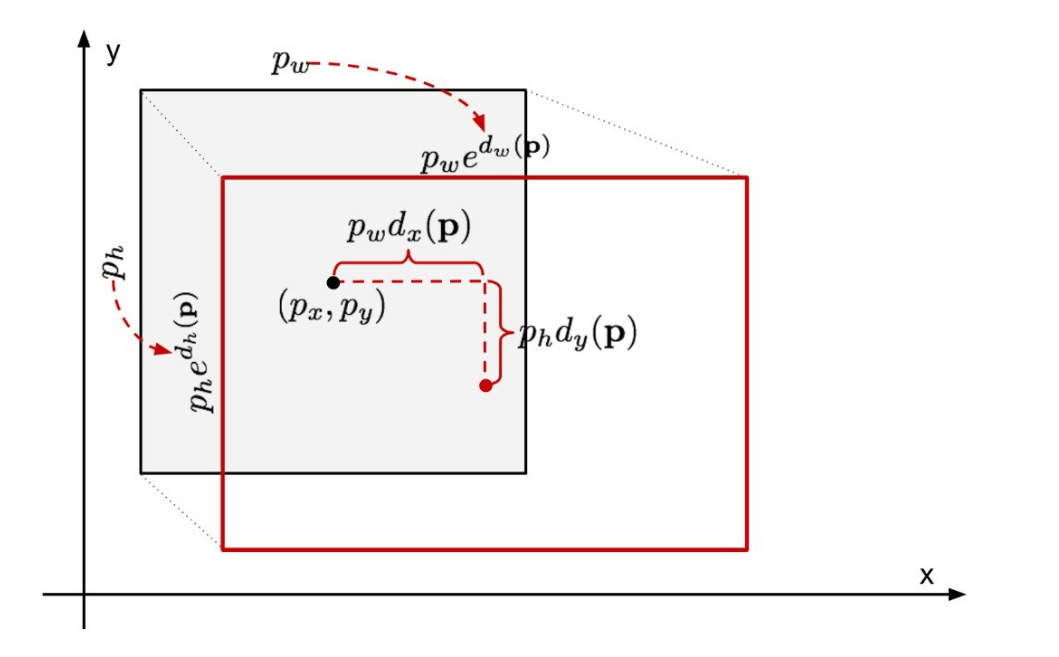
- 候选区域框 P = ( P x , P y , P w , P h ) P = (P_x, P_y, P_w, P_h) P=(Px,Py,Pw,Ph),其中 ( P x , P y ) (P_x, P_y) (Px,Py) 是中心坐标, P w , P h P_w, P_h Pw,Ph 是宽高。
- 从该区域提取的 CNN 特征向量,R-CNN 中特指
pool5层特征 ϕ 5 ( P ) \phi_5(P) ϕ5(P)。
目标变换 (Target Transformation)
BBR 不直接预测 G G G 的坐标,而是预测从 P P P 到 G G G 的相对变换量 t ∗ t_* t∗ ( ∗ * ∗ 代表 x , y , w , h x, y, w, h x,y,w,h):
- t x = ( G x − P x ) / P w t_x = (G_x - P_x) / P_w tx=(Gx−Px)/Pw (中心 x 平移量,宽度归一化)
- t y = ( G y − P y ) / P h t_y = (G_y - P_y) / P_h ty=(Gy−Py)/Ph (中心 y 平移量,高度归一化)
- t w = log ( G w / P w ) t_w = \log(G_w / P_w) tw=log(Gw/Pw) (宽度对数缩放)
- t h = log ( G h / P h ) t_h = \log(G_h / P_h) th=log(Gh/Ph) (高度对数缩放)
这些 t ∗ t_* t∗ 是模型训练时的真实标签。
模型 (Model)
- 对每个物体类别训练一组独立的线性回归模型。
- 模型以
pool5特征 ϕ 5 ( P ) \phi_5(P) ϕ5(P) 为输入,预测变换参数 d ∗ ( P ) d_*(P) d∗(P):
d ∗ ( P ) = w ∗ T ϕ 5 ( P ) d_*(P) = \mathbf{w}_*^T \phi_5(P) d∗(P)=w∗Tϕ5(P)
其中 w ∗ \mathbf{w}_* w∗ 是对应类别、对应变换维度 ( ∗ ) (*) (∗) 的学习到的权重向量。
训练 (Training)
- 数据选择: 只选用与某个真实框 G G G 重叠度高 (e.g., I o U ≥ 0.6 IoU \ge 0.6 IoU≥0.6) 的候选框 P P P 进行训练。
- 标签计算: 对每个训练样本 ( P i , G i ) (P^i, G^i) (Pi,Gi),计算真实的变换目标 t ∗ i t_*^i t∗i。
- 模型学习: 使用带
L
2
L_2
L2 正则化的最小二乘法 (岭回归) 寻找最优权重
w
∗
\mathbf{w}_*
w∗,最小化预测误差:
w ∗ = arg min w ^ ∗ ∑ i = 1 N ( t ∗ i − w ^ ∗ T ϕ 5 ( P i ) ) 2 + λ ∥ w ^ ∗ ∥ 2 \mathbf{w}_* = \arg\min_{\hat{\mathbf{w}}_*} \sum_{i=1}^N (t_*^i - \hat{\mathbf{w}}_*^T \phi_5(P^i))^2 + \lambda \|\hat{\mathbf{w}}_*\|^2 w∗=argw^∗mini=1∑N(t∗i−w^∗Tϕ5(Pi))2+λ∥w^∗∥2
推理/应用 (Inference/Application)
- 对于一个通过 SVM 分类器判定为某类别 c c c 的候选框 P P P,提取其 ϕ 5 ( P ) \phi_5(P) ϕ5(P) 特征。
- 使用该类别
c
c
c 对应的已训练好的权重
w
∗
c
\mathbf{w}_*^c
w∗c 预测变换参数
d
∗
(
P
)
d_*(P)
d∗(P):
d x ( P ) = ( w x c ) T ϕ 5 ( P ) d_x(P) = (\mathbf{w}_x^c)^T \phi_5(P) dx(P)=(wxc)Tϕ5(P), d y ( P ) = ( w y c ) T ϕ 5 ( P ) d_y(P) = (\mathbf{w}_y^c)^T \phi_5(P) dy(P)=(wyc)Tϕ5(P), … - 将预测的变换
d
∗
(
P
)
d_*(P)
d∗(P) 应用于原始框
P
P
P,得到修正后的预测框
G
^
=
(
G
^
x
,
G
^
y
,
G
^
w
,
G
^
h
)
\hat{G} = (\hat{G}_x, \hat{G}_y, \hat{G}_w, \hat{G}_h)
G^=(G^x,G^y,G^w,G^h):
- G ^ x = P w d x ( P ) + P x \hat{G}_x = P_w d_x(P) + P_x G^x=Pwdx(P)+Px
- G ^ y = P h d y ( P ) + P y \hat{G}_y = P_h d_y(P) + P_y G^y=Phdy(P)+Py
- G ^ w = P w exp ( d w ( P ) ) \hat{G}_w = P_w \exp(d_w(P)) G^w=Pwexp(dw(P))
- G ^ h = P h exp ( d h ( P ) ) \hat{G}_h = P_h \exp(d_h(P)) G^h=Phexp(dh(P))
3. 关键疑问解答
Q1: 为什么预测“变换” ( t ∗ t_* t∗) 而不是直接预测坐标 ( G x , G y , G w , G h G_x, G_y, G_w, G_h Gx,Gy,Gw,Gh)?
- 简化学习任务: 预测相对的、归一化的“微调量”比预测绝对坐标更容易学习,尤其是对于线性模型。模型只需关注如何根据特征修正当前的 P P P。
- 尺度不变性: 变换
t
∗
t_*
t∗ 的定义(归一化平移、对数缩放)使得
学习目标对物体的大小和位置不敏感,模型更鲁棒。例如,无论 P P P 大小如何,只要物体中心在 P P P 中心右侧 10% 宽度处, t x t_x tx 就大约是 0.1。 - 避免困难的绝对映射: 直接预测绝对坐标需要模型处理非常大的输出范围,对输入特征的微小变化可能导致输出剧烈变化,学习不稳定。预测变换将问题约束在一个更合理、更易于学习的空间。
- 利用 P 的信息: 预测变换显式地
利用了候选框 $P$ 作为“起点”或“参考点”。【先验】
再提一点,预测“变换” ($t_*$) 是根据损失函数来定义的:
w ∗ = arg min w ^ ∗ ∑ i = 1 N ( t ∗ i − w ^ ∗ T ϕ 5 ( P i ) ) 2 + λ ∥ w ^ ∗ ∥ 2 \mathbf{w}_* = \arg\min_{\hat{\mathbf{w}}_*} \sum_{i=1}^N (t_*^i - \hat{\mathbf{w}}_*^T \phi_5(P^i))^2 + \lambda \|\hat{\mathbf{w}}_*\|^2 w∗=argw^∗mini=1∑N(t∗i−w^∗Tϕ5(Pi))2+λ∥w^∗∥2
Q2: 边界框回归器权重 w ∗ \mathbf{w}_* w∗ 是什么以及如何工作?
- 来源: 权重向量 w ∗ \mathbf{w}_* w∗ 不是预设的,而是通过监督学习训练得到的。训练过程通过最小化预测变换 d ∗ d_* d∗ 与真实目标变换 t ∗ t_* t∗ 之间的误差(如上述岭回归损失函数),找到最优的 w ∗ \mathbf{w}_* w∗ 数值。
- 本质: w ∗ \mathbf{w}_* w∗ 是线性回归模型的核心参数。对于特定类别、特定变换维度(如“猫”类别的 x 变换),就有一组对应的权重 w x c a t \mathbf{w}_x^{cat} wxcat。
- 作用机制: 通过点积运算 (
d
∗
(
P
)
=
w
∗
T
ϕ
5
(
P
)
d_*(P) = \mathbf{w}_*^T \phi_5(P)
d∗(P)=w∗Tϕ5(P)) 实现。这个运算本质上是一个加权求和:
d ∗ ( P ) = ∑ j = 1 K w j f j d_*(P) = \sum_{j=1}^K w_j f_j d∗(P)=j=1∑Kwjfj
其中 f j f_j fj 是 ϕ 5 ( P ) \phi_5(P) ϕ5(P) 特征向量的第 j j j 维, w j w_j wj 是 w ∗ \mathbf{w}_* w∗ 向量的第 j j j 个权重。 - 意义: 每个权重 w j w_j wj 代表了第 j j j 个 CNN 特征 f j f_j fj 对于预测该特定变换 d ∗ d_* d∗ 的重要性和影响方向。训练好的 w ∗ \mathbf{w}_* w∗ 编码了从数据中学到的知识:即哪些视觉特征模式(体现在 ϕ 5 ( P ) \phi_5(P) ϕ5(P) 中)指示了需要对边界框进行何种几何调整。它将高维的特征向量“翻译”成一个代表调整量的标量值。
Q3: 为什么还要单独训练一个SVM用作分类器呢?直接把CNN网络微调最后一层分类成21类(1类背景)作为分类器不更直接么
-
实证性能提升: R-CNN 论文的实验结果表明,在提取了 CNN 特征(特别是 fc7 特征)之后,使用 线性 SVM 进行分类,其 mAP (mean Average Precision) 结果显著优于直接使用微调后的 CNN 的 Softmax 输出。
-
训练策略和样本定义的差异:
-
CNN微调通常相对宽松。例如,与真实边界框 IoU 大于 0.5 的候选区域就被视为对应类别的正样本,用于微调 Softmax。负样本(背景)的选择也相对简单。
-
SVM 训练,只有真实边界框本身被视为对应类别的正样本。对于负样本,作者采用了
难例挖掘 (Hard Negative Mining) 策略
一些常见技术:
难例挖掘 (Hard Negative Mining):
先用一部分负样本训练 SVM,然后将训练好的 SVM 应用到大量的、与任何真实物体 IoU 都很低的候选区域(这些都是“简单”或“潜在困难”的背景样本)上。找出那些被 SVM 错误地分为前景(即“难例” Hard Negatives)的背景样本,将这些难例加入负样本集中,重新训练 SVM。 这个过程使得 SVM 特别擅长区分那些容易与真实物体混淆的背景区域,从而提高了分类的准确性。而 CNN 微调阶段的 Softmax 通常没有经过这样专门针对难例的优化。
非极大值抑制 Non-Maximum Suppression:
对于一组指向同一物体的、相互重叠的边界框,只保留那个置信度分数最高的框,并抑制(删除)掉其他与它重叠度过高的框。