写在前面
在RNN - 循环神经网络(概念介绍)中,介绍了一下 RNN 的相关概念,下面就基于概念对 RNN 进行两种实现。从零开始实现和简洁实现。
从 0 开始实现
首先导入必要的环境,使用 H.G.Wells 的时光机器数据集上训练。先读取数据集。
%matplotlib inline
import math
import torch
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2l
# 批量大小,每次看多长的序列
batch_size, num_steps = 32, 35
train_iter, vocab = d2l.load_data_time_machine(
batch_size, num_steps)
[独热编码]
每个词元都表示为一个数字索引,将这些索引直接输入神经网络可能会使学习变得困难。我们通常将每个词元表示为更具表现力的特征向量。最简单的表示称为独热编码(one-hot encoding)。
简言之,将每个索引映射为相互不同的单位向量:假设词表中不同词元的数目为
N
N
N(即len(vocab)),词元索引的范围为
0
0
0到
N
−
1
N-1
N−1。如果词元的索引是整数
i
i
i,那么我们将创建一个长度为
N
N
N的全
0
0
0向量,并将第
i
i
i处的元素设置为
1
1
1。此向量是原始词元的一个独热向量。索引为
0
0
0和
2
2
2的独热向量如下所示:
我们每次采样的(小批量数据形状是二维张量:(批量大小,时间步数)。)one_hot函数将这样一个小批量数据转换成三维张量,张量的最后一个维度等于词表大小(len(vocab))。我们经常转换输入的维度,以便获得形状为(时间步数,批量大小,词表大小)的输出。这将使我们能够更方便地通过最外层的维度,一步一步地更新小批量数据的隐状态。

初始化模型参数
接下来,我们[初始化循环神经网络模型的模型参数]。隐藏单元数num_hiddens是一个可调的超参数。当训练语言模型时,输入和输出来自相同的词表。因此,它们具有相同的维度,即词表的大小。
def get_params(vocab_size, num_hiddens, device):
num_inputs = num_outputs = vocab_size # 输入本来是一个个词,通过 one-hot 变成了一个个长为 vocab_size 的向量
def normal(shape):
return torch.randn(size=shape, device=device) * 0.01
# 隐藏层参数
W_xh = normal((num_inputs, num_hiddens)) # 输入映射到隐藏变量的矩阵
W_hh = normal((num_hiddens, num_hiddens)) # 上一个隐藏变量变到下一个隐藏变量 ,移除这个就变成了一个单隐藏层的 MLP
b_h = torch.zeros(num_hiddens, device=device)
# 输出层参数
W_hq = normal((num_hiddens, num_outputs))
b_q = torch.zeros(num_outputs, device=device)
# 附加梯度
params = [W_xh, W_hh, b_h, W_hq, b_q] # 放到一个 list 里面
for param in params:
param.requires_grad_(True)
return params
循环神经网络模型
为了定义循环神经网络模型,我们首先需要[一个init_rnn_state函数在初始化时返回隐状态]。这个函数的返回是一个张量,张量全用0填充,形状为(批量大小,隐藏单元数)。在后面的章节中我们将会遇到隐状态包含多个变量的情况,而使用元组可以更容易地处理些。
def init_rnn_state(batch_size, num_hiddens, device):
# 将隐藏状态作为一个tuple,这里只有一个,但是后面的LSTM 有两个,保持形式上的一致
return (torch.zeros((batch_size, num_hiddens), device=device), )
[下面的rnn函数定义了如何在一个时间步内计算隐状态和输出。]循环神经网络模型通过inputs最外层的维度实现循环,以便逐时间步更新小批量数据的隐状态H。此外,这里使用
tanh
\tanh
tanh函数作为激活函数。因为当元素在实数上满足均匀分布时,
tanh
\tanh
tanh函数的平均值为0。
def rnn(inputs, state, params):
# inputs的形状:(时间步数量,批量大小,词表大小)
W_xh, W_hh, b_h, W_hq, b_q = params
H, = state
outputs = []
# X的形状:(批量大小,词表大小),inputs的形状:(时间步数量,批量大小,词表大小)
for X in inputs: # 前面将时间维度进行了转置,这里便于操作
H = torch.tanh(torch.mm(X, W_xh) + torch.mm(H, W_hh) + b_h)
Y = torch.mm(H, W_hq) + b_q
outputs.append(Y) # 所有的输出全部放到一个 list 里面
return torch.cat(outputs, dim=0), (H,) # 输出加上当前的隐藏状态,便于后续继续传播
# 拼出来是一个二维矩阵,列数还是vocab_size,但是行数变成了批量大小*时间长度
定义了所有需要的函数之后,接下来我们[创建一个类来包装这些函数],并存储从零开始实现的循环神经网络模型的参数。
class RNNModelScratch: #@save
"""从零开始实现的循环神经网络模型"""
def __init__(self, vocab_size, num_hiddens, device,
get_params, init_state, forward_fn):
self.vocab_size, self.num_hiddens = vocab_size, num_hiddens
self.params = get_params(vocab_size, num_hiddens, device)
self.init_state, self.forward_fn = init_state, forward_fn
def __call__(self, X, state):
X = F.one_hot(X.T, self.vocab_size).type(
torch.float32) # 转置,然后变成one_hot,大小为vocab_size,然后变成浮点数
return self.forward_fn(X, state, self.params)
def begin_state(self, batch_size, device):
return self.init_state(
batch_size, self.num_hiddens, device)
[检查输出是否具有正确的形状]。例如,隐状态的维数是否保持不变。
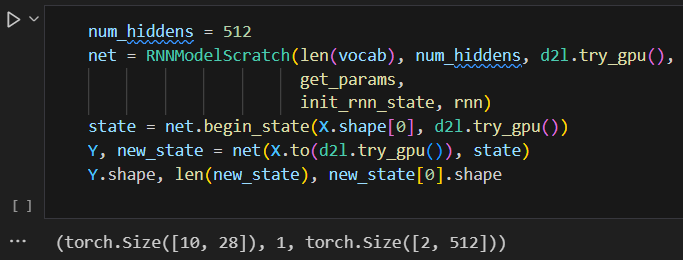
可以看到输出形状是(时间步数
×
\times
×批量大小,词表大小),而隐状态形状保持不变,即(批量大小,隐藏单元数)。
预测
[首先定义预测函数来生成prefix之后的新字符],其中的prefix是一个用户提供的包含多个字符的字符串。在循环遍历prefix中的开始字符时,我们不断地将隐状态传递到下一个时间步,但是不生成任何输出。这被称为预热(warm-up)期,因为在此期间模型会自我更新(例如,更新隐状态),但不会进行预测。预热期结束后,隐状态的值通常比刚开始的初始值更适合预测,从而预测字符并输出它们。
def predict_ch8(prefix, num_preds, net, vocab, device): #@save
"""在prefix后面生成新字符"""
state = net.begin_state(batch_size=1, device=device) # 生成初始的隐藏状态
outputs = [vocab[prefix[0]]] # 存的是每个字符串在vocab里面的下标
get_input = lambda: torch.tensor([outputs[-1]], device=device).reshape((1, 1))
for y in prefix[1:]: # 预热期
_, state = net(get_input(), state) # 不关心输出
outputs.append(vocab[y]) # 因为我有真实值,因此没必要使用预测值
for _ in range(num_preds): # 预测num_preds步
y, state = net(get_input(), state)
outputs.append(int(y.argmax(dim=1).reshape(1)))
return ''.join([vocab.idx_to_token[i] for i in outputs])
现在我们可以测试predict_ch8函数。我们将前缀指定为time traveller ,并基于这个前缀生成10个后续字符。鉴于我们还没有训练网络,它会生成荒谬的预测结果。
predict_ch8('time traveller ', 10, net, vocab, d2l.try_gpu()) # 向后预测十个字符,这里还没有训练,因此结果不是很好
[梯度裁剪]
对于长度为 T T T的序列,我们在迭代中计算这 T T T个时间步上的梯度,将会在反向传播过程中产生长度为 O ( T ) \mathcal{O}(T) O(T)的矩阵乘法链。当 T T T较大时,它可能导致数值不稳定,例如可能导致梯度爆炸或梯度消失。因此,循环神经网络模型往往需要额外的方式来支持稳定训练。
一般来说,当解决优化问题时,我们对模型参数采用更新步骤。假定在向量形式的
x
\mathbf{x}
x中,或者在小批量数据的负梯度
g
\mathbf{g}
g方向上。例如,使用
η
>
0
\eta > 0
η>0作为学习率时,在一次迭代中,我们将
x
\mathbf{x}
x更新为
x
−
η
g
\mathbf{x} - \eta \mathbf{g}
x−ηg。
如果我们进一步假设目标函数
f
f
f表现良好,即函数
f
f
f在常数
L
L
L下是利普希茨连续的(Lipschitz continuous)。也就是说,对于任意
x
\mathbf{x}
x和
y
\mathbf{y}
y我们有:
∣
f
(
x
)
−
f
(
y
)
∣
≤
L
∥
x
−
y
∥
.
|f(\mathbf{x}) - f(\mathbf{y})| \leq L \|\mathbf{x} - \mathbf{y}\|.
∣f(x)−f(y)∣≤L∥x−y∥.在这种情况下,我们可以安全地假设:如果我们通过
η
g
\eta \mathbf{g}
ηg更新参数向量,则
∣
f
(
x
)
−
f
(
x
−
η
g
)
∣
≤
L
η
∥
g
∥
,
|f(\mathbf{x}) - f(\mathbf{x} - \eta\mathbf{g})| \leq L \eta\|\mathbf{g}\|,
∣f(x)−f(x−ηg)∣≤Lη∥g∥,这意味着我们不会观察到超过
L
η
∥
g
∥
L \eta \|\mathbf{g}\|
Lη∥g∥的变化。这既是坏事也是好事。坏的方面,它限制了取得进展的速度;好的方面,它限制了事情变糟的程度,尤其当我们朝着错误的方向前进时。
有时梯度可能很大,从而优化算法可能无法收敛。我们可以通过降低
η
\eta
η的学习率来解决这个问题。但是如果我们很少得到大的梯度呢?在这种情况下,这种做法似乎毫无道理。一个流行的替代方案是通过将梯度
g
\mathbf{g}
g投影回给定半径(例如
θ
\theta
θ)的球来裁剪梯度
g
\mathbf{g}
g。如下式:
g
←
min
(
1
,
θ
∥
g
∥
)
g
.
\mathbf{g} \leftarrow \min\left(1, \frac{\theta}{\|\mathbf{g}\|}\right) \mathbf{g}.
g←min(1,∥g∥θ)g.通过这样做,我们知道梯度范数永远不会超过
θ
\theta
θ,并且更新后的梯度完全与
g
\mathbf{g}
g的原始方向对齐。它还有一个值得拥有的副作用,即限制任何给定的小批量数据(以及其中任何给定的样本)对参数向量的影响,这赋予了模型一定程度的稳定性。梯度裁剪提供了一个快速修复梯度爆炸的方法,虽然它并不能完全解决问题,但它是众多有效的技术之一。
下面我们定义一个函数来裁剪模型的梯度,模型是从零开始实现的模型或由高级API构建的模型。我们在此计算了所有模型参数的梯度的范数。
def grad_clipping(net, theta): # @save
"""裁剪梯度"""
if isinstance(net, nn.Module): # 简洁实现调用这个
params = [p for p in net.parameters() if p.requires_grad]
else:
params = net.params # 自己实现调用这个
norm = torch.sqrt(sum(torch.sum(
(p.grad ** 2)) for p in params)) # 计算所有参数的梯度平方和的平方根
# 要是norm大于阈值,就进行裁剪
if norm > theta:
for param in params:
param.grad[:] *= theta / norm
训练
在训练模型之前,定义一个函数在一个迭代周期内训练模型。
- 序列数据的不同采样方法(随机采样和顺序分区)将导致隐状态初始化的差异。
- 我们在更新模型参数之前裁剪梯度。 这样的操作的目的是,即使训练过程中某个点上发生了梯度爆炸,也能保证模型不会发散。
- 我们用困惑度来评价模型。这样的度量确保了不同长度的序列具有可比性。
具体来说,当使用顺序分区时,我们只在每个迭代周期的开始位置初始化隐状态。由于下一个小批量数据中的第 i i i个子序列样本与当前第 i i i个子序列样本相邻,因此当前小批量数据最后一个样本的隐状态,将用于初始化下一个小批量数据第一个样本的隐状态。这样,存储在隐状态中的序列的历史信息可以在一个迭代周期内流经相邻的子序列。然而,在任何一点隐状态的计算,都依赖于同一迭代周期中前面所有的小批量数据,这使得梯度计算变得复杂。为了降低计算量,在处理任何一个小批量数据之前,我们先分离梯度,使得隐状态的梯度计算总是限制在一个小批量数据的时间步内。
当使用随机抽样时,因为每个样本都是在一个随机位置抽样的,因此需要为每个迭代周期重新初始化隐状态。updater是更新模型参数的常用函数。它既可以是从头开始实现的d2l.sgd函数,也可以是深度学习框架中内置的优化函数。
# @save
def train_epoch_ch8(net, train_iter, loss, updater, device,
use_random_iter):
"""训练网络一个迭代周期(定义见第8章)"""
state, timer = None, d2l.Timer()
metric = d2l.Accumulator(2) # 训练损失之和,词元数量
for X, Y in train_iter:
if state is None or use_random_iter:
# 在第一次迭代或使用随机抽样时初始化state
state = net.begin_state(batch_size=X.shape[0], device=device)
else:
if isinstance(net, nn.Module) and not isinstance(state, tuple):
# state对于nn.GRU是个张量
state.detach_()
else:
# state对于nn.LSTM或对于我们从零开始实现的模型是个张量
for s in state:
s.detach_()
y = Y.T.reshape(-1) # 时间序列放到前面去
X, y = X.to(device), y.to(device)
y_hat, state = net(X, state)
l = loss(y_hat, y.long()).mean()
if isinstance(updater, torch.optim.Optimizer):
updater.zero_grad()
l.backward()
grad_clipping(net, 1)
updater.step()
else:
l.backward()
grad_clipping(net, 1)
# 因为已经调用了mean函数
updater(batch_size=1)
metric.add(l * y.numel(), y.numel())
return math.exp(metric[0] / metric[1]), metric[1] / timer.stop()
循环神经网络模型的训练函数既支持从零开始实现,也可以使用高级API来实现。
#@save
def train_ch8(net, train_iter, vocab, lr, num_epochs, device,
use_random_iter=False):
"""训练模型(定义见第8章)"""
loss = nn.CrossEntropyLoss()
animator = d2l.Animator(xlabel='epoch', ylabel='perplexity',
legend=['train'], xlim=[10, num_epochs])
# 初始化
if isinstance(net, nn.Module):
updater = torch.optim.SGD(net.parameters(), lr)
else:
updater = lambda batch_size: d2l.sgd(net.params, lr, batch_size)
predict = lambda prefix: predict_ch8(prefix, 50, net, vocab, device)
# 训练和预测
for epoch in range(num_epochs):
ppl, speed = train_epoch_ch8(
net, train_iter, loss, updater, device, use_random_iter)
if (epoch + 1) % 10 == 0:
print(predict('time traveller'))
animator.add(epoch + 1, [ppl])
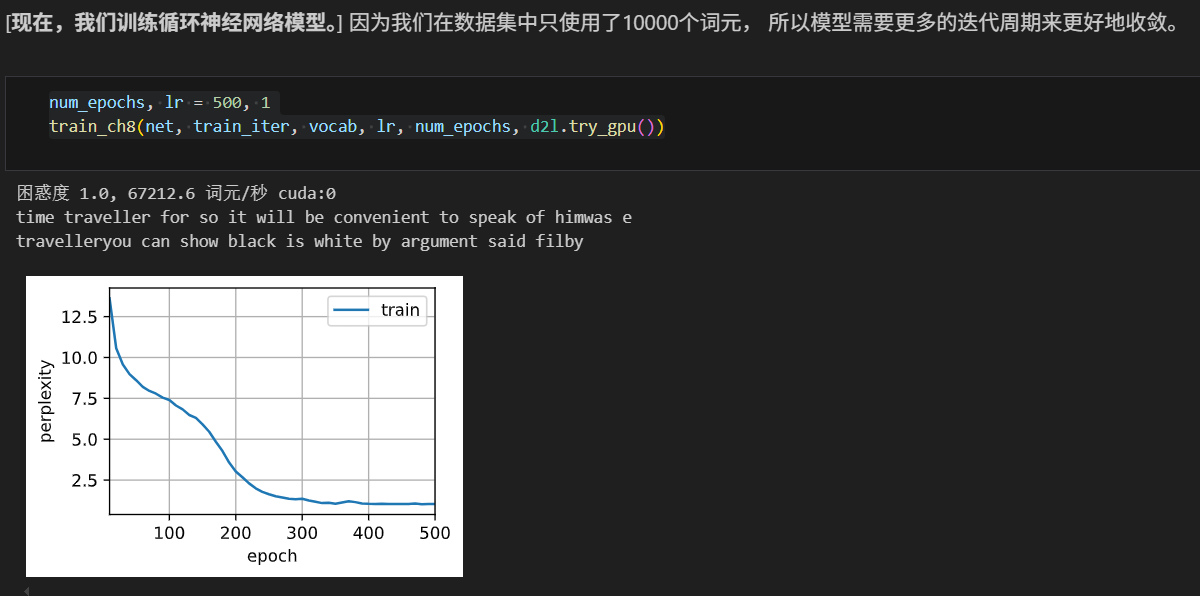
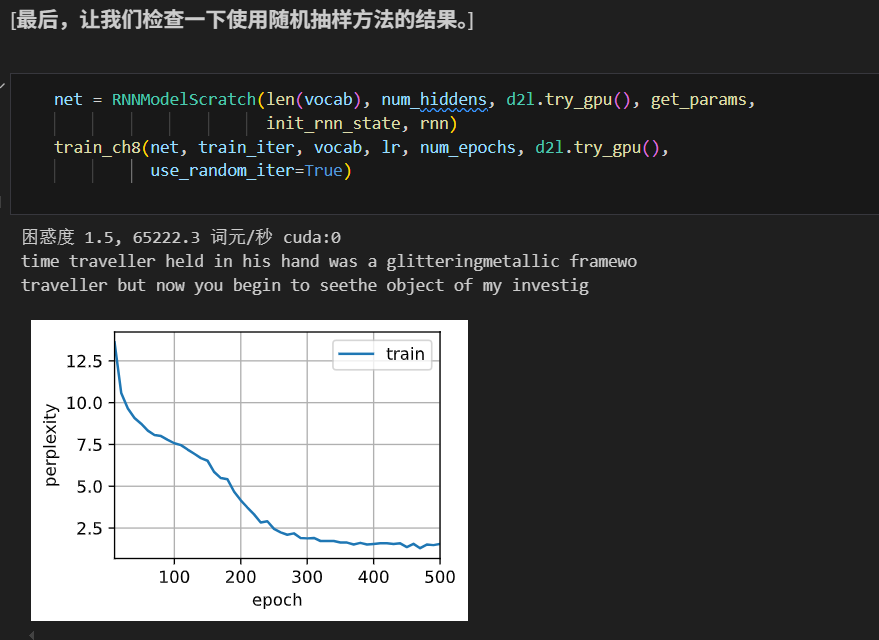
print(f'困惑度 {ppl:.1f}, {speed:.1f} 词元/秒 {str(device)}')
print(predict('time traveller'))
print(predict('traveller'))
从零开始实现上述循环神经网络模型,虽然有指导意义,但是并不方便。下面将学习如何改进循环神经网络模型。例如,如何使其实现地更容易,且运行速度更快。
小结
- 我们可以训练一个基于循环神经网络的字符级语言模型,根据用户提供的文本的前缀生成后续文本。
- 一个简单的循环神经网络语言模型包括输入编码、循环神经网络模型和输出生成。
- 循环神经网络模型在训练以前需要初始化状态,不过随机抽样和顺序划分使用初始化方法不同。
- 当使用顺序划分时,我们需要分离梯度以减少计算量。
- 在进行任何预测之前,模型通过预热期进行自我更新(例如,获得比初始值更好的隐状态)。
- 梯度裁剪可以防止梯度爆炸,但不能应对梯度消失。
简洁实现
还是一样,导入必要的环境:
import torch
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2l
batch_size, num_steps = 32, 35
train_iter, vocab = d2l.load_data_time_machine(batch_size, num_steps)
[定义模型]
高级API提供了循环神经网络的实现。我们构造一个具有256个隐藏单元的单隐藏层的循环神经网络层rnn_layer。仅需要将多层理解为一层循环神经网络的输出被用作下一层循环神经网络的输入。
num_hiddens = 256
rnn_layer = nn.RNN(len(vocab), num_hiddens) # 从 0 实现的那一堆直接融合成了这一句代码
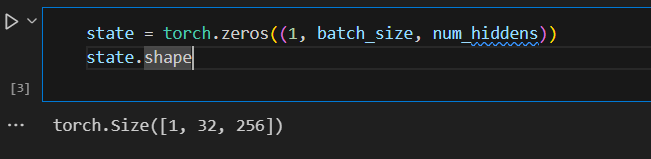
我们(使用张量来初始化隐状态),它的形状是(隐藏层数,批量大小,隐藏单元数)。
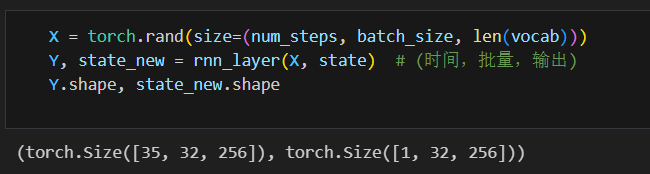
**通过一个隐状态和一个输入,我们就可以用更新后的隐状态计算输出。**需要强调的是,rnn_layer的“输出”(Y)不涉及输出层的计算:它是指每个时间步的隐状态,这些隐状态可以用作后续输出层的输入。
为一个完整的循环神经网络模型定义了一个RNNModel类。注意,rnn_layer只包含隐藏的循环层,我们还需要创建一个单独的输出层。
#@save
class RNNModel(nn.Module):
"""循环神经网络模型"""
def __init__(self, rnn_layer, vocab_size, **kwargs):
super(RNNModel, self).__init__(**kwargs)
self.rnn = rnn_layer
self.vocab_size = vocab_size
self.num_hiddens = self.rnn.hidden_size
# 如果RNN是双向的(之后将介绍),num_directions应该是2,否则应该是1
if not self.rnn.bidirectional:
self.num_directions = 1
self.linear = nn.Linear(self.num_hiddens, self.vocab_size) # PyTorch RNN layer 只包括隐藏层,不包括输出层,需要自己构造
else:
self.num_directions = 2
self.linear = nn.Linear(self.num_hiddens * 2, self.vocab_size)
def forward(self, inputs, state):
X = F.one_hot(inputs.T.long(), self.vocab_size)
X = X.to(torch.float32)
Y, state = self.rnn(X, state)
# 全连接层首先将Y的形状改为(时间步数*批量大小,隐藏单元数)
# 它的输出形状是(时间步数*批量大小,词表大小)。
output = self.linear(Y.reshape((-1, Y.shape[-1])))
return output, state
def begin_state(self, device, batch_size=1):
if not isinstance(self.rnn, nn.LSTM):
# nn.GRU以张量作为隐状态
return torch.zeros((self.num_directions * self.rnn.num_layers,
batch_size, self.num_hiddens),
device=device)
else:
# nn.LSTM以元组作为隐状态
return (torch.zeros((
self.num_directions * self.rnn.num_layers,
batch_size, self.num_hiddens), device=device),
torch.zeros((
self.num_directions * self.rnn.num_layers,
batch_size, self.num_hiddens), device=device))
训练与预测
在训练模型之前,基于一个具有随机权重的模型进行预测。
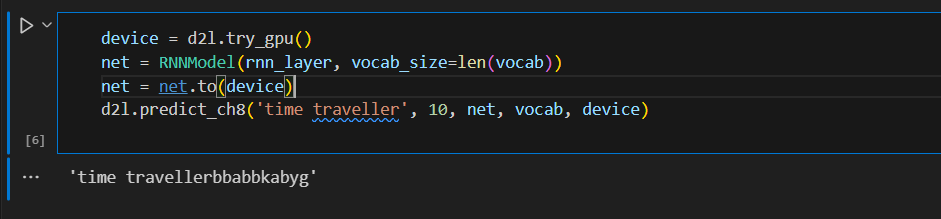
很明显,这种模型根本不能输出好的结果。接下来,我们调用train_ch8,并且使用高级API训练模型
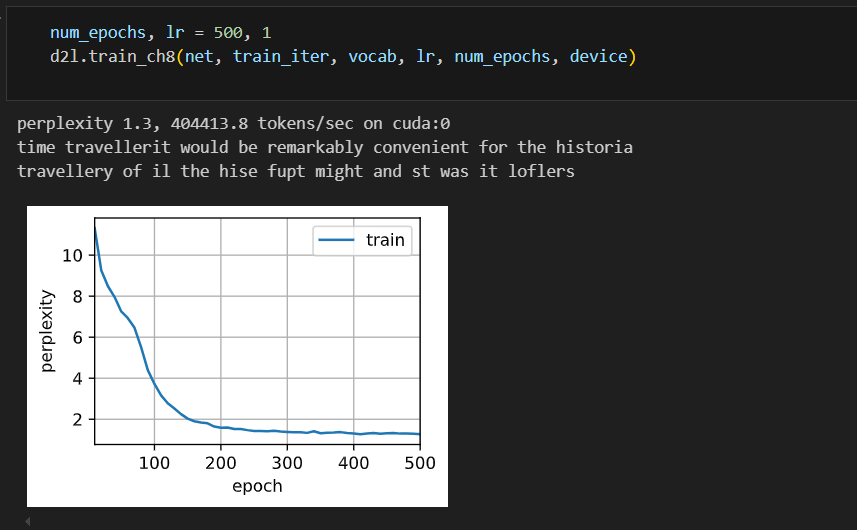
与我们自己实现相比,由于深度学习框架的高级API对代码进行了更多的优化,该模型在较短的时间内达到了较低的困惑度。
小结
- 深度学习框架的高级API提供了循环神经网络层的实现。
- 高级API的循环神经网络层返回一个输出和一个更新后的隐状态,我们还需要计算整个模型的输出层。
- 相比从零开始实现的循环神经网络,使用高级API实现可以加速训练。
QA 思考
Q1:num_step 是干嘛的?
A1:就是
t
t
t 这个时间维度样本的一个句子的长度。
比如说我这里有一个句子(你好,世界!),我给模型一个‘你’,模型需要预测出‘好’,给个‘好’需要预测出下一个‘,’,这里的 num_step = 6,也就是输入到小批量里面句子的长度(包括标点符号),可以认为是六个样本的分类问题。需要做六次分类。
Q2:RNN里normal()函数的作用是?
A2:对 w 做初始化权重的
Q3:为啥是批量大小乘以时间长度?
A3:每一个批量里面每一个样本的长度是
t
t
t ,也就是时间长度,实际上是需要做
t
t
t 次分类。从一个多分类的角度讲,给定一个小批量,做的分类次数是批量大小 × 时间长度,对任何一个样本在任何一个时间点都需要做一次分类,也就等价于批量大小 × 时间长度。
Q4:H是一个batch更新一次吗?看刚刚的代码H像是每个batch会覆盖一次但是H难道不应该是每个step都在变化吗?
A4:H 这个隐藏状态,每个 step 就是每个时间维度就会更新一次,若一个 batch 里面样本长度为
t
t
t 的话,在这个 batch 里面 H 就会被更新
t
t
t 次。根据采样的不一样,当前 batch 的 H 需不需要丢给下一个 batch ?还是说直接砍断了。根据下一个样本的 batch 和前一个样本的 batch 是不是接在一起来判断。
具体来说:
- 如果你的数据集是连续的,或者你希望模型能够捕捉到跨批次的时间依赖性,那么可以考虑将当前批次的最后一个时间步的隐藏状态 H 传递给下一个批次的第一个时间步作为其初始隐藏状态。
- 如果每个批次之间没有直接的时间连续性(例如,从不同的文档或独立事件中采样得到的数据),则通常不需要也不应该将隐藏状态从一个批次传递到下一个批次,因为这可能会引入不必要的混淆和错误关联。
Q5:batch_size 和 time 的区别是啥?
A5:time 是句子的长度,是每一次一个样本的句子有多长。batch_size 表示我一次小批量同时训练多少个样本。
Q6:批量随不随机取,应该要看批量之间有没有时间关联吧,要是有关联,那就不能随机取吧?
Q6:实际上,还是需要随机取的,因为这样可以保证模型的泛化能力,不会 Overfitting ,同时RNN 一次性记不住很长的序列(超过 100 的长度就很悬了)。
Q7:为什么是预测字符而不是预测一个单词呢
A7:这里的样本太小,计算太大,用字符会好一点,简单起见。
后记
代码整理如下(从零开始实现):
import math
import torch
from torch import nn
from torch.nn import functional as F
# 假设 load_data_time_machine 函数用于加载时间机器数据集
# 该函数返回一个数据迭代器和词汇表
from language_models_and_dataset import load_data_time_machine
# 假设这些工具类和函数用于计时、累加、动画展示和随机梯度下降
from study.package import Timer, Accumulator, Animator, sgd
# 设置批量大小和时间步长
batch_size, num_steps = 32, 35
# 加载数据迭代器和词汇表
train_iter, vocab = load_data_time_machine(
batch_size, num_steps
)
# 创建一个示例输入张量
X = torch.arange(10).reshape((2, 5))
# 对输入张量进行 one-hot 编码,并打印编码后的形状
# 这里 28 是词表大小,假设词表大小为 28
print(F.one_hot(X.T, 28).shape)
# 初始化 RNN 模型的参数
def get_params(vocab_size, num_hiddens, device):
# 输入和输出的维度都等于词表大小
num_inputs = num_outputs = vocab_size
# 定义一个函数用于初始化参数,使用正态分布随机初始化
def normal(shape):
return torch.randn(size=shape, device=device) * 0.01
# 输入到隐藏层的权重矩阵
W_xh = normal((num_inputs, num_hiddens))
# 隐藏层到隐藏层的权重矩阵
W_hh = normal((num_hiddens, num_hiddens))
# 隐藏层的偏置向量
b_h = torch.zeros(num_hiddens, device=device)
# 隐藏层到输出层的权重矩阵
W_hq = normal((num_hiddens, num_outputs))
# 输出层的偏置向量
b_q = torch.zeros(num_outputs, device=device)
# 将所有参数存储在一个列表中
params = [W_xh, W_hh, b_h, W_hq, b_q]
# 为每个参数开启梯度计算
for param in params:
param.requires_grad_(True)
return params
# 初始化 RNN 的隐藏状态
def init_rnn_state(batch_size, num_hiddens, device):
# 隐藏状态初始化为全零张量
return (torch.zeros((batch_size, num_hiddens), device=device),)
# 定义 RNN 的前向传播过程
def rnn(inputs, state, params):
# inputs 的形状:(时间步数量,批量大小,词表大小)
W_xh, W_hh, b_h, W_hq, b_q = params
# 提取当前的隐藏状态
H, = state
# 用于存储每个时间步的输出
outputs = []
# X 的形状:(批量大小,词表大小),inputs 的形状:(时间步数量,批量大小,词表大小)
for X in inputs: # 前面将时间维度进行了转置,这里便于操作
# 更新隐藏状态
H = torch.tanh(torch.mm(X, W_xh) + torch.mm(H, W_hh) + b_h)
# 计算当前时间步的输出
Y = torch.mm(H, W_hq) + b_q
# 将当前时间步的输出添加到列表中
outputs.append(Y) # 所有的输出全部放到一个 list 里面
# 将所有时间步的输出拼接起来
return torch.cat(outputs, dim=0), (H,) # 输出加上当前的隐藏状态,便于后续继续传播
# 拼出来是一个二维矩阵,列数还是 vocab_size,但是行数变成了批量大小*时间长度
# 定义一个从零开始实现的 RNN 模型类
class RNNModelScratch:
def __init__(self, vocab_size, num_hiddens, device,
get_params, init_state, forward_fn):
# 保存词表大小和隐藏层维度
self.vocab_size, self.num_hiddens = vocab_size, num_hiddens
# 初始化模型参数
self.params = get_params(vocab_size, num_hiddens, device)
# 保存初始化隐藏状态的函数和前向传播函数
self.init_state, self.forward_fn = init_state, forward_fn
def __call__(self, X, state):
# 对输入进行 one-hot 编码并转换为浮点类型
X = F.one_hot(X.T, self.vocab_size).type(
torch.float32)
# 调用前向传播函数
return self.forward_fn(X, state, self.params)
def begin_state(self, batch_size, device):
# 调用初始化隐藏状态的函数
return self.init_state(
batch_size, self.num_hiddens, device)
# 尝试使用 GPU,如果可用则返回 GPU 设备,否则返回 CPU 设备
def try_gpu(i=0):
if torch.cuda.device_count() >= i + 1:
return torch.device(f'cuda:{i}')
return torch.device('cpu')
# 设置隐藏层维度
num_hiddens = 512
# 创建一个从零开始实现的 RNN 模型实例
net = RNNModelScratch(len(vocab), num_hiddens, try_gpu(),
get_params,
init_rnn_state, rnn)
# 初始化隐藏状态
state = net.begin_state(X.shape[0], try_gpu())
# 进行一次前向传播
Y, new_state = net(X.to(try_gpu()), state) # 调用
# 打印输出的形状、隐藏状态的数量和隐藏状态的形状
print(Y.shape, len(new_state), new_state[0].shape)
# 预测函数,根据给定的前缀预测后续的字符
def predict_ch8(prefix, num_preds, net, vocab, device):
# 初始化隐藏状态
state = net.begin_state(batch_size=1, device=device)
# 将前缀的第一个字符转换为对应的词表索引并添加到输出列表中
outputs = [vocab[prefix[0]]]
# 定义一个函数用于获取输入
get_input = lambda: torch.tensor([outputs[-1]], device=device).reshape((1, 1))
# 对于前缀中的每个字符,进行前向传播更新隐藏状态
for y in prefix[1:]:
_, state = net(get_input(), state)
outputs.append(vocab[y])
# 预测后续的字符
for _ in range(num_preds):
y, state = net(get_input(), state)
outputs.append(int(y.argmax(dim=1).reshape(1)))
# 将输出的词表索引转换为字符并拼接成字符串
return ''.join([vocab.idx_to_token[i] for i in outputs])
# 进行一次预测,向后预测十个字符,这里还没有训练,因此结果不是很好
predict_ch8('time traveller ', 10, net, vocab, try_gpu())
# 梯度裁剪函数,用于防止梯度爆炸
def grad_clipping(net, theta): # @save
"""裁剪梯度"""
if isinstance(net, nn.Module): # 简洁实现调用这个
# 获取所有需要梯度计算的参数
params = [p for p in net.parameters() if p.requires_grad]
else:
# 自己实现调用这个
params = net.params
# 计算所有参数的梯度平方和的平方根
norm = torch.sqrt(sum(torch.sum(
(p.grad ** 2)) for p in params))
# 要是 norm 大于阈值,就进行裁剪
if norm > theta:
for param in params:
param.grad[:] *= theta / norm
# 训练网络一个迭代周期的函数
def train_epoch_ch8(net, train_iter, loss, updater, device,
use_random_iter):
"""训练网络一个迭代周期(定义见第8章)"""
# 初始化隐藏状态和计时器
state, timer = None, Timer()
# 用于累加训练损失和词元数量
metric = Accumulator(2) # 训练损失之和,词元数量
for X, Y in train_iter:
if state is None or use_random_iter:
# 在第一次迭代或使用随机抽样时初始化 state
state = net.begin_state(batch_size=X.shape[0], device=device)
else:
if isinstance(net, nn.Module) and not isinstance(state, tuple):
# state 对于 nn.GRU 是个张量
state.detach_()
else:
# state 对于 nn.LSTM 或对于我们从零开始实现的模型是个张量
for s in state:
s.detach_()
# 将标签进行形状调整
y = Y.T.reshape(-1) # 时间序列放到前面去
# 将输入和标签移动到指定设备
X, y = X.to(device), y.to(device)
# 进行前向传播
y_hat, state = net(X, state)
# 计算损失
l = loss(y_hat, y.long()).mean()
if isinstance(updater, torch.optim.Optimizer):
# 如果使用 PyTorch 内置的优化器,先清零梯度
updater.zero_grad()
# 反向传播计算梯度
l.backward()
# 进行梯度裁剪
grad_clipping(net, 1)
# 更新参数
updater.step()
else:
# 手动实现的优化器
l.backward()
grad_clipping(net, 1)
# 因为已经调用了 mean 函数
updater(batch_size=1)
# 累加损失和词元数量
metric.add(l * y.numel(), y.numel())
# 计算困惑度和训练速度
return math.exp(metric[0] / metric[1]), metric[1] / timer.stop()
# 训练模型的函数
def train_ch8(net, train_iter, vocab, lr, num_epochs, device,
use_random_iter=False):
"""训练模型(定义见第8章)"""
# 定义损失函数为交叉熵损失
loss = nn.CrossEntropyLoss()
# 创建一个动画对象用于可视化训练过程
animator = Animator(xlabel='epoch', ylabel='perplexity',
legend=['train'], xlim=[10, num_epochs])
# 初始化优化器
if isinstance(net, nn.Module):
updater = torch.optim.SGD(net.parameters(), lr)
else:
updater = lambda batch_size: sgd(net.params, lr, batch_size)
# 定义预测函数
predict = lambda prefix: predict_ch8(prefix, 50, net, vocab, device)
# 训练和预测
for epoch in range(num_epochs):
# 训练一个迭代周期,返回困惑度和训练速度
ppl, speed = train_epoch_ch8(
net, train_iter, loss, updater, device, use_random_iter)
if (epoch + 1) % 10 == 0:
# 每 10 个 epoch 打印一次预测结果并更新动画
print(predict('time traveller'))
animator.add(epoch + 1, [ppl])
# 打印最终的困惑度、训练速度和设备信息
print(f'困惑度 {ppl:.1f}, {speed:.1f} 词元/秒 {str(device)}')
# 打印预测结果
print(predict('time traveller'))
print(predict('traveller'))
# 设置训练的轮数和学习率
num_epochs, lr = 500, 1
# 训练模型
train_ch8(net, train_iter, vocab, lr, num_epochs, try_gpu())
# 重新初始化模型
net = RNNModelScratch(len(vocab), num_hiddens, try_gpu(), get_params,
init_rnn_state, rnn)
# 使用随机抽样的方式再次训练模型
train_ch8(net, train_iter, vocab, lr, num_epochs, try_gpu(),
use_random_iter=True)