一、ROS 系统安装版本选择
每版的Ubuntu系统版本都有与之对应ROS版本,每一版ROS都有其对应版本的Ubuntu版本,切记不可随便装。ROS 和Ubuntu之间的版本对应关系如下:( 可以从这个网站查看ROS2的各个发行版本的介绍信息。)

这里Ubuntu 20.04 支持的ROS2版本为Foxy
二、安装ROS
参考文章
如何一行代码安装ROS|2022最新版|一行代码安装ROS2|一行代码解决rosdep|一行代码配置多ROS环境![]() https://blog.csdn.net/qq_27865227/article/details/120191557?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522166141462416782391868234%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257D&request_id=166141462416782391868234&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~first_rank_ecpm_v1~rank_v31_ecpm-1-120191557-null-null.nonecase&utm_term=%E5%A6%82%E4%BD%95%E4%B8%80%E8%A1%8C%E4%BB%A3%E7%A0%81&spm=1018.2226.3001.4450一键运行,输入1,跟着提示走(选择ros2,选择Foxy),就装完了。
https://blog.csdn.net/qq_27865227/article/details/120191557?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522166141462416782391868234%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257D&request_id=166141462416782391868234&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~first_rank_ecpm_v1~rank_v31_ecpm-1-120191557-null-null.nonecase&utm_term=%E5%A6%82%E4%BD%95%E4%B8%80%E8%A1%8C%E4%BB%A3%E7%A0%81&spm=1018.2226.3001.4450一键运行,输入1,跟着提示走(选择ros2,选择Foxy),就装完了。
wget http://fishros.com/install -O fishros && bash fishros
三、ROS2 示例测试
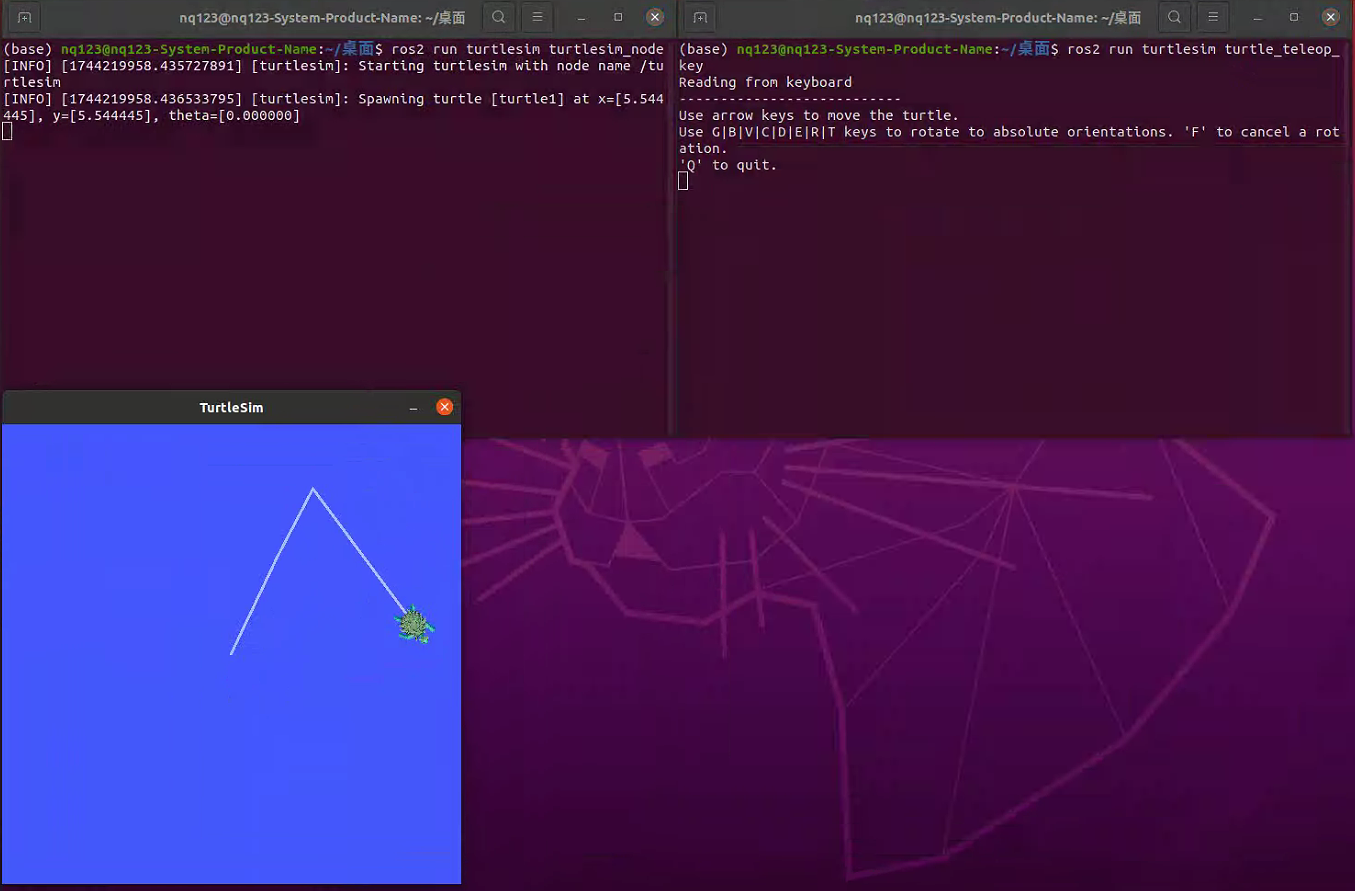
ROS中的经典示例——小海龟仿真器。ROS安装好后,关闭当前安装ROS的终端,重新启动两个新终端,分别运行指令来测试
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key第一句指令将启动一个蓝色背景的海龟仿真器,第二句指令将启动一个键盘控制节点,在该终端中点击键盘上的“上下左右”按键,就可以控制小海龟运动了。
四、参考链接
ubuntu22.04安装ROS2 详细教程-CSDN博客![]() https://blog.csdn.net/shenliu128/article/details/127296318?spm=1001.2101.3001.6650.1&utm_medium=distribute.pc_relevant.none-task-blog-2~default~CTRLIST~Rate-1-127296318-blog-128027984.235%5Ev38%5Epc_relevant_anti_t3&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2~default~CTRLIST~Rate-1-127296318-blog-128027984.235%5Ev38%5Epc_relevant_anti_t3&utm_relevant_index=2ubuntu22.04使用[小鱼]一键安装ros-humble_小鱼一键安装ros-CSDN博客
https://blog.csdn.net/shenliu128/article/details/127296318?spm=1001.2101.3001.6650.1&utm_medium=distribute.pc_relevant.none-task-blog-2~default~CTRLIST~Rate-1-127296318-blog-128027984.235%5Ev38%5Epc_relevant_anti_t3&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2~default~CTRLIST~Rate-1-127296318-blog-128027984.235%5Ev38%5Epc_relevant_anti_t3&utm_relevant_index=2ubuntu22.04使用[小鱼]一键安装ros-humble_小鱼一键安装ros-CSDN博客![]() https://blog.csdn.net/m0_52113469/article/details/142001911
https://blog.csdn.net/m0_52113469/article/details/142001911