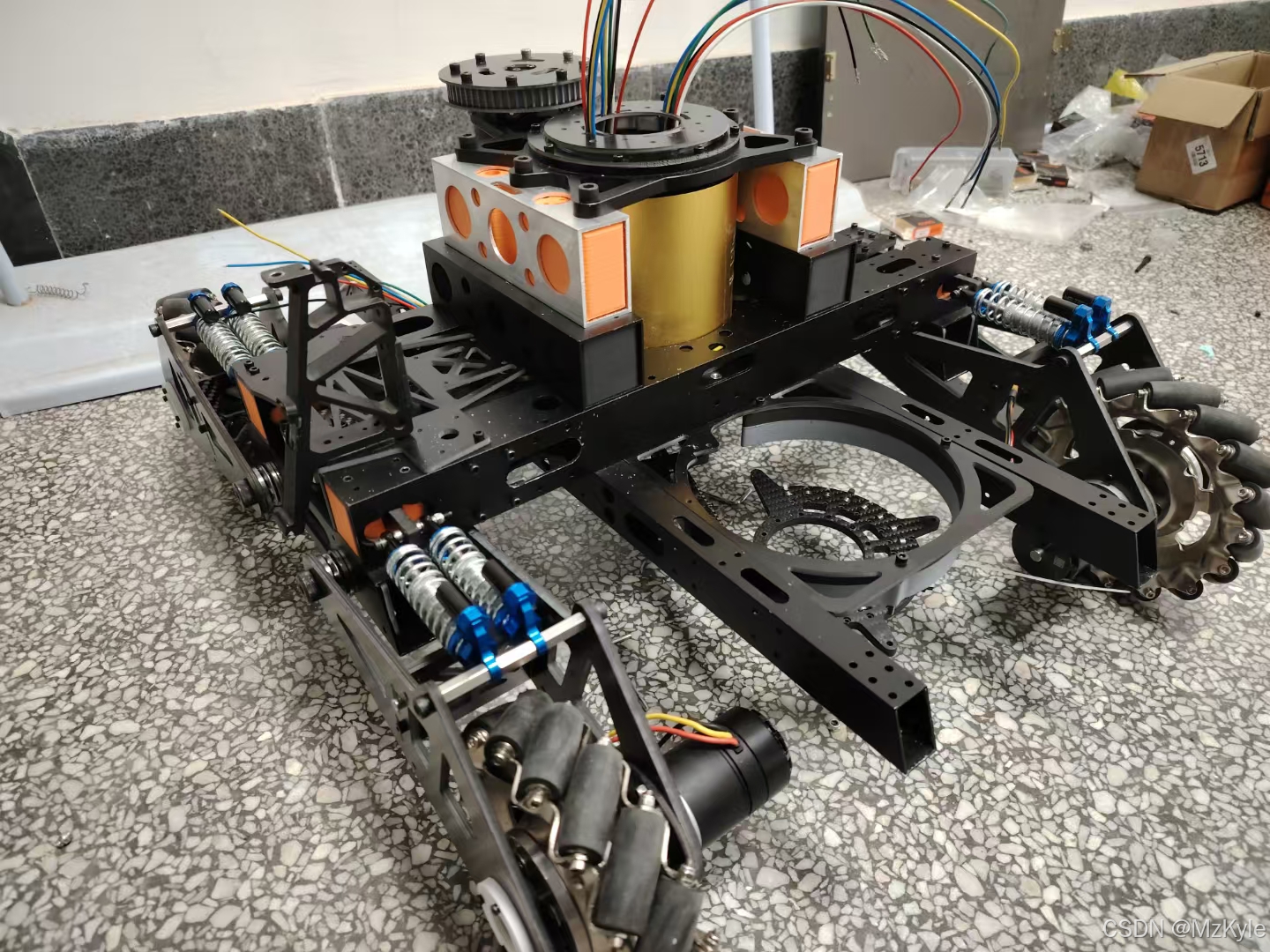
一、基本定义与起源
- 定义:麦克纳姆轮是一种实现全向移动的特殊轮式结构,通过在主轮周边安装多个倾斜的辊子(小轮),使设备能够在平面上向任意方向移动(包括横向、斜向、旋转等),无需转向机构。这种独特的设计打破了传统轮式移动的方向限制,为各类移动设备赋予了极高的机动性。
- 起源:由瑞典工程师 Bengt Ilon 于 1973 年发明,隶属于麦克纳姆公司(Mecanum AB),因此得名。它的诞生为机器人技术、自动化物流等领域带来了革命性的变化,开启了全向移动的新篇章。
二、结构与核心组件
- 主轮主体
- 圆形轮毂,通常由金属(如铝合金,具有强度高、质量轻的特点,适用于对负载有一定要求的场景)或高强度塑料(成本较低,加工方便,常用于小型或轻载设备)制成,连接驱动轴,由电机直接或间接驱动旋转。轮毂的尺寸设计需综合考虑设备的整体尺寸、承重以及所需的运动速度等因素,一般较大的轮毂在通过障碍物时更具优势,但会增加转动惯量。
- 辊子(小轮)
- 数量:均匀分布在主轮周边,常见为 8 - 12 个。数量的选择会影响轮子与地面的接触特性,较多的辊子能提供更平稳的支撑,但也会增加结构复杂度和摩擦力。
- 形状:
- 圆柱形辊子:通用型,接触面积均匀,适合平坦地面,在一般的室内环境如工厂车间、仓库等应用广泛,能保证稳定的摩擦力传递,实现精确的运动控制。
- 圆锥形辊子:减少横向滑动摩擦,适合高速或高精度控制,但加工难度较高。圆锥形状使得辊子在横向受力时能更好地适应,常用于对运动精度和速度要求苛刻的场景,如精密仪器搬运、高速自动化生产线。
- 关键参数:
- 倾斜角度:
- 辊子轴线与主轮轴线的夹角,常见为 45°(最通用),能在横向和纵向运动能力上达到较好的平衡,适用于大多数场景。
- 30°:在一些对纵向驱动力要求稍高,同时兼顾横向移动的场合使用,例如搬运较重物品且需要偶尔调整横向位置的工业机器人。
- 60°:侧重于横向移动能力,适用于空间局促、需要频繁侧向调整的场景,如在狭窄货架间穿梭的仓储机器人。
- 安装方式:对称排列,确保受力平衡,避免轮子在运转过程中出现偏心、晃动等问题,影响运动精度和设备稳定性。
- 倾斜角度:
- 驱动系统
- 每个麦克纳姆轮由独立电机驱动,这是实现其复杂运动的关键。通过精确控制各轮转速和转向,合成所需运动方向。电机类型多样,常见的有直流无刷电机(效率高、寿命长、控制精度高,广泛应用于中高端设备)、步进电机(定位精度极高,适合低速、高精度的运动控制场景,如科研实验平台),选择依据主要包括设备的动力需求、控制精度要求以及成本预算。

- 每个麦克纳姆轮由独立电机驱动,这是实现其复杂运动的关键。通过精确控制各轮转速和转向,合成所需运动方向。电机类型多样,常见的有直流无刷电机(效率高、寿命长、控制精度高,广泛应用于中高端设备)、步进电机(定位精度极高,适合低速、高精度的运动控制场景,如科研实验平台),选择依据主要包括设备的动力需求、控制精度要求以及成本预算。
三、工作原理:全向移动的实现
- 摩擦力分解
- 当主轮旋转时,辊子与地面接触点的运动方向可分解为:
- 主轮切线方向(沿主轮旋转方向的力,推动设备前进/后退):这是实现设备前后移动的主要动力来源,类似于传统车轮的驱动方式。
- 辊子轴线方向(辊子自由转动,允许横向滑动):由于辊子可绕自身轴线自由转动,此方向的摩擦力不会阻碍设备的横向移动,反而为侧向运动提供了可能。
- 倾斜的辊子使接触点的摩擦力同时产生纵向(主轮方向)和横向(辊子轴线方向)的分力,这两个分力相互配合,为实现全向移动奠定了基础。
- 当主轮旋转时,辊子与地面接触点的运动方向可分解为:
- 运动合成
- 通过控制 4 个轮子的转速和转向(顺时针/逆时针),可合成任意方向的合力:
- 若 4 轮转速相同、转向一致,设备直线前进/后退,此时各轮子的纵向分力共同作用,推动设备沿直线运动。
- 若两侧轮转速相反,设备原地旋转,依靠轮子横向分力的差异产生旋转力矩,实现原地转向,在狭小空间调整姿态极为便捷。
- 若各轮转速和转向不同,可实现横向平移、斜向移动等复杂运动。例如,通过精确控制对角线上两个轮子的转速差,可实现斜向移动,满足多样化的作业需求。
- 通过控制 4 个轮子的转速和转向(顺时针/逆时针),可合成任意方向的合力:
四、分类与特点
| 分类方式 | 类型 | 特点 |
|---|---|---|
| 辊子倾斜角度 | 45°麦克纳姆轮 | 最常用,平衡横向与纵向运动能力,适用于大多数场景,无论是工业搬运还是服务机器人的室内导航,都能表现出色。 |
| 90°辊子(类全向轮) | 横向移动能力极强,但纵向驱动效率低,接近传统全向轮(Omni Wheel),在对横向快速移动需求高、纵向移动距离短的场景,如快速分拣流水线旁的物料横向转运环节有优势。 | |
| 辊子形状 | 圆柱形辊子 | 通用型,接触面积均匀,适合平坦地面,维护简单,成本较低,是多数常规应用的首选。 |
| 圆锥形辊子 | 减少横向滑动摩擦,适合高速或高精度控制,但加工难度较高,常用于高端精密设备,如芯片制造车间的搬运机器人。 | |
| 驱动方式 | 单电机驱动 | 结构简单,成本低,但控制精度依赖算法,适用于对成本敏感、运动精度要求不特别高的小型设备,如简易教育机器人套件。 |
| 双电机驱动(独立辊子) | 可单独控制辊子转速,实现更复杂运动,但结构复杂、成本高,在高端工业机器人、特种作业机器人领域,能满足复杂任务的精准操控需求。 |
五、核心优势与局限性
- 优势:
- 全向移动能力:无需转向,可在狭小空间灵活移动,定位精度高。在复杂的工业布局中,能快速绕过障碍物,精准停靠在指定工位,极大提高生产效率。
- 运动平滑性:辊子连续接触地面,震动小,适合精密设备。对于光学仪器加工、电子芯片制造等对震动敏感的工艺环节,可有效避免因震动引起的产品缺陷。
- 控制灵活性:通过电机转速调节,可实现无级变速和任意角度移动,满足多样化的任务需求,无论是直线加速、减速,还是复杂的曲线轨迹移动,都能精准控制。
- 局限性:
- 结构复杂:辊子和轴承数量多,制造和维护成本高。一旦某个辊子或轴承出现故障,排查和修复难度较大,需要专业技术人员和工具。
- 地面适应性差:不适合粗糙、凹凸或松软地面(辊子易卡滞或陷住)。在户外建筑工地、未硬化的土路等环境,运动性能会大打折扣,甚至无法正常工作。
- 负载限制:横向承载能力低于纵向,重载时易磨损辊子。当搬运重物且需要频繁侧向移动时,辊子的磨损加剧,缩短使用寿命,增加维护成本。
- 运动学解算复杂:需通过矩阵运算合成速度,对控制算法要求较高。开发人员需要具备深厚的数学和控制理论知识,增加了控制系统的设计难度和开发周期。
六、典型应用场景
- 工业领域
- AGV 搬运机器人:在工厂流水线中精准搬运物料,适应狭窄通道。例如汽车制造车间,能在生产线旁穿梭,将零部件按时送达装配工位,提高生产节拍。
- 协作机器人:与人类共融作业,灵活调整位置(如手术机器人辅助定位)。在手术室内,可根据医生指令精确移动,辅助手术器械精准定位,降低手术风险。
- 服务与消费领域
- 仓储机器人:高效分拣货物,提升仓库空间利用率。在大型电商仓库,快速穿梭于货架间,准确抓取货物,实现快速出入库。
- 商用清洁机器人:在复杂环境中完成清扫,避免碰撞。能在商场、酒店大堂等人员密集、布局复杂的场所,灵活避开障碍物,完成地面清洁任务。
- 特种场景
- 医疗设备:如移动手术平台,精准靠近病床。在紧急救援现场或医院病房,可平稳快速移动至患者床边,为手术争取时间。
- 军事侦察机器人:在有限空间内快速调整姿态,适应复杂地形(需改良型辊子)。通过特殊设计的辊子,在山地、丛林等复杂野外环境,利用全向移动优势隐蔽侦察。
- 科研与教育
- 机器人竞赛(如 RoboCup):利用全向移动优势实现快速攻防。参赛队伍借助麦克纳姆轮的灵活操控,设计复杂战术,在赛场上快速移动、转向,抢夺球权。
- 高校实验平台:作为全向运动控制的典型案例,帮助学生深入理解运动学、动力学原理,培养机器人开发技能。

七、与其他全向轮的对比
| 类型 | 麦克纳姆轮 | 全向轮(Omni Wheel) | 差速轮(普通轮) |
|---|---|---|---|
| 辊子角度 | 倾斜(45°为主) | 垂直(90°,横向自由转动) | 无辊子,仅主轮 |
| 移动能力 | 全向(任意方向合成) | 横向自由 + 纵向驱动 | 仅前进/后退 + 转向(需差速) |
| 结构复杂度 | 高(多倾斜辊子) | 中(横向辊子) | 低(简单轮子) |
| 地面适应性 | 中等(依赖平坦度) | 中等(横向辊子易卡异物) | 高(仅主轮接触) |
| 典型应用 | 精密定位、复杂轨迹 | 轻载搬运、快速横向移动 | 常规移动(如普通小车) |
八、控制原理与运动学模型
- 速度合成公式
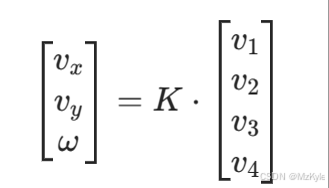
设 4 个轮子的转速为 v 1 v_1 v1, v 2 v_2 v2, v 3 v_3 v3, v 4 v_4 v4,通过倾斜角度(θ = 45°)的运动学矩阵,可计算机器人的整体速度:
其中
v
x
v_x
vx,
v
y
v_y
vy为平移速度, 为旋转角ω速度,K为转换矩阵(需根据轮间距和角度设计)。在实际应用中,不同的设备尺寸、轮子布局会导致转换矩阵 K 的具体形式有所差异,需要根据实际情况精确推导。
2. 控制算法
- 常用 逆运动学 解算各轮转速,结合 PID 控制实现速度闭环。PID 控制通过比例、积分、微分环节,实时调整电机输出,使实际速度快速跟踪目标速度,保证运动的稳定性和精度。
- 高级应用需考虑动力学模型(如摩擦补偿、负载分配)。在高速、重载或高精度运动场景,考虑轮子与地面的摩擦力变化、各轮子的负载不均等因素,对控制算法进行优化,提高系统的鲁棒性。
九、设计与使用注意事项
- 机械设计
- 辊子轴承需选择低摩擦、高耐用性类型(如滚珠轴承),减少能量损耗,延长使用寿命,同时要考虑轴承的密封性能,防止灰尘、碎屑等异物进入,影响转动。
- 主轮与辊子的直径比需合理(通常主轮直径为辊子的 3 - 5 倍),避免打滑。过大或过小的直径比都会影响轮子的抓地力和运动性能,需要通过实验和模拟进行优化。
- 地面要求
- 优先使用平坦硬质地面(如瓷砖、木地板),避免地毯、沙地或高落差地形。若无法避免在较差地面运行,可考虑对地面进行预处理(如铺设临时导轨)或对轮子进行适应性改进(如增加防滑花纹、提高辊子离地间隙)。
- 负载匹配
- 横向负载不超过额定值的 50%,防止辊子变形或轴承损坏。在设计搬运任务时,要根据麦克纳姆轮的负载特性合理分配物品重量,避免出现偏载现象。
- 维护要点
- 定期清理辊子间的异物(如毛发、碎屑),检查轴承润滑情况。可制定详细的维护计划,定期拆解轮子进行深度保养,及时更换磨损的辊子和轴承,确保设备长期稳定运行。
十、总结
麦克纳姆轮通过巧妙的辊子倾斜设计,将传统轮子的单向驱动转化为全向运动,成为精密移动设备的核心部件。尽管存在结构复杂和地面适应性的限制,但其在工业自动化、服务机器人等领域的优势不可替代。随着材料和控制算法的进步,麦克纳姆轮的应用场景将不断扩展,推动机器人移动技术向更灵活、精准的方向发展。未来,有望在更多新兴领域,如深海探测、太空探索等极端环境下的移动装备中看到它的身影,为人类的科技探索之旅助力。