近年来,轻型仿生机器人因其卓越的运动灵活性与环境适应性受到国际机器人领域的广泛关注。然而,现有气动驱动器普遍受限于低模量粘弹性材料的回弹滞后效应与能量耗散特性,加之其"非刚即柔"的二元结构设计范式,难以同时满足高功率密度与快速动态响应的驱动需求,制约了机器人的整体运动性能。因此,如何从材料特性和结构形式两方面革新驱动单元的设计原理与制备工艺,突破现有粘弹性材料驱动方式的功率密度和响应频率瓶颈,成为高性能仿生机器设计所亟待攻克的关键挑战。图1 论文截图近日,上海交通大学陈根良教授、王皓教授团队联合西湖大学姜汉卿教授、复旦大学张壮青年研究员设计了一种“面向机器人多模式运动的去电子化刚弹耦合高频振荡驱动单元”,为高性能气动机器人开发提供了一种全新设计思路。该设计将双稳态屈曲梁、抗拉伸折展腔和低阻抗管路阀进行有机融合,利用弹性铰接梁的跳跃屈曲现象和柔性摆动阀的回转对称效应,实现了基于机械负反馈的高频率自振荡运动。借助弹性复材的高爆发力和柔软织物的低迟滞特性,突破了现有去电子化纯机械驱动单元的响应频率慢、功率密度低和支撑刚度差等局限。所开发的自振荡驱动单元具有轻质高负载、快速高响应和高效低耗损特性,在稳定气源输入下能够实现50Hz以上往复输出,较现有同类型方案提高一个量级。上述高频自振荡驱动单元应用于多种移动机器人,大幅提升了轻型仿生机器人的运动性能。研究工作以“A non-electrical pneumatic hybrid oscillator for high-frequency multimodal robotic locomotion”为题发表于Nature Communications期刊。上海交通大学陈根良教授、博士生龙泳舟为本文共同第一作者。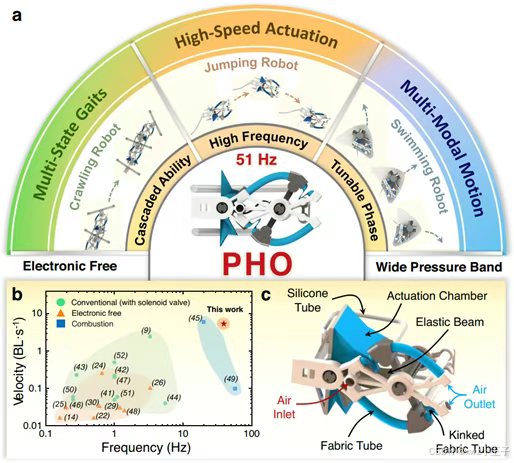
图2. 面向机器人多模式驱动的去电子化高频气动振荡驱动器(PHO)去电子化气动振荡驱动单元通常利用弹性结构的机械不稳定性,将恒定压力气动输入转化为周期性运动输出,以驱动机器人执行特定任务。然而,现有设计形式普遍依赖环路振荡结构,不仅振荡频率低,同时振荡模式也较为单一,极大限制了此类去电子化机械元器件的应用。针对上述问题,本研究引入刚弹软材料/结构相耦合的思想,将折展驱动腔体、屈曲双稳态梁和柔性换向阀有机融合,通过特殊的流道设计构建了机械负反馈机制,实现了在无需下拉电阻前提下的单驱动器独立振荡。该设计利用铰接双稳态梁失稳跳变过程中主被动轴的相位差构建流道切换窗口,大幅提升了频响带宽,实现了高达51Hz的最高振荡频率。该性能不仅大幅领先现有无电子化气动振荡驱动器,同时相比传统电磁阀也具有显著优势。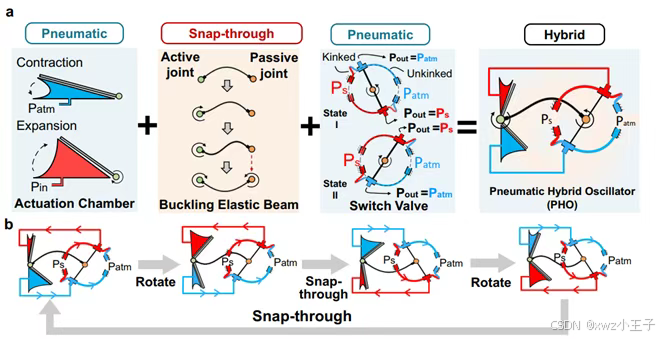
图3. 振荡器设计与驱动原理流体振荡单元的响应过程涉及多种力学机理的耦合作用,为了简化系统的频率特性预测模型,本研究基于电路等效的思想,根据驱动腔、弹性梁和换向阀三个单元各自的物理特性,将其等效为相应的电子元件,从而建立系统的频率预测模型。其中,弹性板作为能量转换与切换阀推动的单元,其特征可以等效为电容。类似地,气动腔体也承担能量转换的作用,也可以等效为电容。两者的运动特征时间则由电阻表征。通过建立给定的不同参数下的弹性板变形与受力关系曲线,可以解析地表征电容值。利用等效的模拟电路可以计算系统的振荡频率,完成不同设计参数下振荡频率的预测,从而实现对PHO的优化设计以达到最高振荡频率。
图4. 基于等效模拟电路的驱动器振荡频率预测模型基于所提出的高频振荡驱动器,开发了一款模仿袋鼠运动的双足跳跃机器人。该机器人包含一对双足和一根柔性尾部,利用摩擦力各向异性实现持续的前向运动。实验表明,机器人的运动性能与驱动频率、起跳角度、跳跃步长和滞空时长占比有关,通过优化机器人的双腿安装角度和驱动频率,最终实现了高达5.1倍体长每秒的机器人最大运动速度,该速度不仅远超现有去电子化气动机器人,同时也领先于使用电磁阀门的气动机器人。该实验表明所提出的轻量化振荡驱动单元具有良好的输出性能。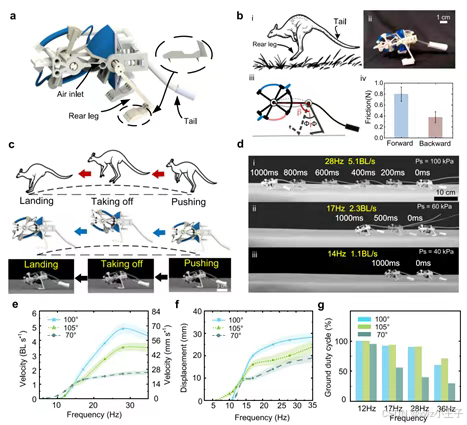
图5. 双足高频自振荡气动跳跃机器人针对常规振荡器依赖环路振荡的设计局限,本研究所提出的振荡单元提供了可任意驱动单元数量级联的能力。通过将多个振荡器的流道进行组合编辑,便可实现丰富的级联响应模式,从而用于具有多个逻辑驱动单元的机器人系统中。基于该设计,本研究提出了一种多足爬行机器人,该机器人由两个级联的振荡器构成,在恒定的输入气源下,两个驱动单元在给定周期内交替响应,从而实现稳定、快速的前向运动。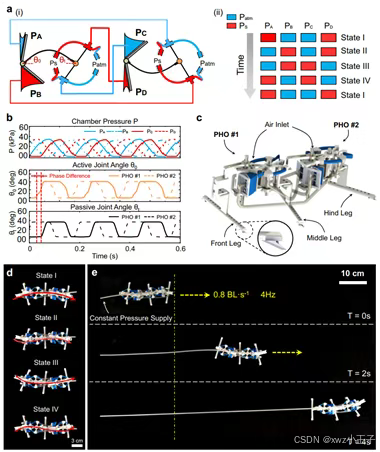
图6. 基于多振荡器级联级的爬行机器人为了实现在设计了振荡器的频率后依然保持输出可调的功能,本研究在振荡主弹性板的基础上引入了辅助弹性板。通过多板并联的形式,利用辅助弹性板的变形对主弹性板的屈曲过程进行调控,从而实现屈曲振荡的相位调整。基于此原理,使用CO2气瓶为气源,设计了一款无绳系的水下游动机器人,在恒定的气源供给下,通过调整辅助梁的初始角度,可实现丰富的机器人航迹选择,极大拓宽了PHO的实际应用场景。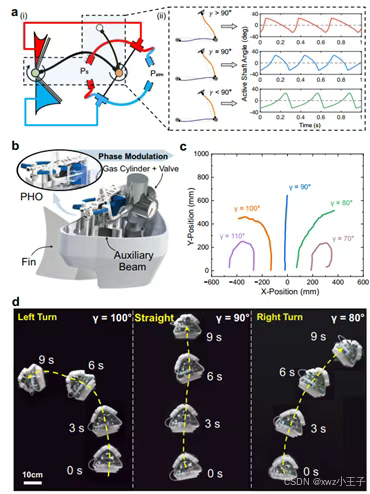
图7. 可调振荡相位的无缆化水面机器人上海交通大学陈根良教授为本文第一作者和通讯作者;上海交通大学博士研究生龙泳舟为本文共同第一作者。上海交通大学博士生姚思越为本文的第二作者。博士生唐术杰、博士生罗俊杰和王皓教授为本文共同作者。复旦大学青年研究员张壮、西湖大学工学院姜汉卿教授为本研究的共同通讯作者。该工作受到国家重点研发计划项目、国家自然科学基金,以及西湖大学未来产业研究中心和西湖教育基金会的资助。参考文献Chen, G., Long, Y., Yao, S. et al. A non-electrical pneumatic hybrid oscillator for high-frequency multimodal robotic locomotion. Nat Commun 16, 1449 (2025).论文信息发布期刊:Nature Communications发布时间:2025年2月7日论文标题 A non-electrical pneumatic hybrid oscillator for high-frequency multimodal robotic locomotionDOI: https://doi.org/10.1038/s41467-025-56704-1
Nature Communications上交、西湖大学、复旦大学研发面向机器人多模式运动的去电子化刚弹耦合高频自振荡驱动单元
news2026/2/14 13:02:01
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2329531.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
【数据结构】图的基本概念
图的定义
通俗来说一堆顶点被一堆线连在一起,这一坨顶点与线的集合
目录
图的定义
术语
有向图与无向图
简单图与多重图
度、入度与出度 路径与回路 路径长度与距离 子图 连通、连通图与连通分量 强连通、强连通图与强连通分量
完全图
生成树与生成森林
权…
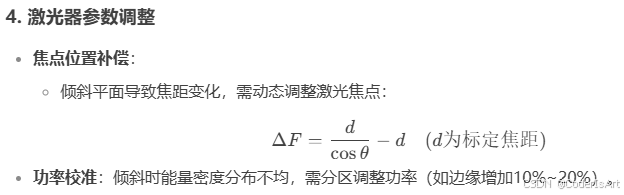
激光加工中平面倾斜度的矫正
在激光加工中,加工平面的倾斜度矫正至关重要,直接影响加工精度和材料处理效果。以下是系统的矫正方法和步骤: 5. 验证与迭代 二次测量:加工后重新检测平面度,确认残余误差。 反馈优化:根据误差分布修正补偿…

rdiff-backup备份
目录
1. 服务器备份知识点
1.1 备份策略
1.2 备份步骤和宝塔面板简介
1.3 CentOS7重要目录
2. 备份工具
2.1 tar -g
备份演示
2. rsync
备份演示
3. rdiff-backup
备份演示
4. 差异和优缺点
3. rdiff-backup安装和使用
3.1 备份命令rdiff-backup
3.2 恢复命令--…
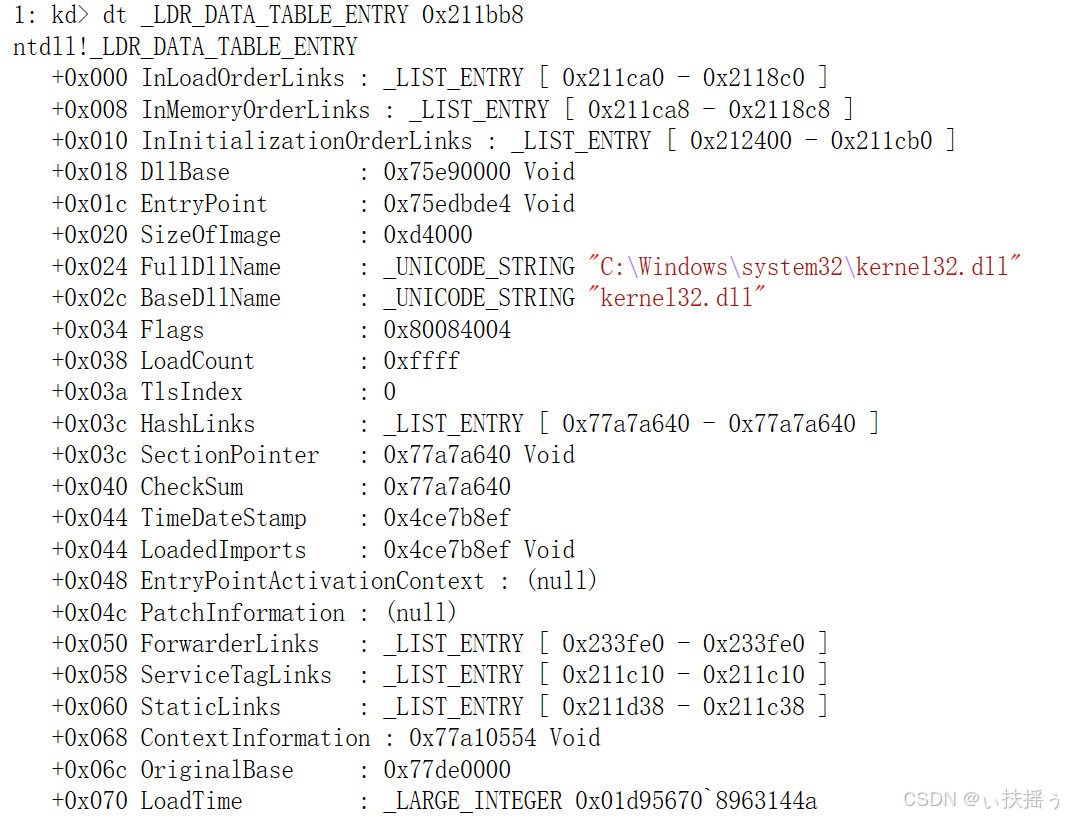
PE结构(十五)系统调用与函数地址动态寻找
双机调试
当需要分析一个程序时,这个程序一定是可以调试的,操作系统也不例外。在调试过程中下断点是很重要的
当我们对一个应用程序下断点时,应用程序是挂起的。但当我们对操作系统的内核程序下断点时,被挂起的不是内核程序而是…
webrtc 本地运行的详细操作步骤 1
前言
选修课的一个课程设计,需要我们本地运行这个开源项目,给我的压力非常大,因为确实不是很熟练这种操作。但是还是得做。谨以此文,纪念这个过程。 之前自己在 github 上面看到有代码仓库,但是比较复杂,在…
kali——httrack
目录
前言
使用教程 前言
HTTrack 是一款运行于 Kali Linux 系统中的开源网站镜像工具,它能将网站的页面、图片、链接等资源完整地下载到本地,构建出一个和原网站结构相似的离线副本。 使用教程
apt install httrack //安装httrack工具
httrac…
【计算机网络】Linux配置SNAT/DNAT策略
什么是NAT?
NAT 全称是 Network Address Translation(网络地址转换),是一个用来在多个设备共享一个公网 IP上网的技术。
NAT 的核心作用:将一个网络中的私有 IP 地址,转换为公网 IP 地址,从而…

AI安全:构建负责任且可靠的系统
AI已成为日常生活中无处不在的助力,随着AI系统能力和普及性的扩展,安全因素变得愈发重要。从基础模型构建者到采用AI解决方案的企业,整个AI生命周期中的所有相关方都必须共同承担责任。 为什么AI安全至关重要?
对于企业而言&…
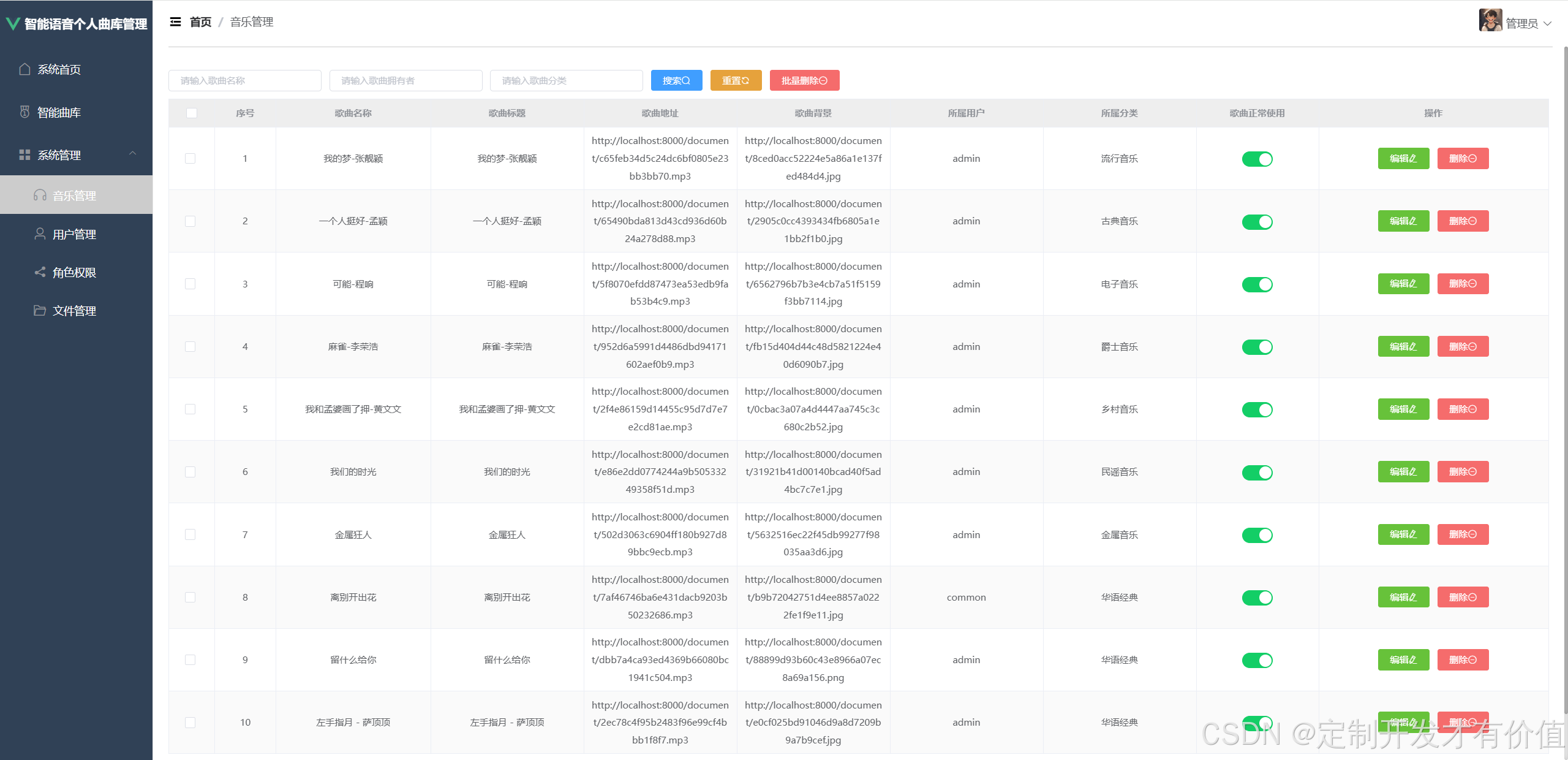
VUE+SPRINGBOOT+语音技术实现智能语音歌曲管理系统
语音控制歌曲的播放、暂停、增删改查 <template><div class"Music-container"><div style"margin: 10px 0"><!--检索部分--><el-input style"width: 200px;" placeholder"请输入歌曲名称"v-model"sen…
使用 SignalR 在 .NET Core 8 最小 API 中构建实时通知
示例代码:https://download.csdn.net/download/hefeng_aspnet/90448094
介绍 构建实时应用程序已成为现代 Web 开发中必不可少的部分,尤其是对于通知、聊天系统和实时更新等功能。SignalR 是 ASP.NET 的一个强大库,可实现服务器端代码和客户…

复古未来主义屏幕辉光像素化显示器反乌托邦效果PS(PSD)设计模板样机 Analog Retro-Futuristic Monitor Effect
这款模拟复古未来主义显示器效果直接取材于 90 年代赛博朋克电影中的黑客巢穴,将粗糙的屏幕辉光和像素化的魅力强势回归。它精准地模仿了老式阴极射线管显示器,能将任何图像变成故障频出的监控画面或高风险的指挥中心用户界面。和……在一起 2 个完全可编…

技术驱动革新,强力巨彩LED软模组助力创意显示
随着LED显示技术的不断突破,LED软模组因其独特的柔性特质和个性化显示效果,正逐渐成为各类应用场景的新宠。强力巨彩软模组R3.0H系列具备独特的可塑造型能力与技术创新,为商业展示、数字艺术、建筑装饰等领域开辟全新视觉表达空间。 LED…

Spark,HDFS概述
HDFS组成构架: 注: NameNode(nn):就是 Master,它是一个主管、管理者。 (1) 管理 HDFS 的名称空间; (2) 配置副本策略。记录某些文件应该保持几个副本; (3) 管理数据块(…

【数据结构】图论进阶:生成树、生成森林与权值网络的终极解析
图的基本概念 导读一、图中的树与森林1.1 生成树与生成森林1.1.1 生成树1.1.2 生成森林1.1.3 生成树、生成森林与连通分量结点的关系边的关系 1.2 有向图中的树与森林1.2.1 有向树与有向森林1.2.2 生产有向树与生成有向森林1.2.3 有向树与生成有向树的区别1.2.4 有向森林与生成…
C和C++(list)的链表初步
链表是构建其他复杂数据结构的基础,如栈、队列、图和哈希表等。通过对链表进行适当的扩展和修改,可以实现这些数据结构的功能。想学算法,数据结构,不会链表是万万不行的。这篇笔记是一名小白在学习时整理的。
C语言
链表部分
…
【KWDB创作者计划】_KaiwuDB 2.1.0 单节点裸机部署
大家好,这里是 DBA学习之路,专注于提升数据库运维效率。 目录 前言KWDB 介绍安装准备环境信息配置要求操作系统软件依赖端口要求安装包下载 部署 KWDB简单实用连接数据库创建数据库创建用户创建时序表 前言
今天无意间在墨天轮看到一个征文活动 征文大赛…

前端快速入门学习3——CSS介绍与选择器
1.概述
CSS全名是cascading style sheets,中文名层叠样式表。 用于定义网页样式和布局的样式表语言。 通过 CSS,你可以指定页面中各个元素的颜色、字体、大小、间距、边框、背景等样式,从而实现更精确的页面设计。
HTML与CSS的关系:HTML相当…

Redash:一个开源的数据查询与可视化工具
Redash 是一款免费开源的数据可视化与协作工具,可以帮助用户快速连接数据源、编写查询、生成图表并构建交互式仪表盘。它简化了数据探索和共享的过程,尤其适合需要团队协作的数据分析场景。 数据源
Redash 支持各种 SQL、NoSQL、大数据和 API 数据源&am…
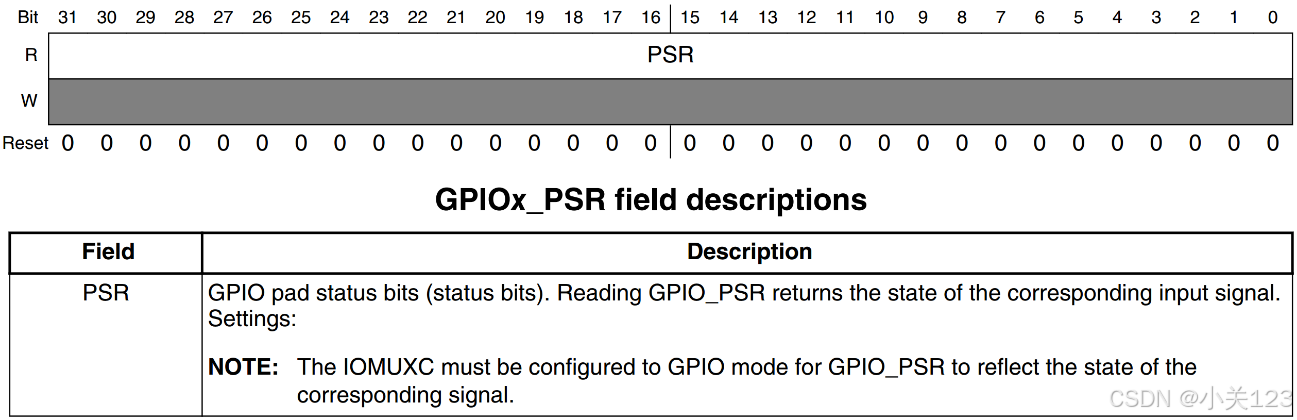
嵌入式Linux驱动—— 1 GPIO配置
目录
1.GPIO操作
1.1 IO命名
1.2 GPIO 时钟使能(CCM)
1.3 IO 复用(IOMUXC)
1.4 IO 配置
1.5 GPIO 配置 1.GPIO操作
GPIO操作主要是以下流程:
使能某组GPIO模块(GPIO1、2、...)&#…