前言
本文是博主在学习A*算法时做的一个小案例,有不懂的地方可以私信博主一起讨论学习,由于博主水平有限,可能存在部分知识点遗漏或书写不够严谨,欢迎各位志同道合的朋友批评指教,博主定当虚心学习,感谢各位阅读。
一. 基本概念
A*算法在Dijkstra算法的基础上引入了启发函数,启发函数是对当前节点到目标节点所需代价的预估,有助于提高搜索速度。相较于Dijkstra算法,A*算法搜索最短路径的效率更高。启发式函数一般使用曼哈顿距离、欧几里德距离。原理:从起点开始不断向目标点的方向遍历(常见的遍历方式分为八邻域、四邻域),并记录下每一个遍历点的父节点(找到目标点后回溯路径),反复循环,直到搜索到目标点后停止,再从目标点回溯起点,找到成本最小的路径。
优点:启发式函数能提高算法的运行效率,更快的找到最优路径。
缺点:地图尺寸过大或精度过高时,需要搜索的节点数量较多,搜索速度慢。
成本函数:
是从起点到目标点的成本估计;
是起点到达中间点的实际成本;
中间点到目标点的估计距离。
假设起点:;中间点:
;目标点:
。
实际距离: ;
曼哈顿距离(如图1):;
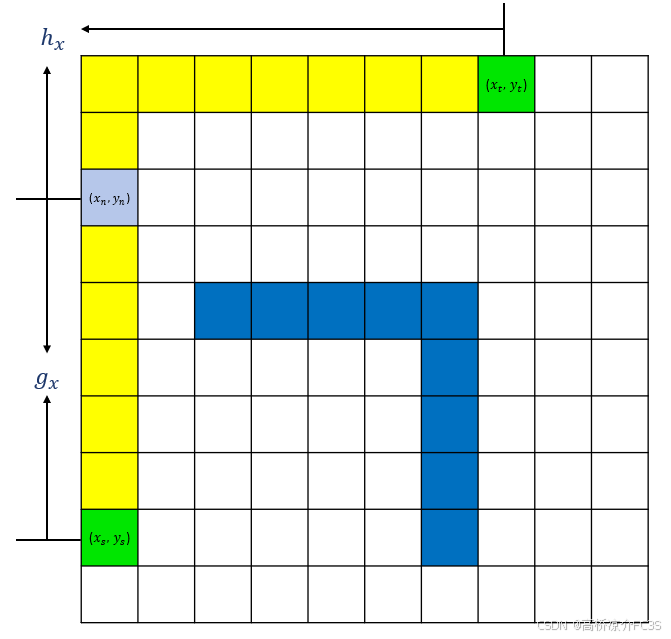
图1
欧几里德距离(如图2):
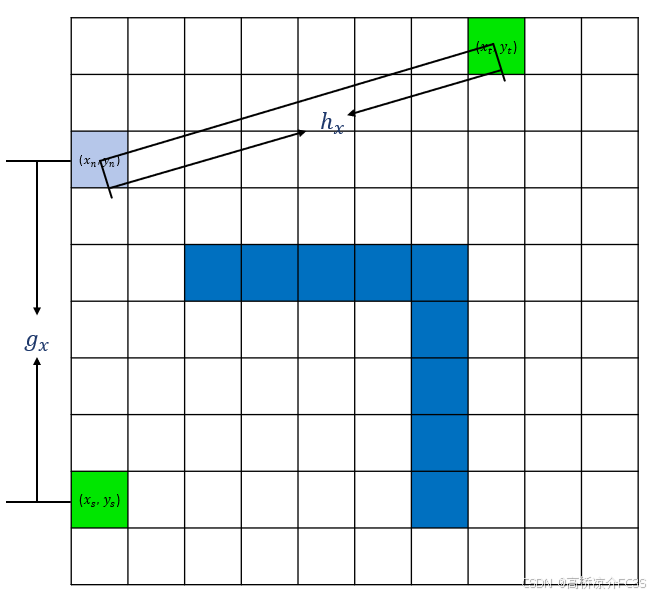
图2
二. 寻路实例
这里通过一个实例来记录我学习A*寻路算法的全过程:以采用曼哈顿距离为估计代价的成本函数为例(因为欧几里德距离的计算涉及到平方和开根号,步骤更加复杂,对算力的要求更高,所以一般采用曼哈顿距离),深蓝色为障碍物,两个绿色点分别为起始点和目标点(前文已做假设),将横直线移动一格的距离记作10,斜移一格的距离记作14。
在实例中建立两个集合,分别是openlis和closelist。openlis用于记录所有已经遍历过的点(图中的红色格子),这些点可以被重复遍历并更新距离成本;closelist用于记录在当前位置所有遍历点中距离成本最小的点(来源于closelist集合,图中的浅蓝色格子),且放入closelist集合里的点不再重复遍历更新。
1.遍历起始点附近邻域的八个点(由于起始点位置原因例中只有五个),并通过代价函数
计算邻域中每一个点的距离成本(已写在每个格子中),此轮遍历距离成本最小的点为10+130=144,将此点放入closelist中,并标记为浅蓝色,如图3。
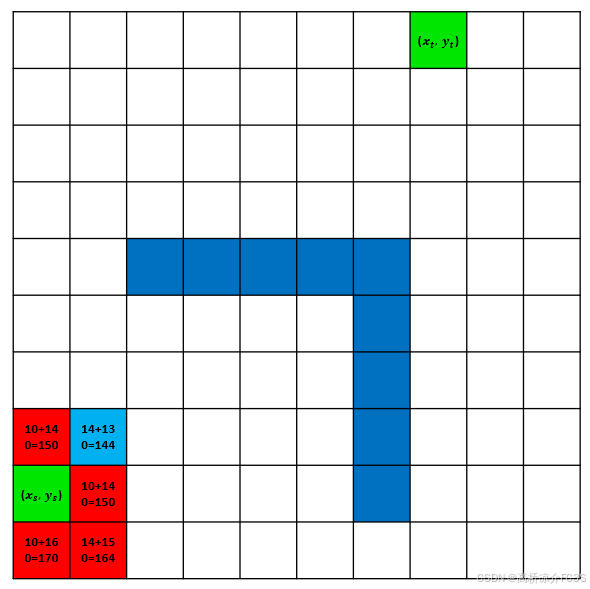
图3
2.遍历图3中距离成本最小的点的附近邻域,同样通过代价函数计算邻域中每一个点的距离成本(如图4),此轮距离成本最小的点为28+110=138,将此点放入closelist中,并标记为浅蓝色。
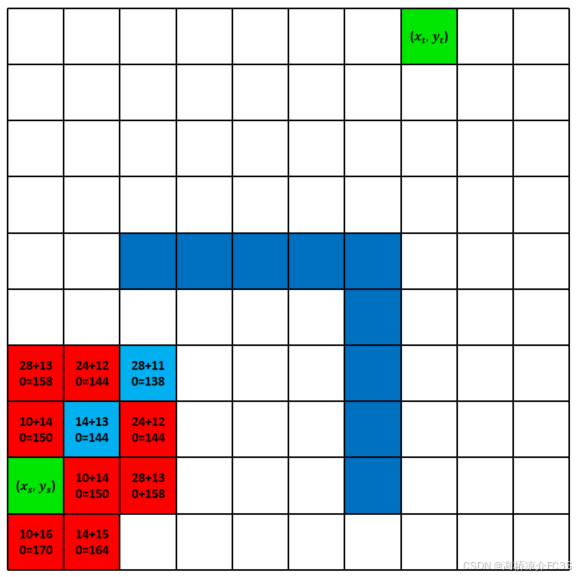
图4
3.每一轮遍历都是按照此原理进行的,没有特殊情况便不再过多赘述,下面直接给出几轮遍历的结果(图5-图7),遇到特殊情况,后文会给出详细解释。
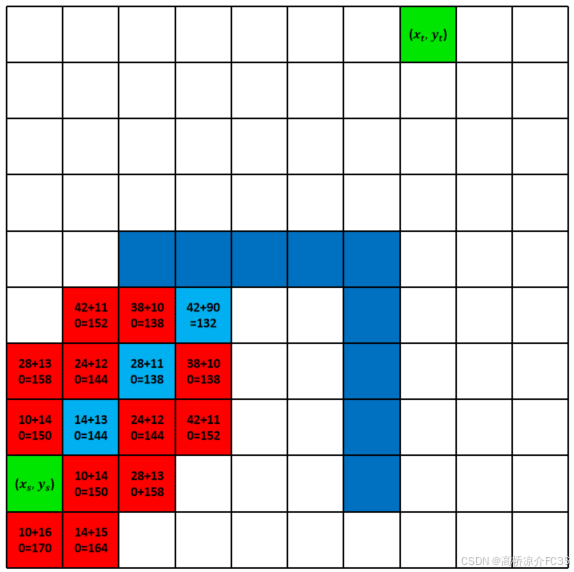
图5
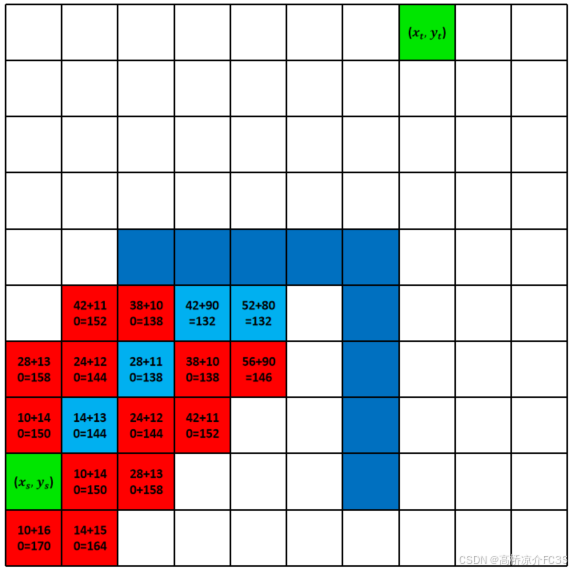
图6

图7
4.图7中选出的上一轮成本最小的点为62+70=132,但遍历此点的邻域后发现此点邻域并不存在openlis中成本最小的点,所以此时从openlis中选出成本最小的点不再是62+70=132这个点的邻域(每一轮都是从openlis中选取最小的点放入colselist中,只是前几轮成本最小的点刚好在上一轮最小点的邻域)。如图8:此轮从openlis中选出的最小点是38+100=138(注意:此时出现了两个最小点,读者可以根据自己的习惯,在算法中设置优先选择先遍历到的那个点或者后遍历到的那个点。这里的两个点虽然都是第二轮最小点28+110=138的邻域,看似不能判断其先后顺序,但可在算法中设置遍历一个点邻域的顺序,这里假设从此邻域的正右方邻域顺时针计算每个邻域的距离,那么28+110=138正上方的点便是后遍历到的那个最小点),为了方便对比这两个点的区别,我在这里同时选中了这两个点放入colselist中,并同时计算两个点的邻域,这一轮遍历出现了对openlis中距离成本的更新(黄色字体为本轮遍历距离小于此前遍历距离的点,并更新了数据。注意:更新后的点,父节点也会随之改变为前一轮最小的点)。
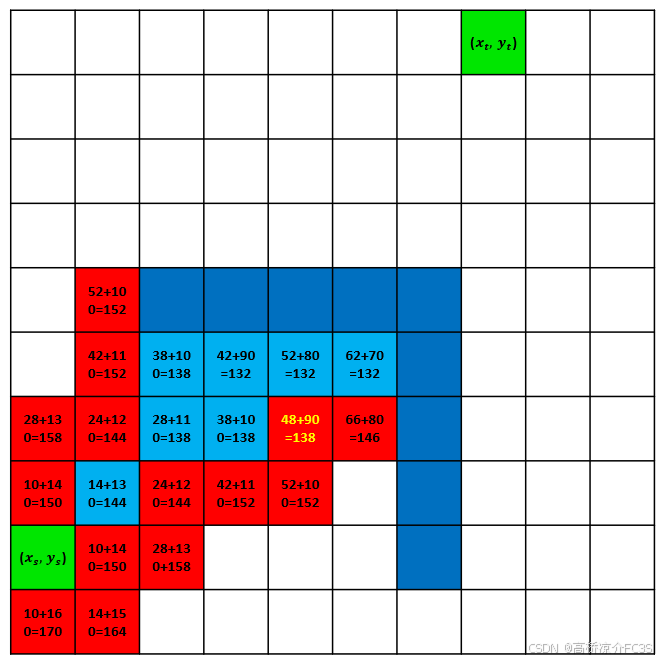
图8
5.从上一轮遍历后的openlis中选出距离成本最小的点,刚好是上一轮更新的点48+90=138。
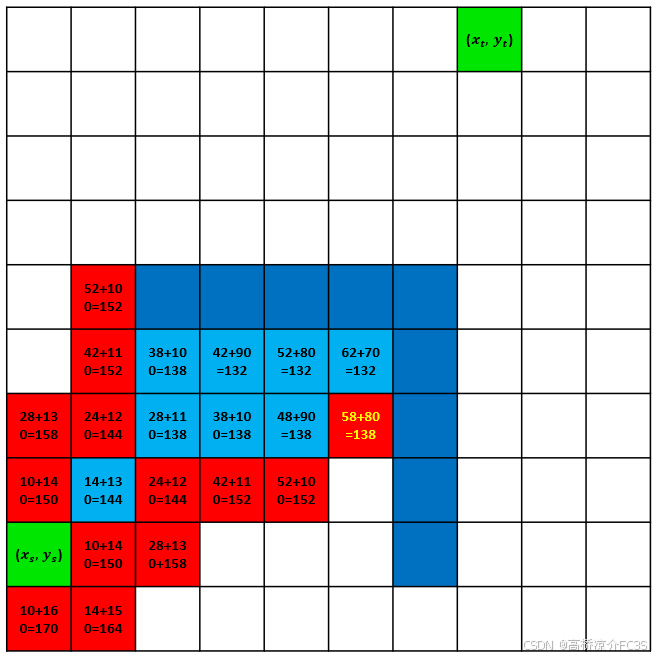
图9
6.图10中选出的上一轮成本最小的点为58+80=138,但遍历此点的邻域后发现此点邻域并不存在openlis中成本最小的点,所以此时从openlis中选出成本最小的点不再是58+80=138这个点的邻域,而是整个openlis中距离成本最小的点24+122=144,这一轮我依旧选择了两个点,如图11,同前文不再赘述。
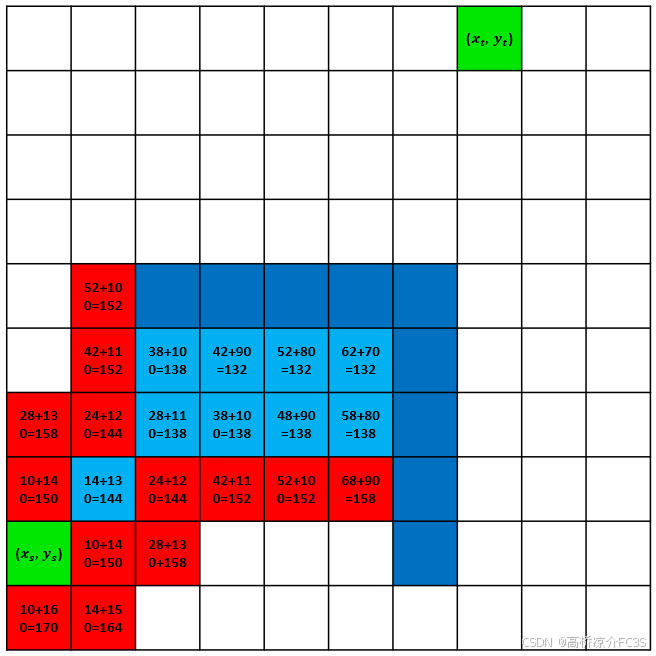
图10
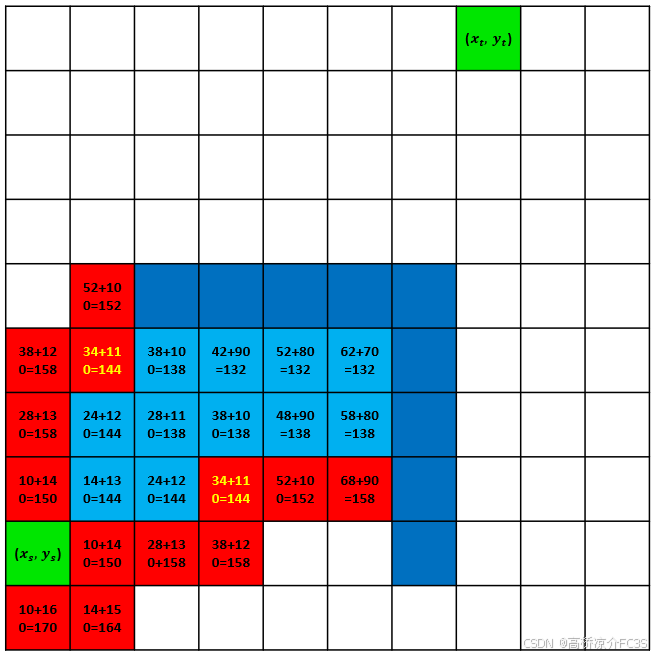
图11
7.我在此实例中遇到的特殊情况和要说明的重点基本讲完,下面我会直接给出每一轮遍历的结果。
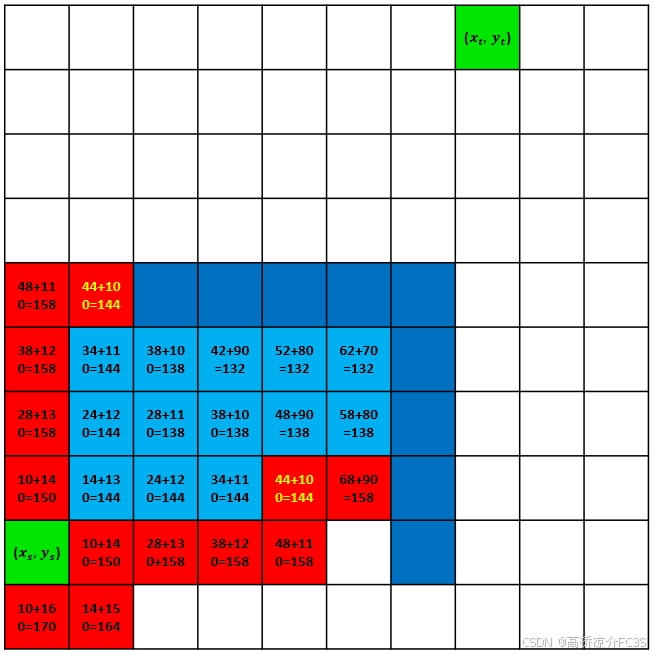
图12
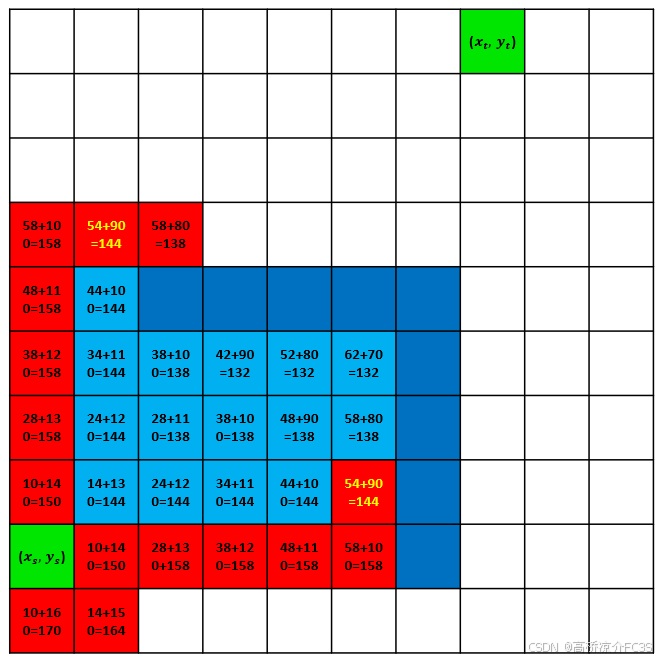
图13
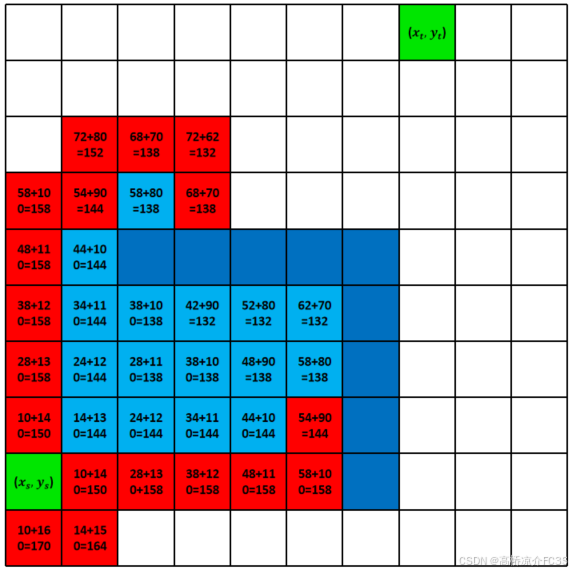
图14
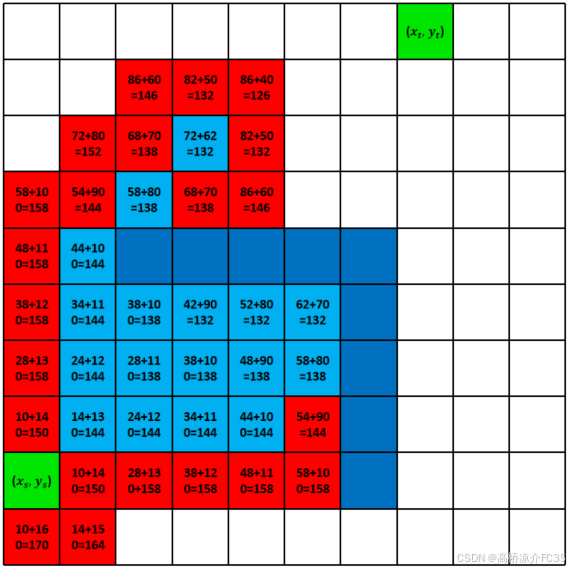
图15
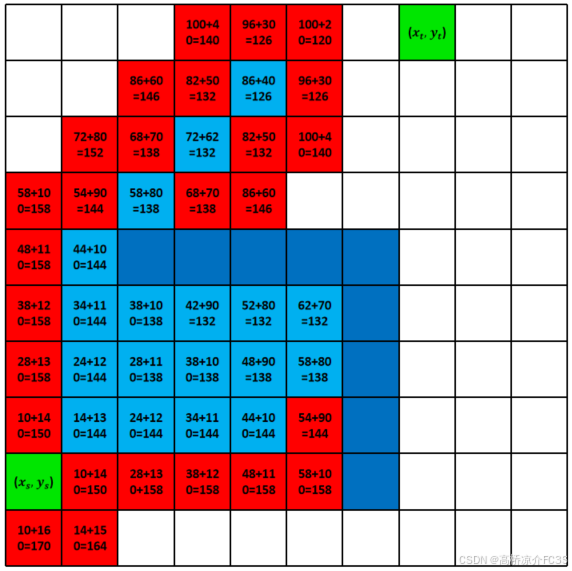
图16
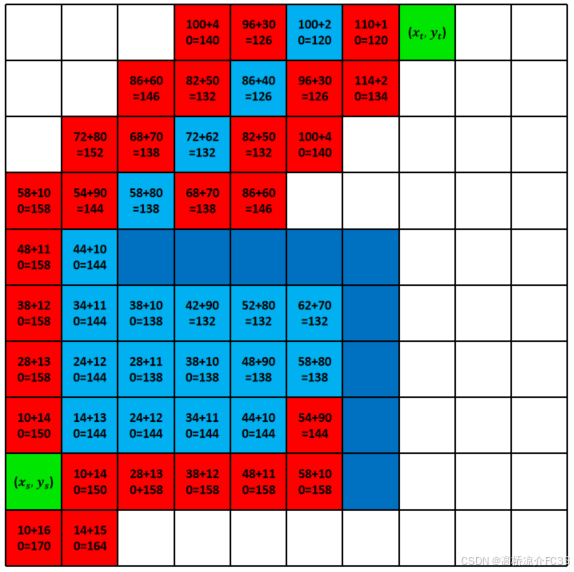
图17
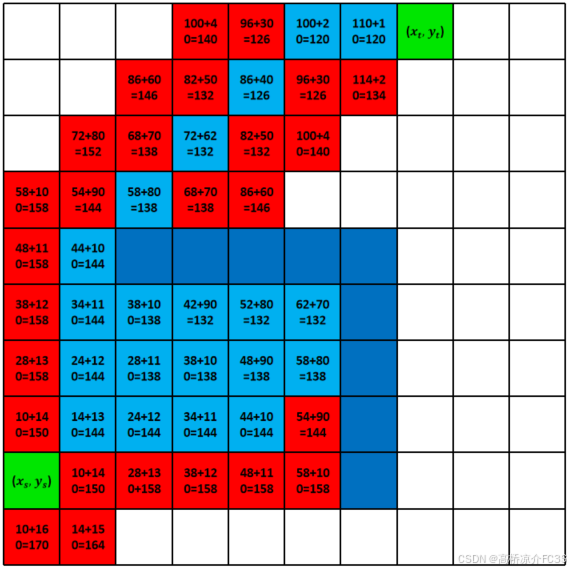
图18
8.A*算法经过启发式遍历,最终找到了目标点,根据父节点的记录,从目标点向起始点回溯,找到了最短路径——黄色格子连线。(这里提出一个疑惑点:在图19的路径中从44+100=144这个点向58+80=138这个点移动时,需要从障碍物边缘经过,但不能保证机器人或车辆不碰到障碍物,如何通过优化算法来解决这个问题,欢迎大家评论区或私信讨论)
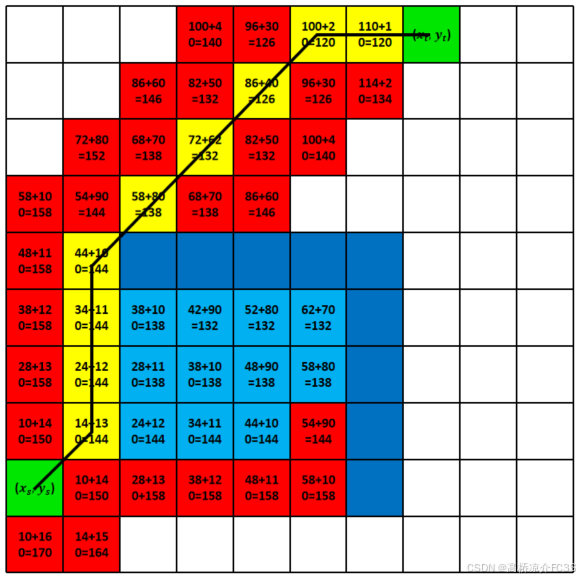
图19
9.以上实例是A*算法八邻域搜索的结果,在同样的条件下四邻域搜索的结果如图20和图21。图20和图21的区别是:当openlis中出现多个相同距离的最小点时,优先选择最先遍历的点和最后遍历的点。
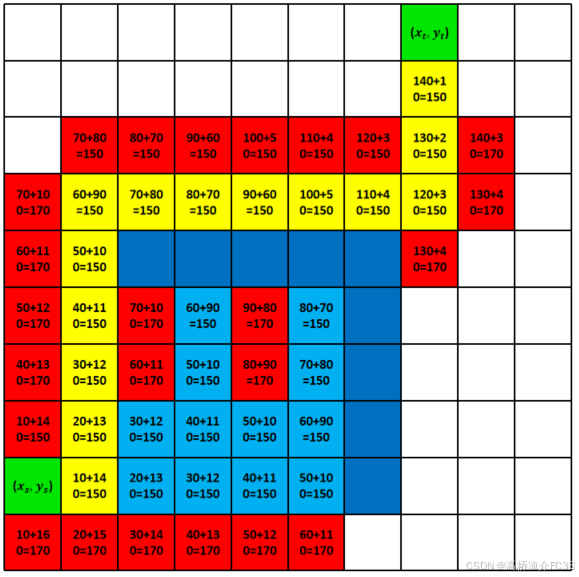
图20
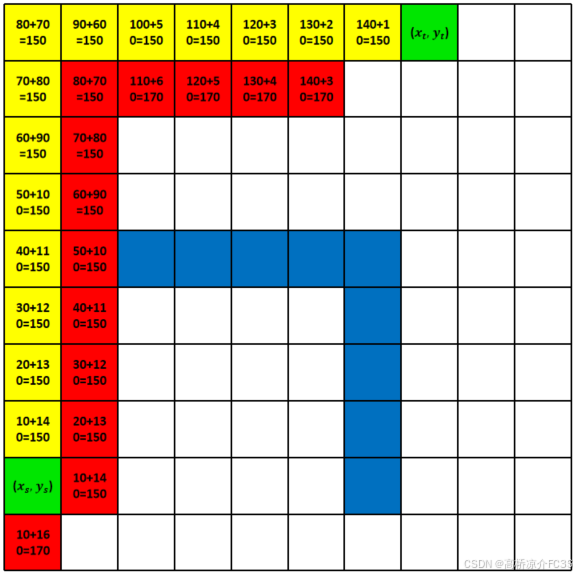
图21







![Sentinel[超详细讲解]-7 -之 -熔断降级[异常比例阈值]](https://i-blog.csdnimg.cn/direct/5171811eff8644179f84d8c948ba983a.jpeg)