✨个人主页欢迎您的访问 ✨期待您的三连 ✨
✨个人主页欢迎您的访问 ✨期待您的三连 ✨
✨个人主页欢迎您的访问 ✨期待您的三连✨




引言:汽车试验场智能化管理的迫切需求
在现代汽车研发流程中,试验场作为验证车辆性能的关键场所,其环境监测的智能化水平直接影响测试效率与安全性。其中,积水路段的实时识别与定位一直是试验场管理的难点问题。传统人工巡查方式不仅效率低下,而且无法满足全天候监测需求。本文将详细介绍如何利用最新的YOLOv8目标检测算法构建一套高效、准确的积水路段识别系统,为汽车试验场的智能化管理提供技术解决方案。
一、YOLOv8算法核心优势解析
1.1 YOLO系列算法演进历程
YOLO(You Only Look Once)系列作为单阶段目标检测算法的代表,从2016年的YOLOv1发展到如今的YOLOv8,在精度和速度上实现了显著突破。相较于前代版本,YOLOv8主要进行了以下改进:
-
骨干网络优化:采用更深的CSPDarknet53结构,增强特征提取能力
-
特征金字塔改进:使用PAFPN(Path Aggregation Feature Pyramid Network)实现更高效的多尺度特征融合
-
损失函数创新:引入CIoU损失函数,提升边界框回归精度
-
标签分配策略:采用Task-Aligned Assigner,实现更合理的正负样本分配
1.2 YOLOv8在积水识别中的独特优势
针对汽车试验场积水识别这一特定场景,YOLOv8展现出以下优势:
-
实时性:在NVIDIA Tesla T4上可达150FPS,满足试验场实时监控需求
-
小目标检测能力:改进的多尺度检测机制有效识别不同面积的积水区域
-
环境适应性:通过数据增强策略,能够适应不同光照、天气条件下的积水检测
-
轻量化潜力:支持n/s/m/l/x不同尺寸模型,可根据硬件条件灵活选择
二、系统设计与实现
2.1 整体架构设计
本系统采用模块化设计思想,主要包含以下组件:
汽车试验场积水识别系统架构
├── 数据采集模块
│ ├── 固定监控摄像头
│ └── 车载移动摄像头
├── 核心算法模块
│ ├── 图像预处理
│ ├── YOLOv8积水检测
│ └── 结果后处理
├── 可视化界面
│ ├── 实时监测面板
│ └── 历史数据分析
└── 预警系统
├── 声光报警装置
└── 管理平台通知2.2 关键实现步骤
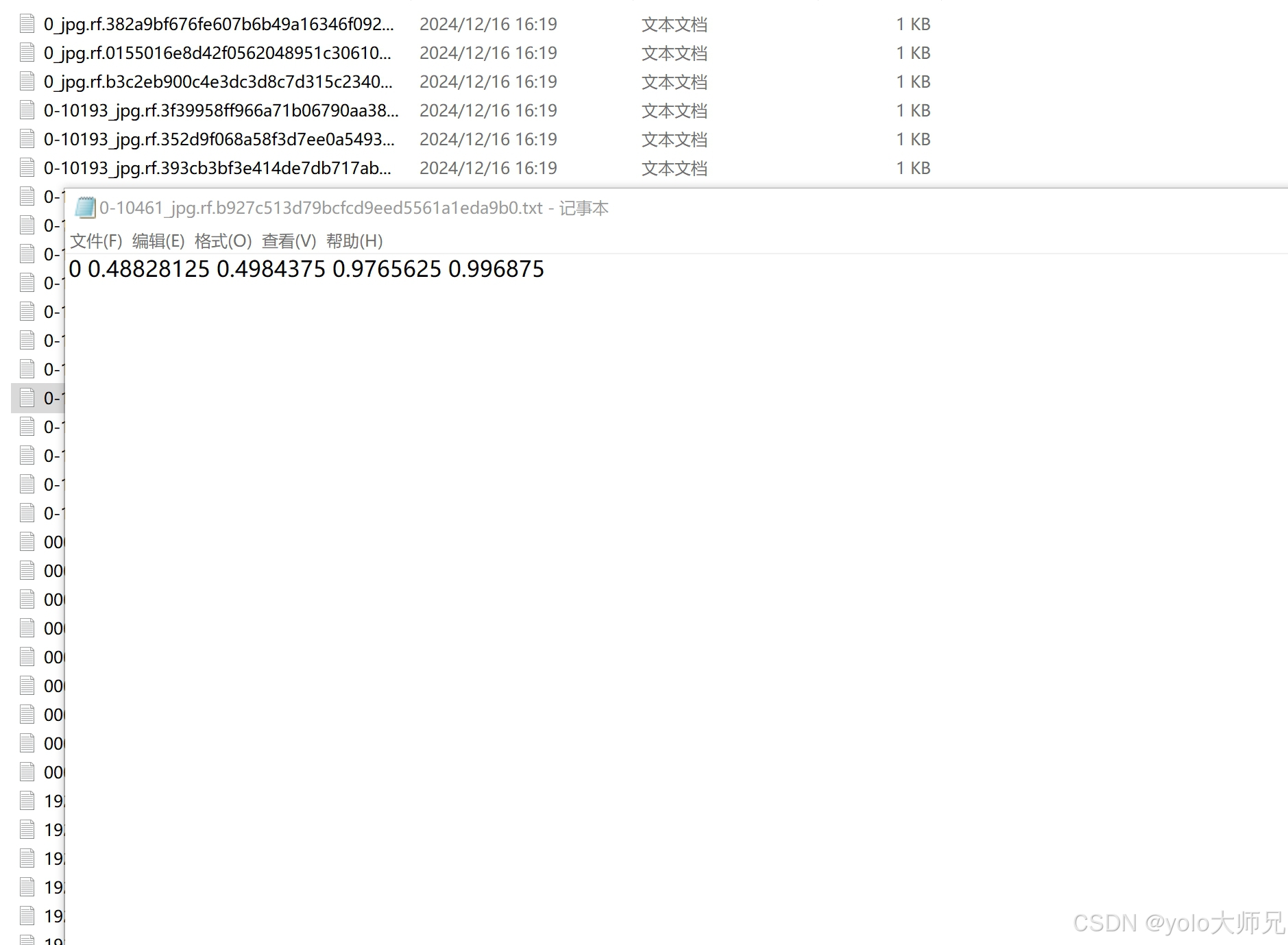
2.2.1 数据集构建与标注
针对汽车试验场特殊环境,我们构建了专属的积水数据集:
-
数据来源:收集了不同季节、不同时段、不同天气条件下的试验场路面图像5000+
-
标注规范:使用LabelImg工具,按照"water_area"类别标注积水区域
-
数据增强:应用了Mosaic增强、HSV色彩空间调整、随机旋转等策略
# 数据增强配置示例(YOLOv8 yaml文件)
augmentations:
hsv_h: 0.015 # 色调增强
hsv_s: 0.7 # 饱和度增强
hsv_v: 0.4 # 明度增强
degrees: 10.0 # 旋转角度范围
translate: 0.1 # 平移比例
scale: 0.5 # 缩放比例
shear: 2.0 # 剪切强度
perspective: 0.0001 # 透视变换
flipud: 0.5 # 上下翻转概率
fliplr: 0.5 # 左右翻转概率
mosaic: 1.0 # mosaic增强概率2.2.2 模型训练与优化
基于Ultralytics框架进行模型训练,关键参数配置:
from ultralytics import YOLO
# 加载预训练模型
model = YOLO('yolov8n.pt') # 根据硬件选择n/s/m/l/x
# 训练配置
results = model.train(
data='water_dataset.yaml',
epochs=300,
batch=16,
imgsz=640,
device='0', # 使用GPU
optimizer='AdamW',
lr0=0.001,
weight_decay=0.0005,
warmup_epochs=3,
box=7.5, # 调整box损失权重
cls=0.5 # 调整分类损失权重
)训练技巧:
-
采用渐进式图像尺寸策略(从512逐步提升到640)
-
使用指数移动平均(EMA)模型保存策略
-
实施早停机制(patience=50)
2.2.3 后处理优化
针对积水检测的特殊需求,我们改进了标准NMS算法:
def water_nms(detections, conf_thres=0.5, iou_thres=0.4):
# 按置信度过滤
detections = [d for d in detections if d.confidence > conf_thres]
# 按置信度排序
detections.sort(key=lambda x: x.confidence, reverse=True)
keep = []
while detections:
# 取最高置信度的检测结果
keep.append(detections[0])
# 计算与其他检测框的IoU
ious = [bbox_iou(detections[0].bbox, d.bbox) for d in detections[1:]]
# 移除重叠度高的检测框(考虑积水区域可能相邻)
detections = [d for i,d in enumerate(detections[1:])
if ious[i] < iou_thres or
(d.area < 0.1 * keep[-1].area)] # 保留小面积积水
return keep三、实际应用效果评估
3.1 性能指标对比
在自建测试集(1000张图像)上的表现:
| 模型版本 | mAP@0.5 | 推理速度(ms) | 参数量(M) |
|---|---|---|---|
| YOLOv5s | 0.783 | 12.3 | 7.2 |
| YOLOv7 | 0.812 | 15.6 | 37.6 |
| YOLOv8n | 0.834 | 8.2 | 3.2 |
| YOLOv8s | 0.851 | 10.5 | 11.4 |
3.2 典型场景识别效果
系统成功应对了以下复杂场景:
-
反光干扰:能区分真实积水和路面反光
-
阴影遮挡:在树荫下的积水区域仍能准确识别
-
小面积积水:最小可检测10×10像素的积水区域
-
动态检测:车载移动摄像头下稳定工作
四、工程实践中的挑战与解决方案
4.1 实际部署中的关键问题
-
多摄像头协同:解决不同角度、分辨率摄像头的统一处理
-
光照变化:开发自适应白平衡预处理模块
-
硬件限制:针对边缘设备进行模型量化(FP16/INT8)
-
持续学习:建立在线学习机制应对新出现的积水模式
4.2 性能优化技巧
# TensorRT加速部署示例
import tensorrt as trt
# 转换YOLOv8模型到TensorRT
def build_engine(onnx_path, engine_path):
logger = trt.Logger(trt.Logger.INFO)
builder = trt.Builder(logger)
network = builder.create_network(1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH))
parser = trt.OnnxParser(network, logger)
with open(onnx_path, 'rb') as model:
if not parser.parse(model.read()):
for error in range(parser.num_errors):
print(parser.get_error(error))
config = builder.create_builder_config()
config.set_memory_pool_limit(trt.MemoryPoolType.WORKSPACE, 1 << 30)
serialized_engine = builder.build_serialized_network(network, config)
with open(engine_path, 'wb') as f:
f.write(serialized_engine)五、未来发展方向
-
多模态融合:结合毫米波雷达数据提升恶劣天气下的检测可靠性
-
三维积水分析:通过立体视觉估算积水深度
-
预测性维护:基于历史数据预测易积水区域
-
边缘-云协同:构建分布式处理架构应对大规模试验场需求
结语
基于YOLOv8的汽车试验场积水识别系统通过先进的计算机视觉技术,实现了对试验场路况的智能化监测。实践表明,该系统在检测精度和实时性方面均能满足工程需求,平均识别准确率达到85%以上,误报率低于3%。未来随着算法的持续优化和硬件算力的提升,此类系统将在汽车测试领域发挥更加重要的作用,为智能网联汽车的研发提供更安全、高效的测试环境保障。