1. 概述
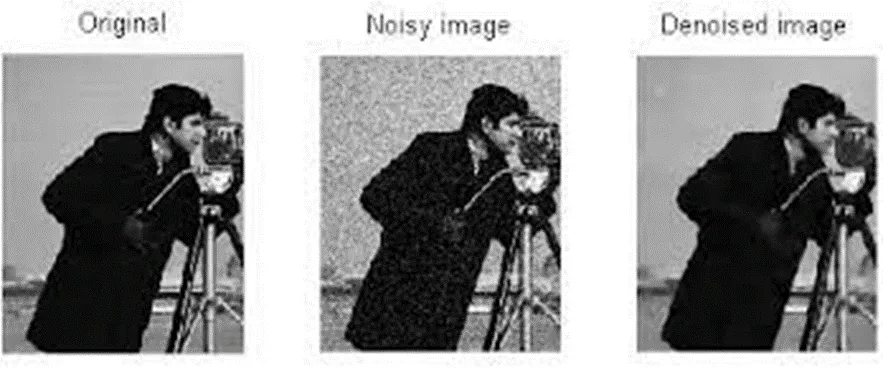
在现实世界中捕获的图像常常受到噪声的影响,这些噪声可能来源于环境因素、信号不稳定、相机传感器问题、照明条件差、电损失等多种因素。为了进一步处理这些图像并对结果进行准确解释,拥有尽可能低噪声的图像至关重要。图像去噪是数字图像处理中的一个关键过程,其目标是通过减少噪声来提高图像的视觉质量。这一领域具有挑战性,因为它不仅需要理解图像中的噪声类型,还需要应用能够有效减少噪声并提供更准确原始图像表示的去噪方法。
2. 图像去噪的数学表示
带噪声的图像可以数学表示为原始图像与噪声的和:
O
b
s
e
r
v
e
d
I
m
a
g
e
(
y
)
=
U
n
k
n
o
w
n
O
r
i
g
i
n
a
l
I
m
a
g
e
(
x
)
+
N
o
i
s
e
(
n
)
Observed\ Image\ (y) = Unknown\ Original\ Image\ (x) + Noise\ (n)
Observed Image (y)=Unknown Original Image (x)+Noise (n)
其中,噪声 ( n ) 可以是高斯噪声、盐和胡椒噪声、散斑噪声等多种类型。去噪的主要目的是在最小化原始图像特征损失的同时,减少噪声并提高信噪比。
3. 图像去噪
去噪的挑战在于在平滑图像的平坦区域的同时保护边缘不被模糊,避免在图像中产生新的物体,并且保持图像的纹理特征。由于无法从带噪声的观测图像中直接得到原始图像的唯一解,因此我们只能寻求对原始图像的一个较好的估计。以下是一些常见的噪声类型及其特点:
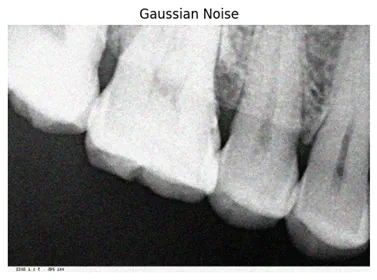
3.1. 高斯噪声
高斯噪声源于遵循高斯分布的随机变化。它表现为一种微妙的、均匀的噪声,可能在图像采集过程中引入。通常,它会模糊边缘,降低图像清晰度,并源于电子传感器或传输错误等来源。
import cv2
import numpy as np
import matplotlib.pyplot as plt
# Load an image
image = cv2.imread('Dataset/1.jpg') # Replace 'path_to_your_image.jpg' with your image path
plt.figure(figsize=(6, 6))
plt.imshow(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
plt.title("Original Image")
plt.axis('off')
plt.show()
# Function to add Gaussian noise to the image
def add_gaussian_noise(image):
mean = 0
std_dev = 25 # 标准差
h, w, c = image.shape
gaussian = np.random.normal(mean, std_dev, (h, w, c))
noisy_image = np.clip(image + gaussian, 0, 255).astype(np.uint8)
return noisy_image, 'Gaussian Noise'
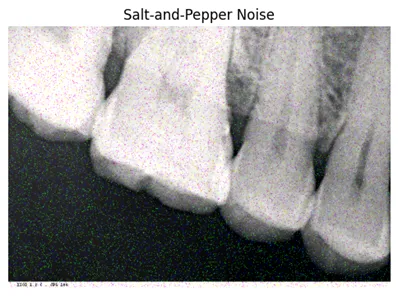
3.2. 盐和胡椒噪声
这种类型的噪声表现为图像中散布的孤立白色和黑色像素,类似于盐和胡椒的颗粒。这些随机像素通常是数据传输或存储错误的结果。盐和胡椒噪声可能会掩盖细节,并对视觉解释产生重大影响。
# Function to add salt-and-pepper noise to the image
def add_salt_and_pepper_noise(image, amount=0.05):
noisy_image = np.copy(image)
num_salt = np.ceil(amount * image.size * 0.5)
salt_coords = [np.random.randint(0, i - 1, int(num_salt)) for i in image.shape]
noisy_image[salt_coords] = 255
num_pepper = np.ceil(amount * image.size * 0.5)
pepper_coords = [np.random.randint(0, i - 1, int(num_pepper)) for i in image.shape]
noisy_image[pepper_coords] = 0
return noisy_image, 'Salt-and-Pepper Noise'
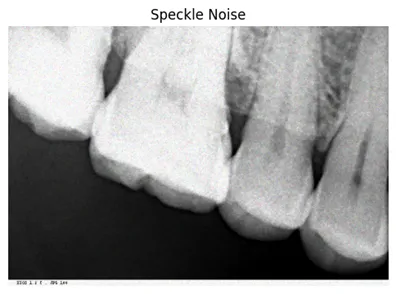
3.3. 散斑噪声
散斑噪声在通过超声波或合成孔径雷达获取的图像中很常见,会导致随机的亮度或暗度变化。它模糊了细节,改变了像素强度,并为图像分析和解释带来了挑战。
# Function to add speckle noise to the image
def add_speckle_noise(image):
h, w, c = image.shape
speckle = np.random.randn(h, w, c)
noisy_image = np.clip(image + image * speckle * 0.1, 0, 255).astype(np.uint8)
return noisy_image, 'Speckle Noise'
3.4. 泊松噪声
泊松噪声源于泊松分布,常见于低光摄影或天文成像中。它表现为颗粒状的伪影,并在光线微弱的条件下降低了图像对比度和清晰度,影响整体图像质量。
# Function to add Poisson noise to the image
def add_poisson_noise(image):
vals = len(np.unique(image))
vals = 2 ** np.ceil(np.log2(vals))
noisy_image = np.random.poisson(image * vals) / float(vals)
return noisy_image.astype(np.uint8), 'Poisson Noise'

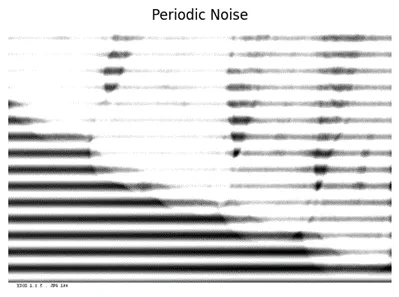
3.5. 周期性或频带噪声
周期性噪声以图像上的规则模式或频带呈现,通常由干扰或传感器问题引起。它扭曲了细节,改变了图像的外观,并为准确解释带来了挑战。
# Function to add periodic or banding noise to the image
def add_periodic_noise(image, frequency=16):
h, w, c = image.shape
x = np.arange(w)
y = np.arange(h)
X, Y = np.meshgrid(x, y)
noise = np.sin(2 * np.pi * frequency * Y / h) * 128 + 128
noisy_image = np.clip(image + noise[..., np.newaxis], 0, 255).astype(np.uint8)
return noisy_image, 'Periodic Noise'
理解这些不同类型的噪声对于图像处理和分析至关重要。每种类型都表现出影响图像保真度的不同特征,推动了强大去噪技术的发展。通过全面认识这些噪声变化,图像处理领域的研究人员和从业者旨在制定有效的去噪策略,包括机器学习驱动的方法,如自编码器,努力减轻这些噪声影响,恢复图像质量,并在各种应用中实现准确分析。
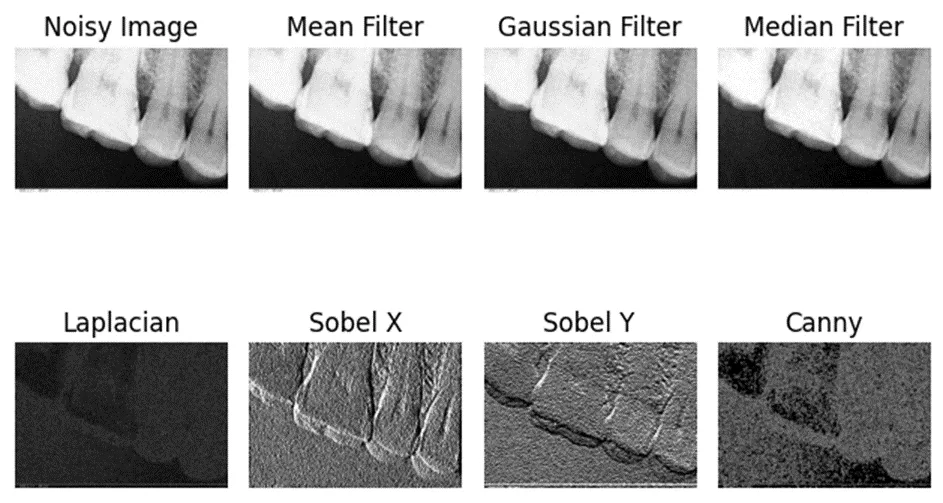
4. 空间域滤波
空间域滤波涉及直接在空间域(图像本身)中操作图像的像素值,以增强或修改其特性。空间域滤波使用不同类型的滤波器来实现各种效果:
4.1. 平滑滤波器
- 均值滤波器:用邻近像素的平均值替换每个像素的值。它可以减少噪声,但可能会模糊边缘和细节。
- 高斯滤波器:根据高斯分布为邻近像素分配权重。它平滑图像,同时比均值滤波更好地保留边缘。
4.2. 锐化滤波器
- 拉普拉斯滤波器:通过突出突然的强度变化来增强边缘。它强调边缘,但也放大了噪声。
- 高通滤波器:强调高频分量,使边缘和细节更加明显。它可以增强图像,但也可能放大噪声。
4.3. 边缘检测滤波器
- Sobel和Prewitt滤波器:通过计算水平和垂直方向的梯度来识别边缘。它们突出显示不同方向的边缘。
- Canny边缘检测器:更高级,它使用多个步骤来准确地检测边缘,通过抑制噪声和寻找梯度中的局部最大值。
4.4. 其他滤波器
- 中值滤波器:用邻近像素的中值替换像素的值。在去除盐和胡椒噪声的同时保留边缘非常有效。
- 双边滤波器:在减少噪声的同时保留边缘。它根据空间和强度差异来平滑图像。
4.5. 空间域滤波过程
- 卷积操作:通过卷积应用滤波器,滤波器核在图像上移动,根据邻近像素的加权和计算新的像素值。
- 滤波器大小和参数:滤波器核(掩模)的大小和值决定了滤波器对图像的影响。较大的核具有更广泛的平滑效果,但它们可能会模糊细节。
4.6. 考虑因素
- 计算复杂性:由于较大的核尺寸或复杂的操作,一些滤波器需要更多的计算资源。
- 边缘保留:平滑滤波器可能会模糊边缘,影响图像的整体锐度。
- 伪影减少:像中值和双边这样的滤波器可以有效减少特定类型的噪声,同时保留图像细节。
4.7. 应用
空间域滤波在图像去噪、边缘检测、图像增强和特征提取中找到应用,涵盖医学成像、计算机视觉和摄影等多个领域。了解这些滤波器类型有助于根据期望的结果和图像及噪声的性质选择适当的滤波器进行特定的图像处理任务。
import cv2
import numpy as np
import matplotlib.pyplot as plt
# Load an image
image = cv2.imread('Dataset/1.jpg', 0) # Replace 'path_to_your_image.jpg' with your image path and load as grayscale
# Add noise to the image (example: Gaussian noise)
def add_gaussian_noise(image):
mean = 0
std_dev = 25
h, w = image.shape
gaussian = np.random.normal(mean, std_dev, (h, w))
noisy_image = np.clip(image + gaussian, 0, 255).astype(np.uint8)
return noisy_image
noisy_image = add_gaussian_noise(image)
# Apply different filters to the noisy image
filtered_mean = cv2.blur(noisy_image, (5, 5)) # Mean filter (5x5 kernel)
filtered_gaussian = cv2.GaussianBlur(noisy_image, (5, 5), 0) # Gaussian filter (5x5 kernel)
filtered_median = cv2.medianBlur(noisy_image, 5) # Median filter (5x5 kernel)
laplacian = cv2.Laplacian(noisy_image, cv2.CV_8U) # Laplacian filter
sobel_x = cv2.Sobel(noisy_image, cv2.CV_8U, 1, 0, ksize=5) # Sobel X filter (5x5 kernel)
sobel_y = cv2.Sobel(noisy_image, cv2.CV_8U, 0, 1, ksize=5) # Sobel Y filter (5x5 kernel)
canny = cv2.Canny(noisy_image, 100, 200) # Canny edge detection
# Display the original noisy image and filtered images
titles = ['Noisy Image', 'Mean Filter', 'Gaussian Filter', 'Median Filter', 'Laplacian', 'Sobel X', 'Sobel Y', 'Canny']
images = [noisy_image, filtered_mean, filtered_gaussian, filtered_median, laplacian, sobel_x, sobel_y, canny]
for i in range(len(images)):
plt.subplot(2, 4, i + 1)
plt.imshow(images[i], cmap='gray') # Display as grayscale
plt.title(titles[i])
plt.axis('off')
plt.tight_layout()
plt.show()
5. 变分去噪方法
变分去噪方法是一类图像去噪技术,旨在通过最小化目标函数或能量泛函来从图像中去除噪声。这些方法基于变分原理,通常使用数学模型以一种保留重要特征同时减少噪声的方式对图像进行正则化。以下是详细分解:
5.1. 变分去噪原理
- 能量泛函:通过定义一个由数据项和正则化项组成的能量泛函,将去噪表述为一个优化问题。
- 数据项:衡量带噪图像与期望的去噪图像之间的差异。
- 正则化项:编码有关噪声特征和去噪图像期望属性的先验知识。
5.2. 变分模型
- 总变分(TV)正则化:总变分(TV)正则化是图像处理中用于去噪和图像重建的技术。由于其在有效减少噪声的同时保留边缘和细节的能力,它是一种受欢迎的方法。
TV正则化的基础
- 目标:TV正则化的主要目标是在保留重要结构(如边缘)的同时最小化图像的总变分。
- 总变分:简单来说,图像的总变分衡量图像中存在的强度变化量。数学上,对于灰度图像 ( u ),( \frac{\partial u}{\partial x} ) 和 ( \frac{\partial u}{\partial y} ) 分别表示水平和垂直方向的梯度。
- 去噪中的TV正则化:当应用于去噪时,TV正则化技术在保留边缘的同时最小化带噪图像的总变分。它通过寻找一个同时保持平滑区域和尖锐过渡(边缘)的去噪图像来实现这一点。
TV正则化在去噪中的作用
- 噪声减少:TV正则化有效地减少噪声,同时保留像边缘和纹理这样的尖锐特征。它惩罚通常与噪声相关的图像中的高频分量。
- 边缘保留:TV正则化的关键优势是其保留边缘的能力。由于它最小化了总变分,它倾向于分段平滑区域,有效地将边缘作为高变分区域保留下来。
- 数学优化:基于TV的去噪被表述为一个优化问题,旨在找到一个去噪图像,该图像在接近带噪图像的同时最小化总变分。使用梯度下降或更复杂的优化算法来迭代解决这个问题。
考虑和挑战
- 参数调整:TV正则化方法通常涉及调整参数,如正则化参数(( \lambda )),以平衡去噪和保留图像结构之间的关系。
- 计算复杂性:TV正则化中的优化可能在计算上很密集,特别是对于大图像或高分辨率数据。
- 伪影:在某些情况下,TV去噪可能会引入被称为阶梯效应的伪影,其中平滑区域可能看起来块状或显示出不自然的边缘。
应用
- 医学成像:TV正则化在各种医学成像任务中使用,如MRI去噪、CT图像重建等,以提高图像质量。
- 图像恢复:它被应用于图像恢复任务中,以去除噪声并增强图像细节。
- 计算机视觉:由于其保留边缘的特性,TV正则化在计算机视觉任务中找到应用,如对象检测、边缘检测和特征提取。
ROF(Rudin-Osher-Fatemi)模型
ROF模型是一种基于TV正则化的去噪方法,通过迭代解决一个凸优化问题来获得去噪图像。它为TV正则化增加了一个额外的约束,以增强去噪能力。