写在前面
-
本文内容
本文所属《从零开始跑通3DGS教程》系列文章;
sfm重建的点云已经丢掉了尺度信息,并且坐标系跟图像数据有关(SFM初始化选择的图像),所以如果想恢复物理真实尺度,以及在想要的视角下渲染,那么需要对尺度和坐标系进行编辑修正,下文介绍如何使用CloudCompare修改坐标系和尺度 -
平台/环境
linux, nvidia GPU, docker -
转载请注明出处:
https://blog.csdn.net/qq_41102371/article/details/146535842
目录
- 写在前面
- 系列文章
- 准备
- CloudCompare
- 打开点云
- 编辑
- 坐标系
- 尺度
- 修改colmap重建数据
- 参考
- 完
系列文章
-
介绍
从零开始跑通3DGS教程:介绍 -
数据(采集):
从零开始跑通3DGS教程:(一)数据(采集) -
SFM(colmap)计算初始点云和相机pose:
从零开始跑通3DGS教程:(二)SFM(colmap)计算初始点云和相机pose
该步骤将通过structure from motion算法,计算出每张图像的pose,以及整个场景和目标的稀疏点云 -
坐标系与尺度编辑(CloudCompare):
从零开始跑通3DGS教程:(三)坐标系与尺度编辑(CloudCompare) -
修改sfm生成的原始数据
从零开始跑通3DGS教程:(四)修改(缩放、空间变换)colmap生成的sfm结果 -
3DGS训练:
从零开始跑通3DGS教程:(五)3DGS训练 -
Gaussian Model编辑与渲染:
从零开始跑通3DGS教程:(六)Gaussian Model编辑与渲染
准备
CloudCompare
Cloudcompare的安装使用见:https://blog.csdn.net/qq_41102371/article/details/111713066
打开点云
将文件拖进cloudcompare就可以使用鼠标左(旋转)右(平移)滚轮(缩放)

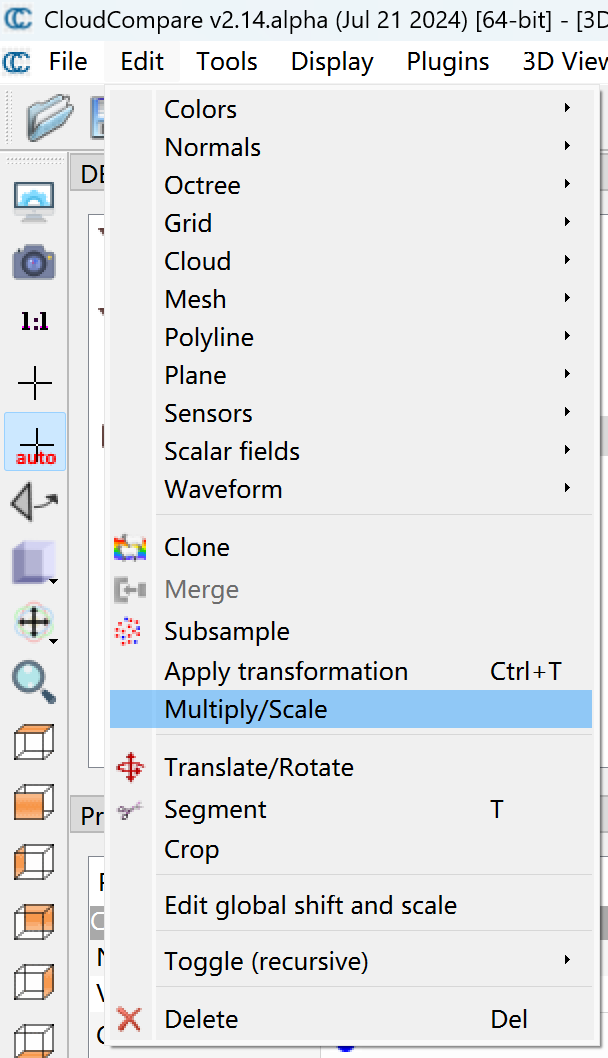
编辑
坐标系
添加坐标系

可能看到的是这样的

选中点云,进行旋转平移

这个按钮用于控制旋转平移操作的开关,空格键是快捷键
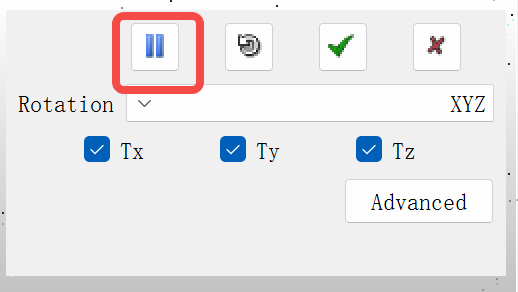
然后利用左侧的固定视角,和编辑栏,对点云进行坐标系对齐,怎么对齐看个人,坐标轴的xyz分别是red, green, blue

最终编辑后的三视图

这个时候我们发现,点云的属性里面记录了我们对齐操作的变换矩阵

将这个矩阵复制保存
尺度
选择两个点,查看距离

假设车宽2m,那么当前应该在整体点云上乘以scale = 2/1.88 = 1.063829787
先将原来的点云复制一份

然后,对复制的点云进行尺度变换

输入刚才的尺度

可以看到已经非常接近我们假设的2m了

修改colmap重建数据
下一步,将得到的变换矩阵和尺度,修改colmap生成的原始数据
从零开始跑通3DGS教程:(四)修改(缩放、空间变换)colmap生成的sfm结果
参考
文中已列出
完
主要做激光/影像三维重建,3DGS,配准、分割等常用点云算法,熟悉open3d、pcl等开源点云库,技术交流、咨询可私信